
Funktion des Bedienereingriffs
Wenn während des Roboterbetriebs ein Problem auftritt oder ein Benutzer einen Befehl erteilt, stoppt der Roboter den Betrieb und zeigt eine Popup-Meldung an, die es dem Bediener ermöglicht, einzugreifen und die Situation zu beheben. Nachdem der Benutzer das Problem behoben hat, wird die Aufgabe in der Programmzeile fortgesetzt, in der das Problem aufgetreten ist.
Hinweis
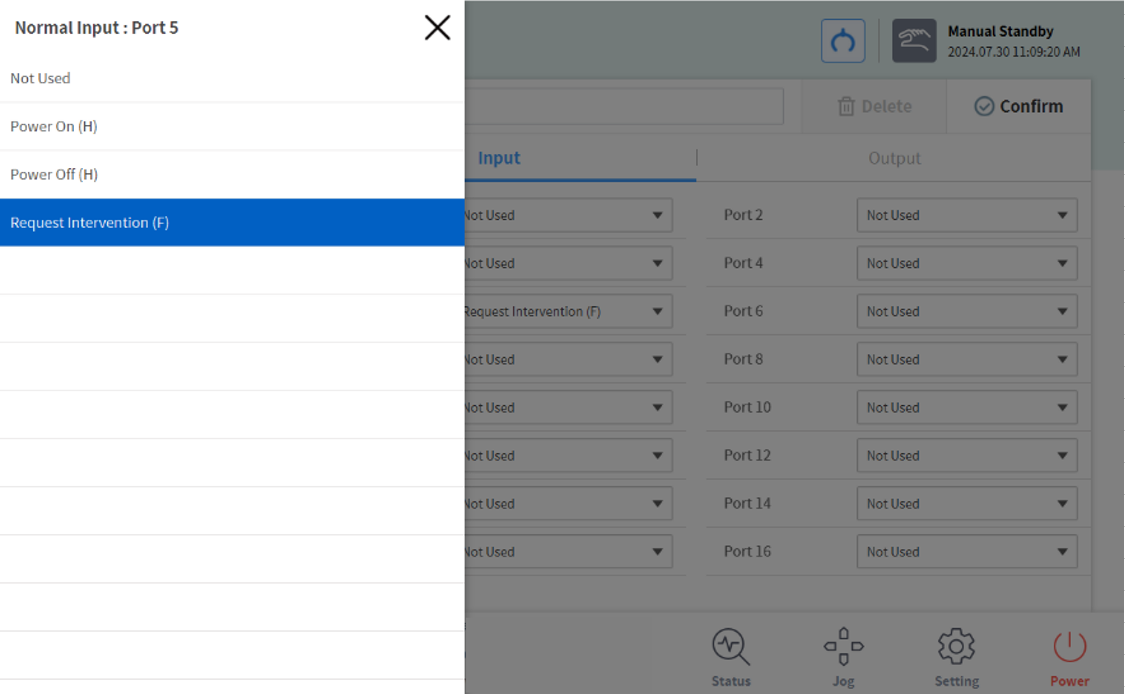
Um die Funktion des Arbeitereingriffs zu verwenden, müssen Sie eine der folgenden Einstellungen vornehmen.
Workcell Manager - Normal I/O - Input - Request Intervention (F)
Workcell Manager - Peripheral - Ananlog Welding Machine - Welding Input Signal
(Detaillierte Einstellungen finden Sie im Welding Techinical Note)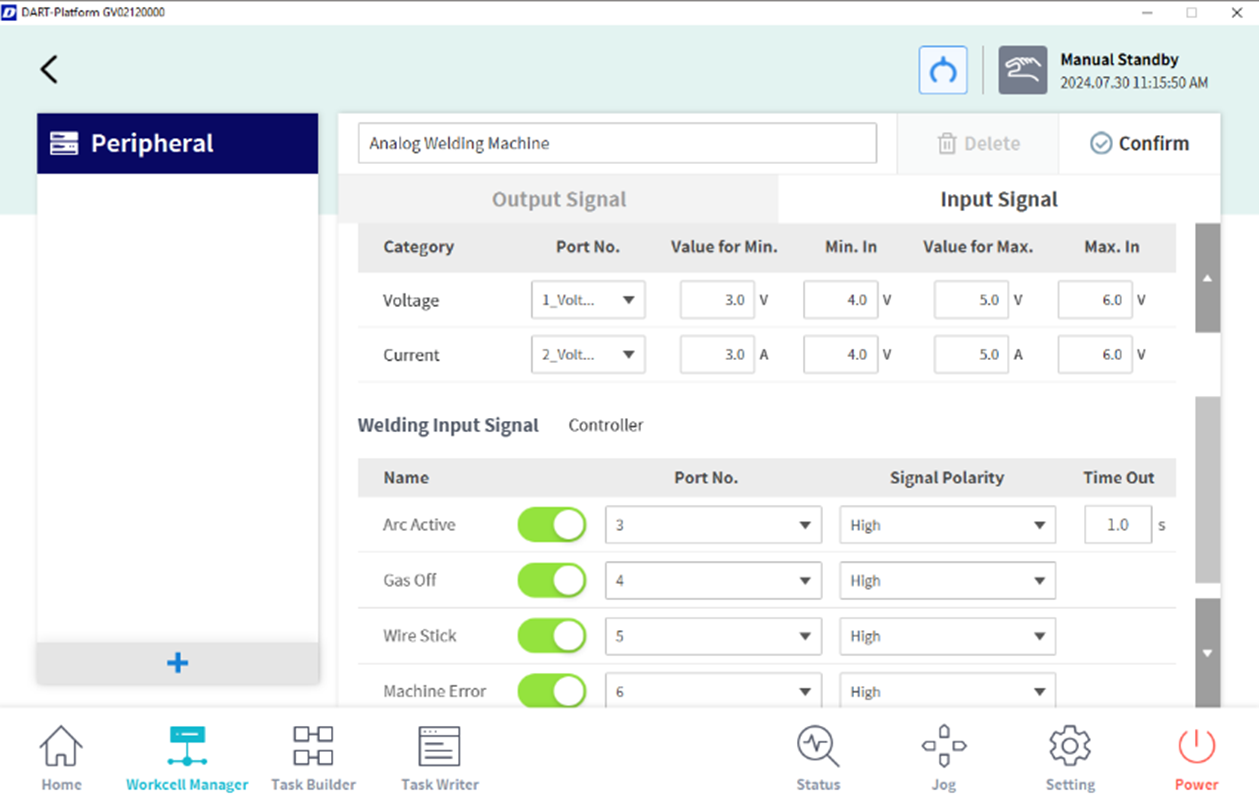
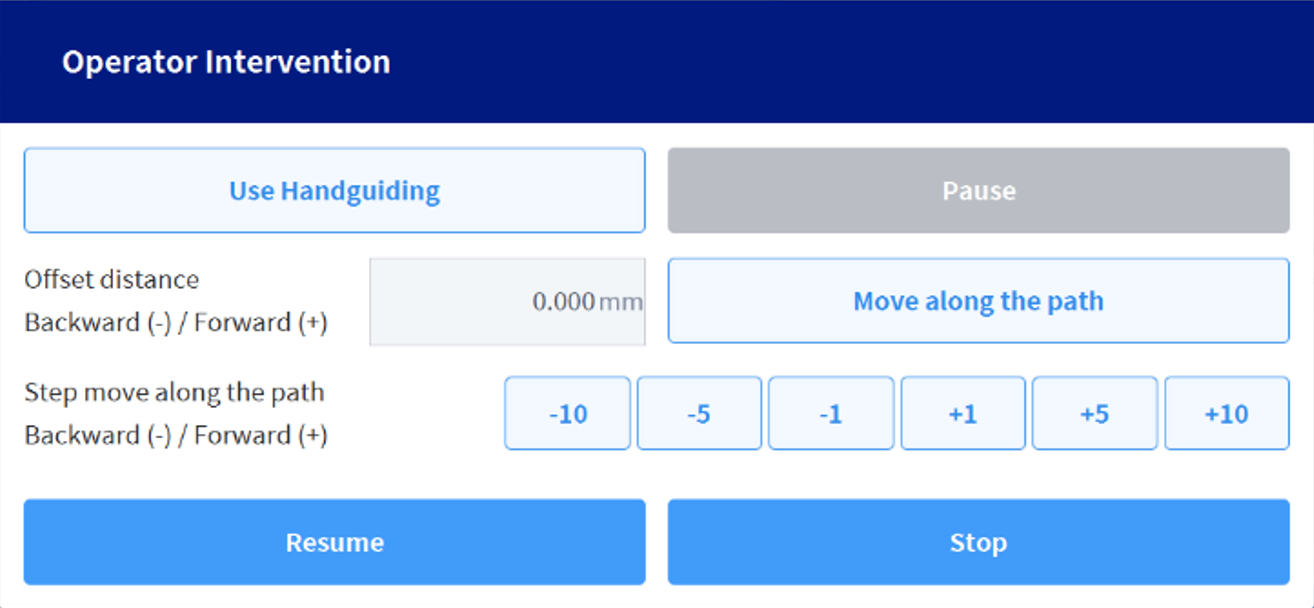
Die Schaltflächen „Entlang des Pfads bewegen“ und „Schrittbewegungsschaltfläche (-10,-5,-1,+1,+5,+10)“ führen dieselbe Aktion aus. Erstere bewegt sich jedoch von der Referenzposition um einen manuell eingegebenen Offset vorwärts oder rückwärts, während letztere einen Punkt um einen voreingestellten Schritt-Offset vorwärts oder rückwärts anvisiert. Nachdem eine Aktion mit den obigen Schaltflächen abgeschlossen wurde, wird durch Drücken einer weiteren Schaltfläche die aktuelle Position um den Offset verschoben.
Die Schaltfläche „Handführung verwenden“ wird nur aktiviert, wenn eine kollaborative Zone festgelegt ist und der Roboterzustand in den Handführungszustand wechselt, der direktes Lehren innerhalb der Zone ermöglicht. Danach können Sie das direkte Teachen aktivieren, indem Sie die Taste auf der Rückseite des Cockpits oder des Teaching Pendant drücken.
Im Handführungsmodus ändert sich die Schaltfläche „Handführung verwenden“ in die Schaltfläche „Handführung beenden“.
Wenn Sie die Schaltfläche „Handführung beenden“ drücken, endet der Handführungszustand. Zu diesem Zeitpunkt werden aus Sicherheitsgründen die aktuelle Roboterposition, der Winkel und die Werte des Stopppunkts (der Zeitpunkt, an dem das erste Popup auftritt) verglichen, um ein Popup zu generieren. Wenn ein Popup mit dem folgenden Inhalt auftritt, müssen Sie erneut direkt lehren, um die Position und Haltung des Roboters zu korrigieren, und es erneut versuchen.
Wenn die geradlinige Entfernung zwischen der aktuellen TCP-Position und dem TCP an der Stoppposition um mehr als 20 cm abweicht
Wenn die Differenz zwischen dem aktuellen Gelenkwinkel und dem Gelenkwinkel am Stopppunkt um mehr als 1~3 Achsen (10 Grad) / 4~5 Achsen (30 Grad) / 6 Achsen (60 Grad) abweicht
Diese Funktion wird nur während MoveL- / MoveC- / MoveB-Vorgängen unterstützt.
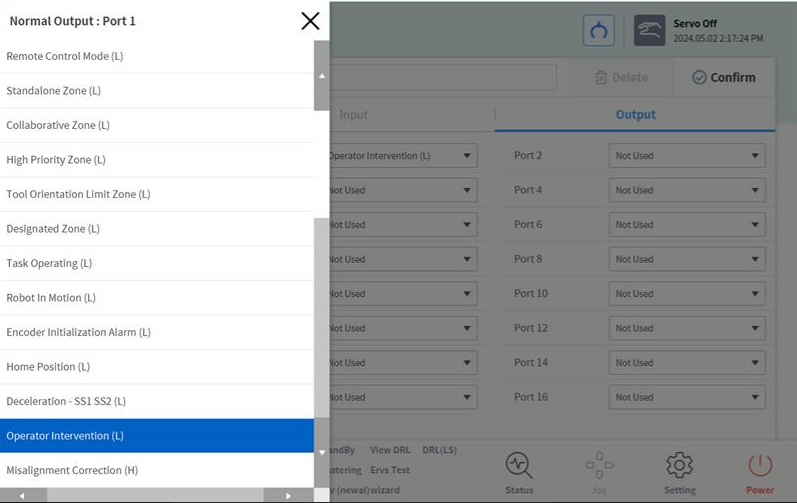
Sie können die Funktion „Normale Ausgabe“ verwenden, um zu signalisieren, dass ein Popup aufgetreten ist. Das Signal bleibt aktiv, während das Popup auftritt, und wird deaktiviert, wenn das Popup endet.
Workcell Manager - Normal I/O - Output - Operator Intervention (L)
Hier ist das Nutzungsszenario:
Empfangen Sie ein digitales Eingangssignal vom Benutzer oder einem angeschlossenen Gerät, während das Programm ausgeführt wird.
Der Roboter hält an und ein Popup mit der Bedienereingriffsmöglichkeit wird angezeigt.
(Bei Verwendung von Direktunterricht) Drücken Sie die Schaltfläche „Handführung verwenden“ und dann die Taste auf der Rückseite des Cockpits oder des Lehrgeräts, um Direktunterricht zu aktivieren. Nachdem der Direktunterricht abgeschlossen ist, drücken Sie die Schaltfläche „Handführung beenden“.
Drücken Sie die Schaltfläche „Entlang des Pfads bewegen“, um den Roboter entlang des Pfads zu bewegen.
Nachdem Sie den Roboter so weit wie gewünscht bewegt haben, drücken Sie die Schaltfläche „Fortsetzen“, um die Aufgabe des Roboters fortzusetzen und das Popup zu schließen.