Hochfahren des Systems
Nach dem Einschalten des Systems wird das System hochgefahren. Nach dem Hochfahren wird die Systemanwendung auf dem Bedientableau angezeigt. Weitere Informationen zur Systemanwendung siehe „ Konfiguration des Programms Bildschirms“.
Im Falle der DART-Plattform (für Windows),
- Führen Sie die auf dem Desktop oder Laptop installierte DART-Plattform aus.
- Warten Sie etwa 5 Minuten, bis die Robotersteuerung hochgefahren ist.
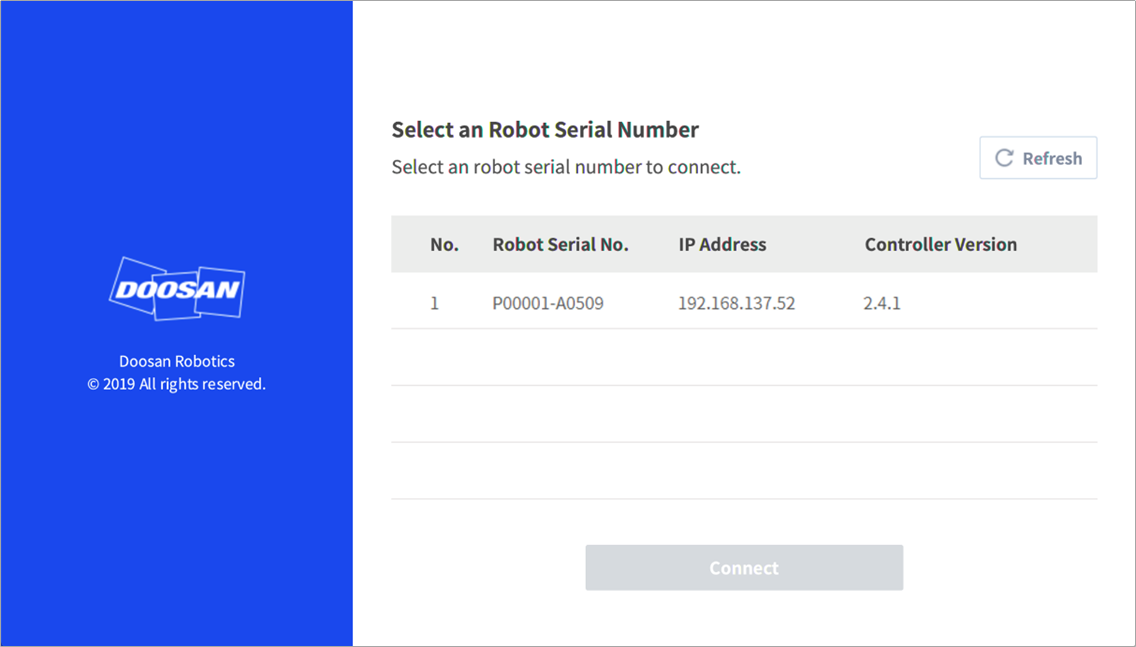
- Wenn die IP gesucht wird, überprüfen Sie die Seriennummer des mit dem Netzwerk verbundenen Geräts.
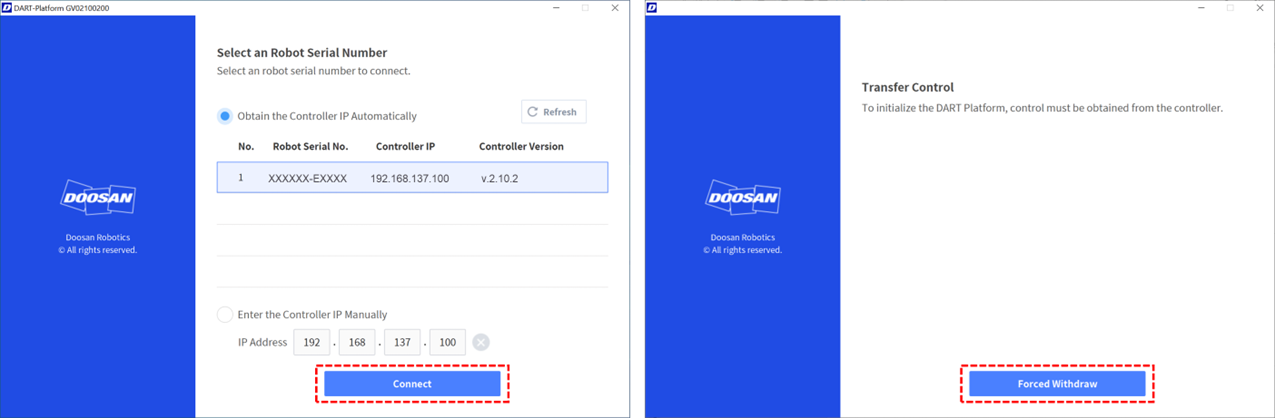
- Wählen Sie den Roboter aus, den Sie verbinden möchten, und klicken Sie auf die Schaltfläche „Verbinden“.
- Drücken Sie die Force Recall-Taste, um die Steuerung zu übertragen.
Hinweis
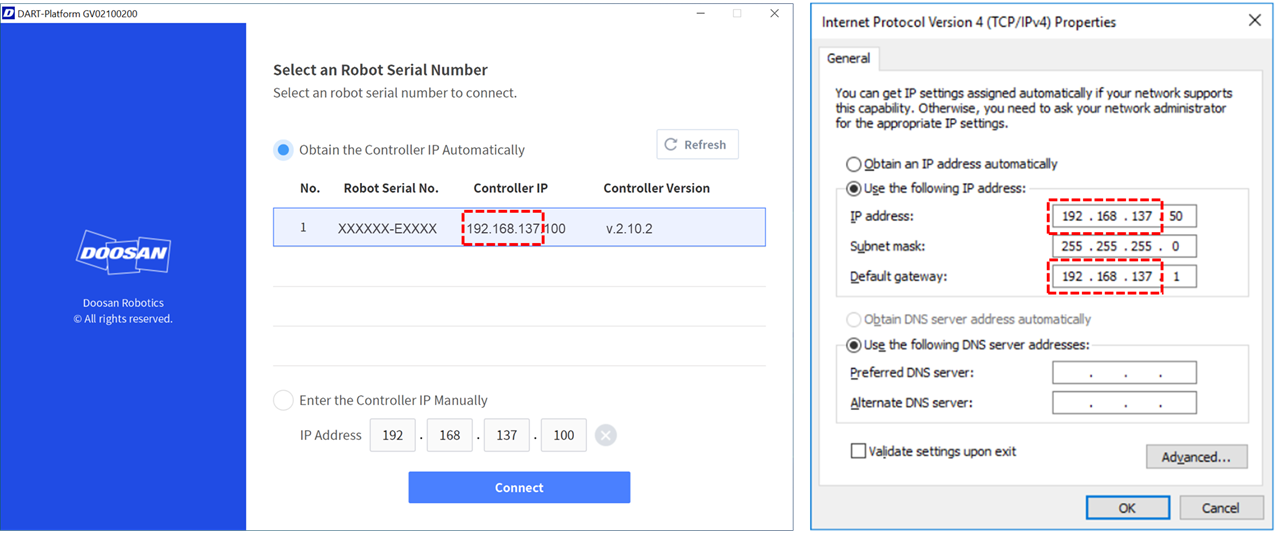
Wenn keine Verbindung zwischen dem Controller und der DART-Plattform besteht, ändern Sie das C-Klasse-Band der IP-Adresse und das Standard-Gateway des Desktops oder Laptops, auf dem DART-Platform installiert ist, in das C-Klasse-Band der IP-Adresse des Controllers, und versuchen Sie es erneut.
Wenn die IP nicht gesucht wird, wählen Sie „Enter the Controller IP Manually“ (Enter the Controller IP Manually) und fahren Sie mit der Verbindung fort. Die Standard-IP-Adresse des Controllers ist auf 192.168.137.100 eingestellt.
Wenn das erzwungene Zurückziehen der Steuerung weiterhin fehlschlägt, überprüfen Sie Folgendes:
Programm schließen und neu starten.
Stellen Sie sicher, dass die Not-Aus-Taste(n) nicht gedrückt ist/sind.
Wenn ein oder mehrere Paare digitaler Eingänge der Steuerung für das Not-Aus-/Fern-Not-Aus-/STO-Signal (aktiv niedrig) in der Sicherheits-E/A-Einstellung vorgesehen sind, stellen Sie sicher, dass alle bezeichneten Signale deaktiviert sind ( Hoch).
Prüfen Sie, ob die Steuerung fertig gebootet hat.
Überprüfen Sie den Roboterstatus. Im Fall von Remote Control, Recovery oder Backdrive kann die Ausführung der DART-Plattform fehlschlagen.
Hinweis
Servo On (Servo Ein): Um die Roboterstellung bewegen zu können, muss sich der Roboter im Status „Servo On“ (Servo Ein) befinden, d. h. die Gelenke des Roboters müssen mit Strom versorgt werden und der Roboter befindet sich im Standby-Zustand. Weitere Informationen zum Servo siehe „ Servo On (Servo Ein)“.
- Einstellung von Datum und Uhrzeit: Da Datum und Uhrzeit auf dem Bedientableau angezeigt werden und für die im Roboter gespeicherten Protokollmeldungen die Datums- und Uhrzeiteinstellung des Systems verwendet werden, müssen Datum und Uhrzeit beim ersten Hochfahren konfiguriert werden. Informationen zum Konfigurieren von Datum und Uhrzeit siehe „ Einstellung von Datum und Uhrzeit“.
- Die Verwendung der DART-Plattform ermöglicht die Steuerung des Roboters ohne Bedientableau.
- Die DART-Plattform zeigt einen Bildschirm an, der den Roboter als nach dem Hochfahren am Netzwerk verbunden anzeigt, und der Vorgang des Prüfens der Seriennummer und des Verbindens des Roboters erfolgt auf diesem Bildschirm.