
Manuelle Bedienung - Erfahren Sie, wie Sie joggen
OBLIGATORISCH NORMAL 15 MIN
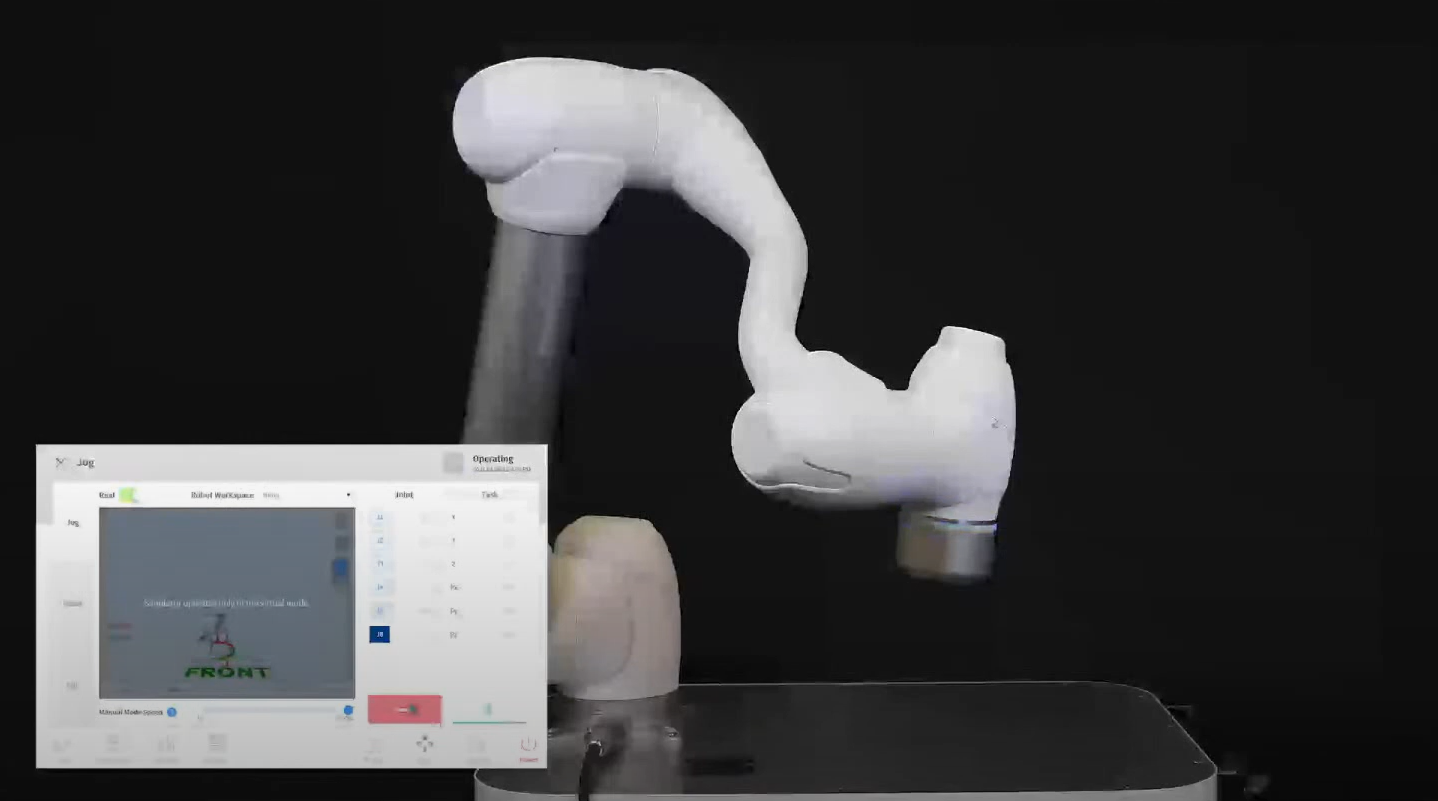
Der Benutzer kann auf der Registerkarte Jog eine manuelle Bewegungsmethode auswählen. Weitere Informationen zum Jog/Move/Align finden Sie unter Verfahrfunktion.
- Joggen: Es bewegt das Robotergelenk oder TCP auf die vom Benutzer ausgewählte Gelenkachse oder Koordinatenachse
- Verschieben: Es bewegt das Robotergelenk oder TCP zum vom Benutzer eingegebenen Zielpunkt
- Ausrichten: Es bewegt das Roboterende zur Ebene senkrecht zur vom Benutzer ausgewählten Ebene und die Koordinatenachse parallel zum Roboterende
Die Roboterbewegung besteht aus zwei Arten.
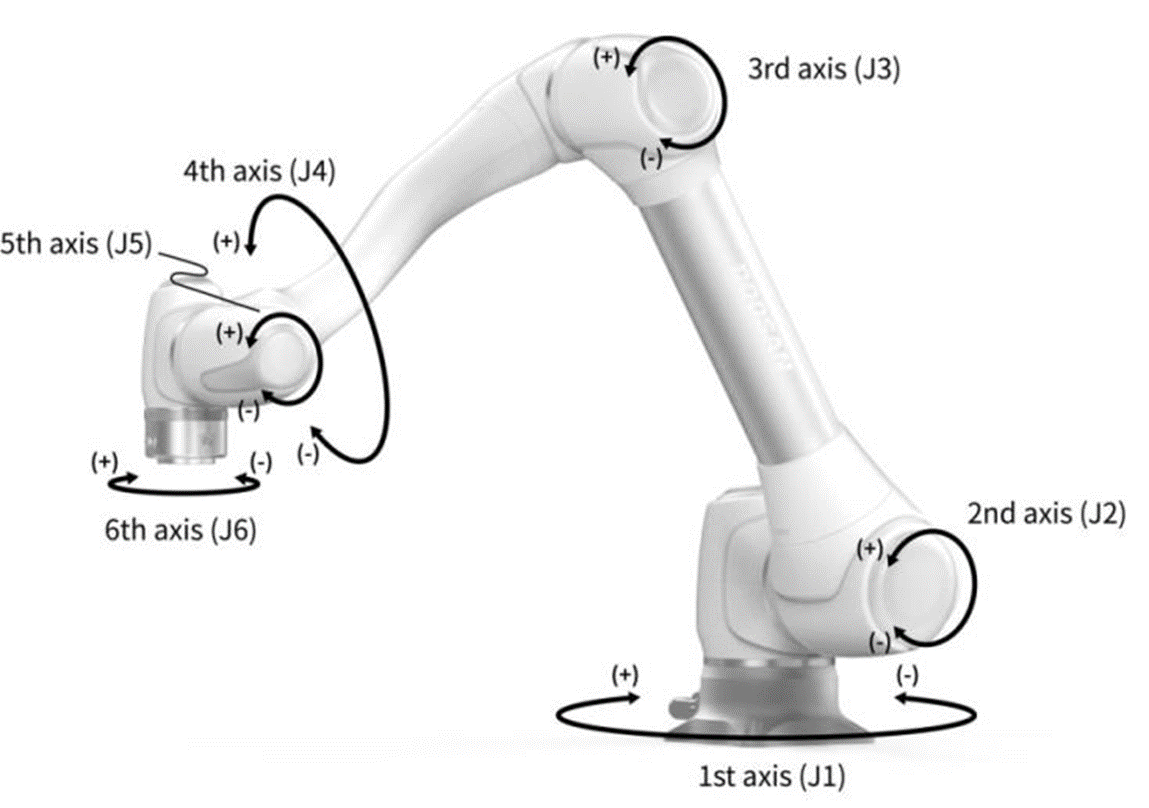
- Gemeinsame Bewegung: Sie bewegt jedes Gelenk linear mit einer rotierenden Bewegung
- Aufgabenbewegung: Das Ende wird linear zum Zielpunkt verschoben
Im Folgenden wird die Methode beschrieben, wie der Roboter mithilfe einer Gelenkbewegung vom Tippbildschirm aus bewegt wird:
- Wählen Sie die Registerkarte Verbindung.
- Wählen Sie die zu verschiebe-ende Achse aus. Sie können beispielsweise J1 auswählen.
- Drücken Sie die Taste +/-, um den Roboter zu bewegen. Der Roboter bewegt sich, während die Taste +/- gedrückt wird, und die aktuelle Position wird in Echtzeit auf dem Bildschirm angezeigt.
Im Folgenden wird die Methode beschrieben, wie der Roboter mithilfe der Aufgabenbewegung auf dem Tippbildschirm bewegt wird:
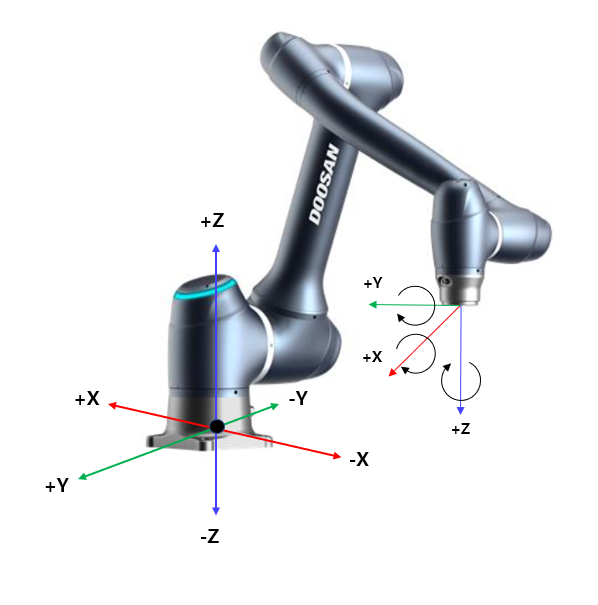
- Wählen Sie die Basiskoordinaten aus. Der Roboter kann entsprechend den BASISKOORDINATEN oder den WERKZEUGKOORDINATEN bewegt werden.
- Wählen Sie die zu verschiebe-ende Richtung aus. Beispielsweise kann die X-Achse ausgewählt werden.
- Drücken Sie die Taste +/-, um den Roboter zu bewegen. Der Roboter bewegt sich, während die Taste +/- gedrückt wird, und die aktuelle Position wird in Echtzeit auf dem Bildschirm angezeigt.
Weitere Informationen über die Bewegung von Jog, Bewegen und Ausrichten finden Sie unter (2.11.0.1_temp-de_DE) Bildschirm „Jog“ (Verfahren)bzw. Bewegungsbildschirm (2.11.0.1_temp-de_DE) Bildschirm für Ausrichten .
Hinweis
- Wenn der Umschalter des tatsächlichen Modus oben links im Jog-Bildschirm ausgeschaltet ist, bewegt sich der Roboter nur auf dem virtuellen Bildschirm links vom Jog-Bildschirm. Der eigentliche Roboter bewegt sich, wenn der Toggle-Schalter für den tatsächlichen Modus eingeschaltet ist.