
Gehe zu Ausgangsposition
Der Roboter wird zur Standardausgangsposition oder zur benutzerdefinierten Ausgangsposition bewegt, die in Settings (Einstellungen) im Hauptmenü konfiguriert wurde.
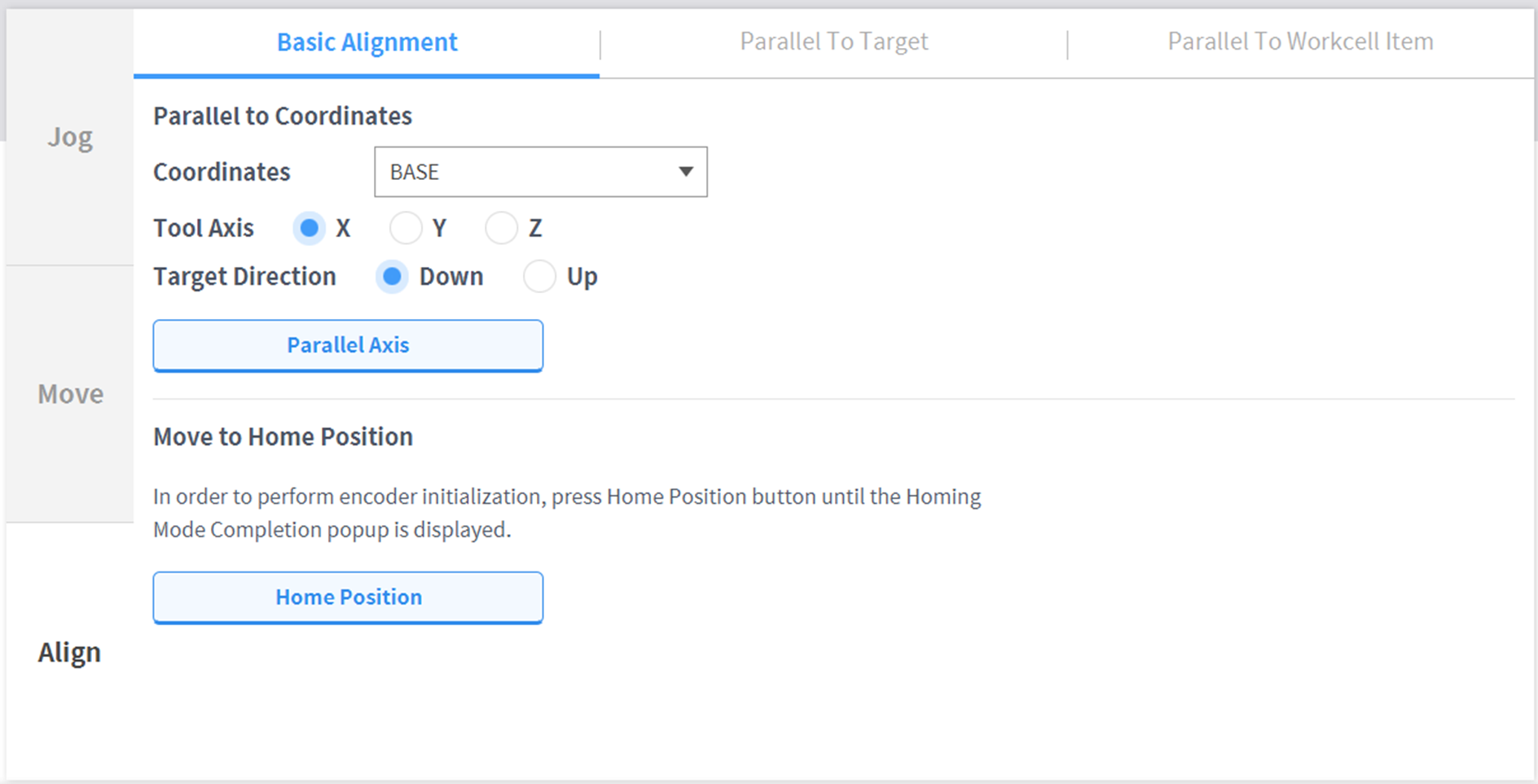
Registerkarte Align (Ausrichten) und dann die Registerkarte Basic Alignment (Grundausrichtung) auswählen.
Die Schaltfläche Home Position (Ausgangsposition) antippen und halten, um den Roboter zur Ausgangsposition zu bewegen.
Achtung
Wenn ein Roboter oder ein Gelenk eines Roboters ausgetauscht wird, muss die Benutzer-Ausgangsposition mithilfe des Programmierhandgeräts zurückgesetzt werden.
Wenn Sie eine Sicherung/Wiederherstellung durchführen, müssen Sie die Benutzer-Ausgangsposition auf dem Programmierhandgerät zurücksetzen.
Die Einstellung der Benutzer-Ausgangsposition von DART Studio wird nicht auf dem Programmierhandgerät wiedergegeben. Wenn die Benutzer-Ausgangsposition mithilfe von DART Studio eingestellt und dann mit dem Programmierhandgerät verwendet wird, muss die Benutzer-Ausgangsposition zurückgesetzt werden.