Fähigkeit – Probier Proben aus
OPTIONAL NORMAL 20 MIN
Dieses Beispiel wird im Task Builder erstellt. Der Task Writer unterstützt die Skill-Funktion nicht.
Vorsicht
Bevor Sie die Probe versuchen, stellen Sie sicher, zu lesen und zu folgen (2.11.0.1_temp-de_DE) Sicherheitsvorkehrungen für die Verwendung. Weitere Informationen finden Sie unter (2.12-de_DE) TEIL 1. Sicherheitshandbuch.
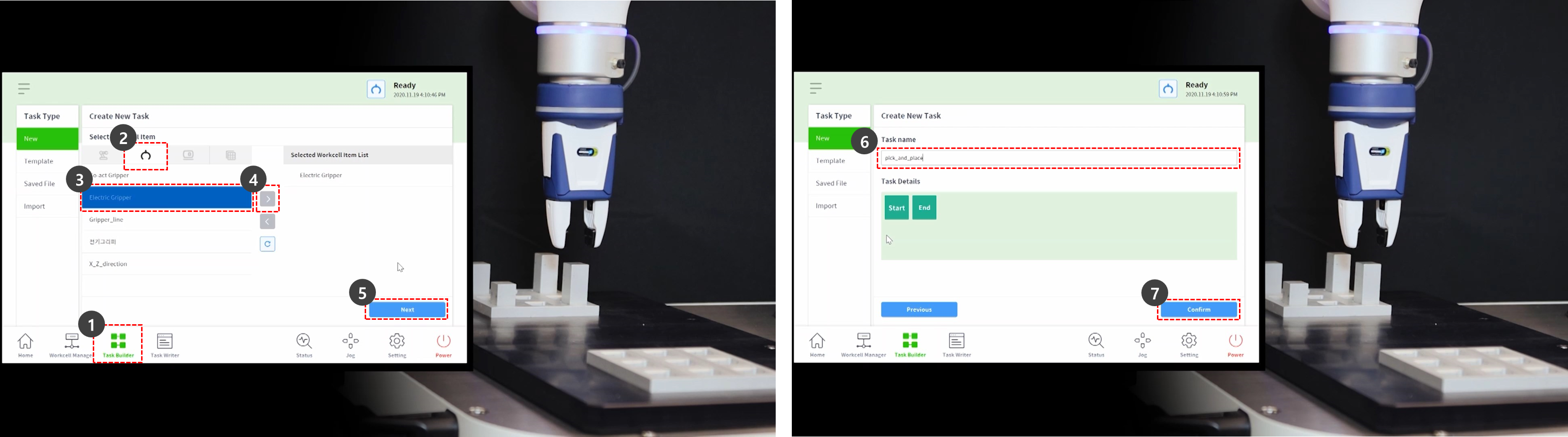
Wählen Sie im unteren Menü den Task Builder aus.
Wählen Sie das Symbol „Arbeitszellenelement auswählen“ > „Greifer“.
Wählen Sie den Greifer aus, der als Arbeitszellenelement registriert ist. Diese Probe kann nicht ausprobiert werden, wenn kein Greifer als Arbeitszellenelement registriert ist.
Drücken Sie die Taste >, um das Arbeitszellenelement als ausgewähltes Arbeitszellenelement zu registrieren.
Klicken Sie auf die Schaltfläche Weiter.
Geben Sie den Aufgabennamen ein.
Drücken Sie Bestätigen.
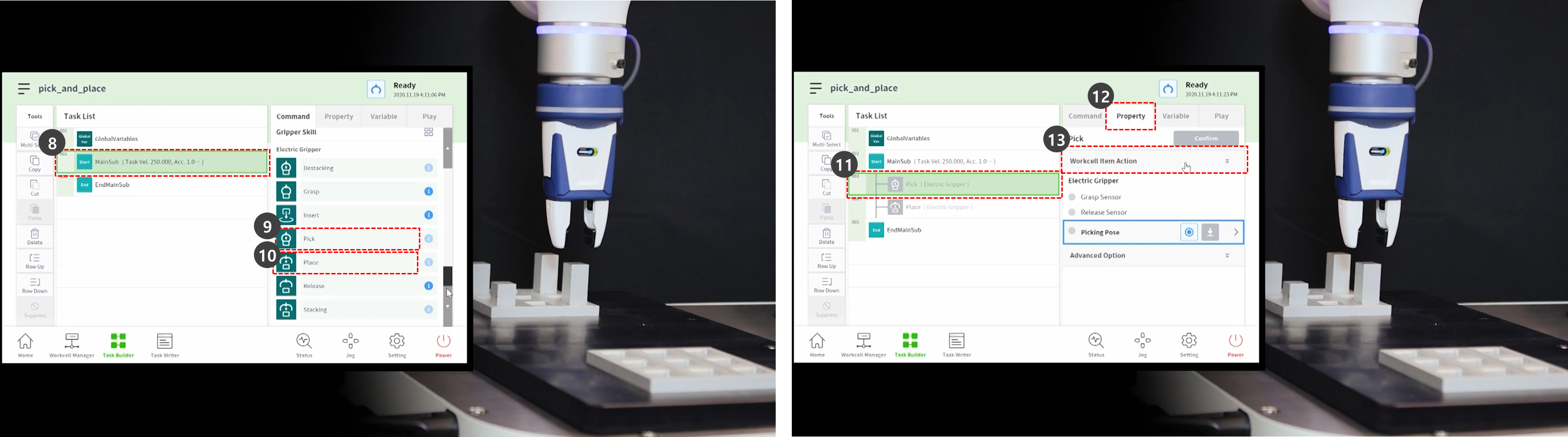
Wählen Sie in der zweiten Zeile der Aufgabenliste den Befehl MainSub aus. In der nächsten Zeile der ausgewählten Zeile wird ein neuer Befehl hinzugefügt.
Fügen Sie den Befehl „Fähigkeit auswählen“ hinzu.
Fügen Sie den Befehl „Skill platzieren“ hinzu.
Wählen Sie in der dritten Zeile der Aufgabenliste den Befehl Auswahl aus.
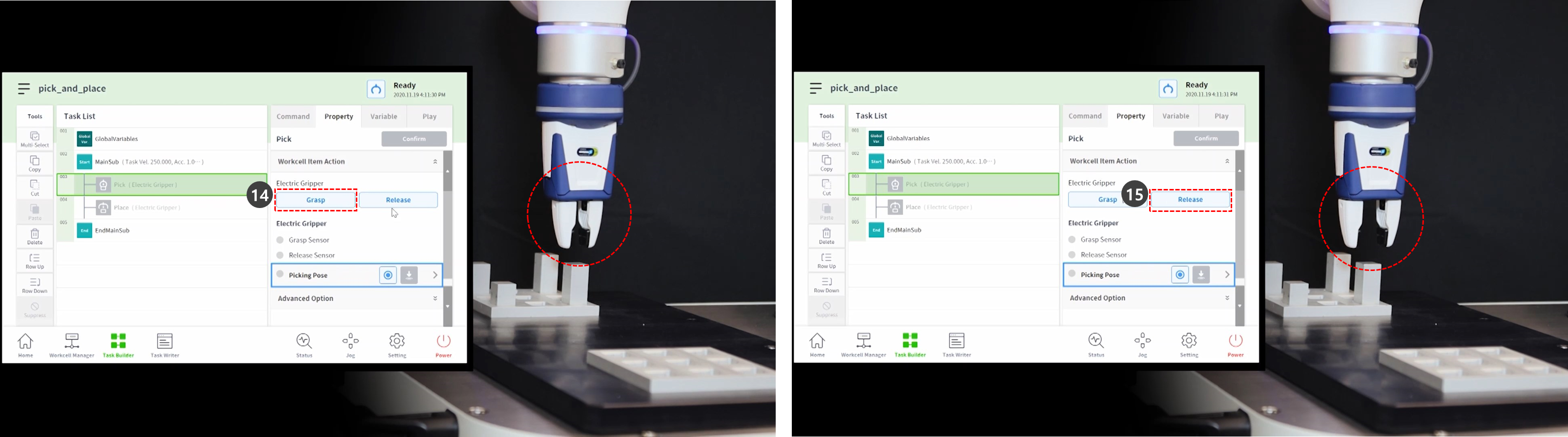
Wählen Sie die Registerkarte Eigenschaft aus.
Drücken Sie die Aktion für das Element Arbeitszelle, um das Menü zu erweitern. Wenn das Objekt der Greiferzelle ausgewählt ist, kann die Greiferaktion während der Aktion des Arbeitszellenelements getestet werden.
Um den Greifer zu testen, drücken Sie die Greiftaste, und führen Sie eine Greifbewegung durch.
Um den Greifer zu testen, drücken Sie die Entriegelungstaste, und führen Sie eine Freigabebewegung durch.
Bei leichten Werkstücken das Werkstück in den Greifer legen und die Greiftaste drücken, damit der Roboter das Werkstück hält. Die Durchführung des Teach-in während der Greifer ein Werkstück hält, kann dabei helfen, eine genaue Position zu erreichen.
Es ist jedoch nicht zwingend erforderlich, dass der Roboter während des Lernens ein Werkstück hält, sondern ein Beispiel.
Bei schweren Werkstücken kann es zu gefährlichen Situationen kommen, da der Greifer das Werkstück verlieren kann.
Bei schweren Werkstücken muss das Werkzeuggewicht der Werkzeugeinstellungen das Werkzeuggewicht und das Werkstückgewicht enthalten.
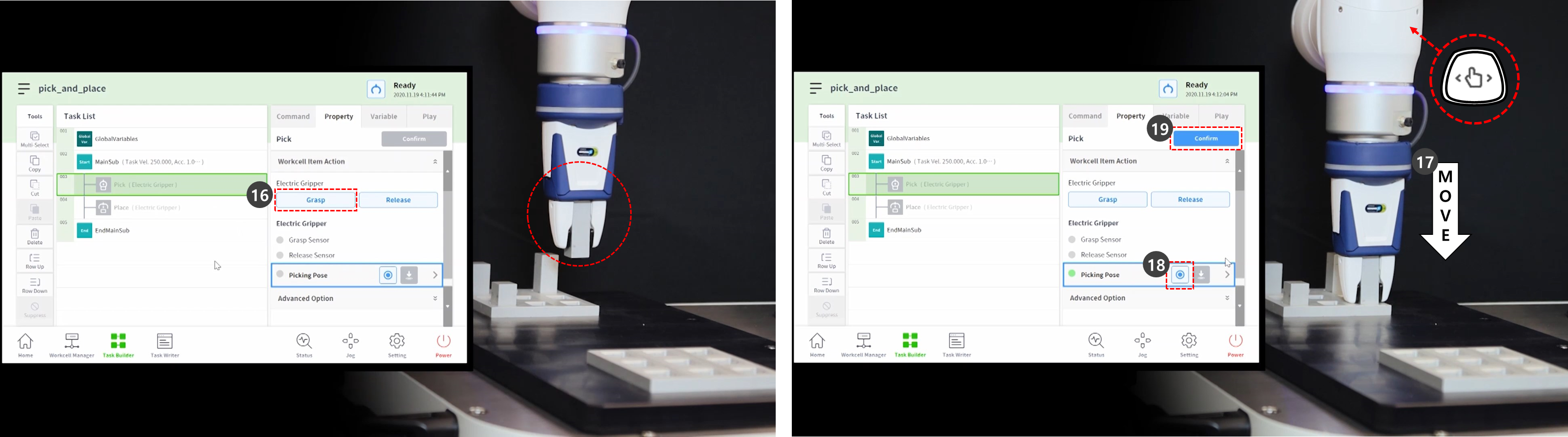
Verwenden Sie direktes Lernen, um den Roboter zu dem Punkt zu bewegen, an dem die Aufnahme durchgeführt wird.
Halten Sie die Handführungstaste im Cockpit gedrückt, um den Roboter zu bewegen.
Drücken Sie die Pose-Taste der Pose.
Drücken Sie die Taste Bestätigen.
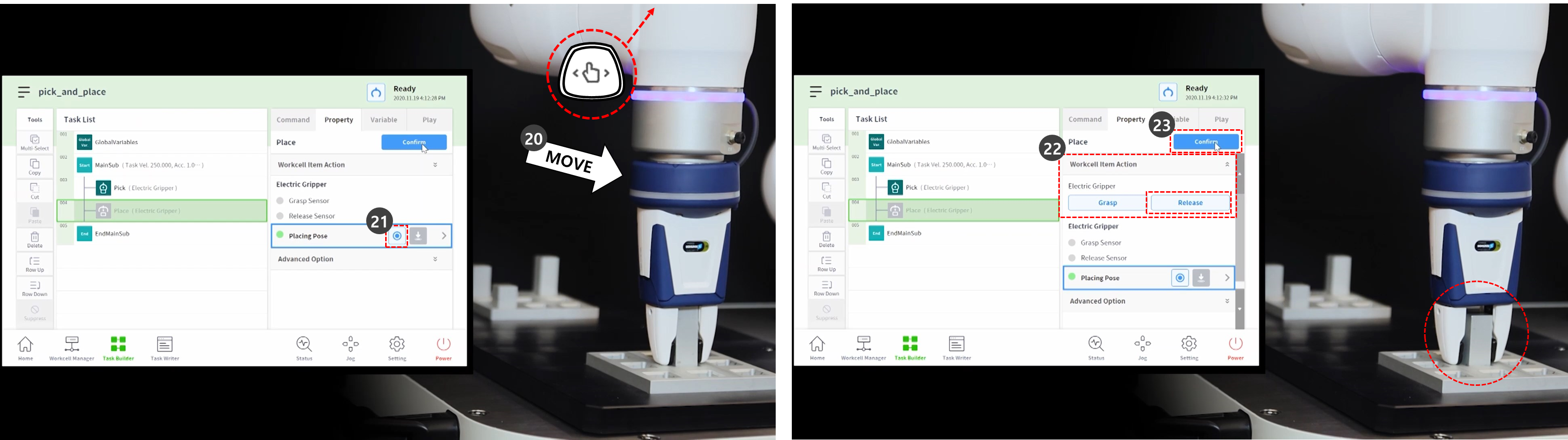
Verwenden Sie direktes Lernen, um den Roboter an den Punkt zu bewegen, an dem die Stelle durchgeführt werden soll.
Drücken Sie die Pose-Taste der platzierenden Pose.
Um das Werkstück aus dem Greifer zu lösen, drücken Sie die Entriegelungstaste.
Drücken Sie die Taste Bestätigen.
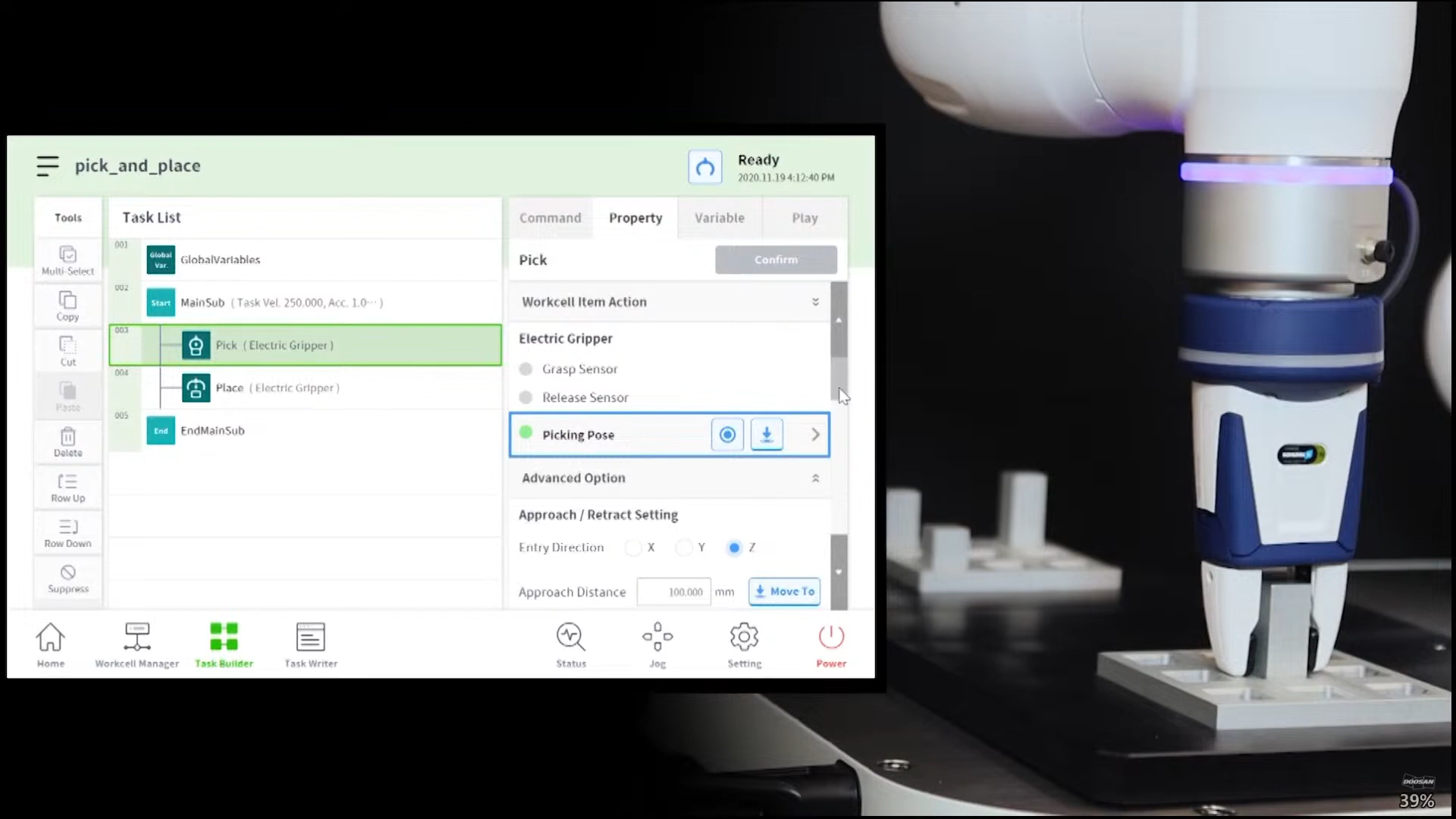
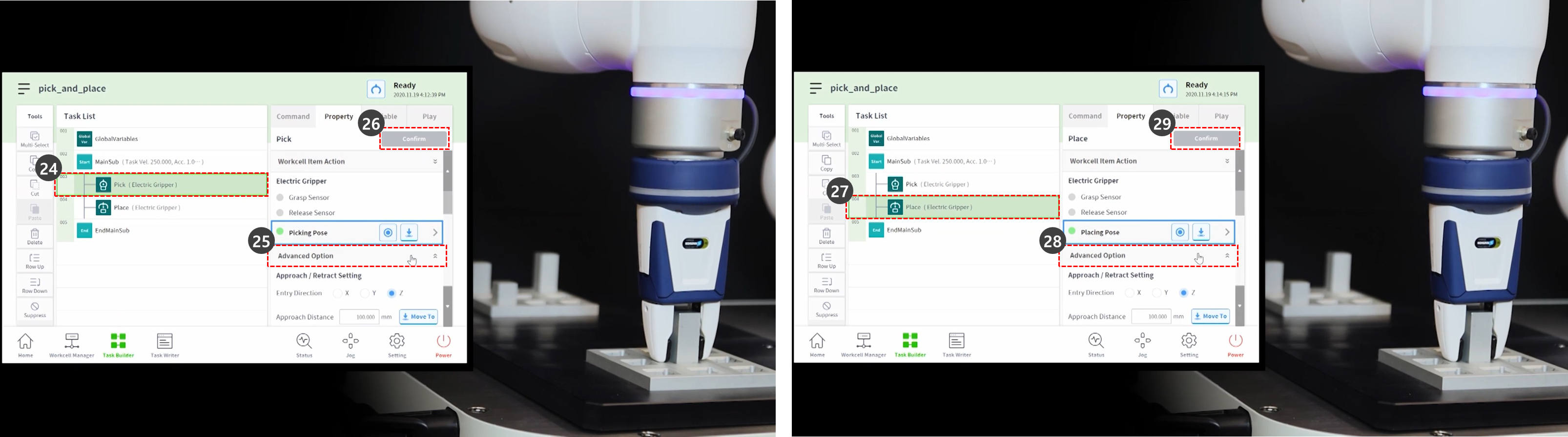
Um detaillierte Einstellungen für die Befehle „Pick and Place“ festzulegen, wählen Sie den Befehl „Pick“ in der dritten Zeile der Aufgabenliste aus.
Drücken Sie die Option Erweitert, um das Menü zu erweitern, und stellen Sie Folgendes ein: Verwenden Sie Standardwerte für Elemente, die unten nicht beschrieben werden.
Eingaberichtung: Z-Achse
Sie legt die Richtung für die Eingabe der Aufnahmeposition fest.
Annäherungsabstand: 100 mm
Er legt den Abstand fest, bevor der Roboter sich der Aufnahmeposition nähert. Sie sichert einen ausreichenden Anflugabstand.
Rückzugsabstand: 100 mm
Er legt den Abstand fest, nachdem der Roboter in der eingestellten Richtung von der Aufnahmeposition zurückgefahren wurde. Es sichert einen ausreichenden Abstand zum Einfahren.
Anfluggeschwindigkeit: 100 mm/s
Sie legt die Anfluggeschwindigkeit niedriger als den Standardwert fest, wenn sich der Roboter einem Objekt nähert.
Compliance-Kontrolle: Aktiviert (grün)
Sensorkontakt: Aktiviert (grün)
Sie ermöglicht Compliance-Kontrolle und Kontakterkennungsfunktionen.
Kontaktkraft: 10N
Kontakttoleranz: 10 mm
Kraft: 15N
Kratzeroffset: 2mm
Greifer Vor Der Kommissionierung Freigeben: Aktiviert (grün)
Er versetzt den Greifer in den Zustand „Freigeben“, bevor er sich dem Aufnahmeort nähert.
Werkzeuggewicht: Keine
Wenn das Werkstück nicht leicht ist, müssen Werkstückgewicht und Werkzeuggewicht addiert, als Werkzeuggewicht-Zelle hinzugefügt und ausgewählt werden.
Drücken Sie die Taste Bestätigen.
Wählen Sie in der vierten Zeile der Aufgabenliste den Befehl Platzieren aus.
Drücken Sie die Option Erweitert, um das Menü zu erweitern, und stellen Sie Folgendes ein: Verwenden Sie Standardwerte für Elemente, die unten nicht beschrieben werden.
Eingaberichtung: Z-Achse
Annäherungsabstand: 100 mm
Rückzugsabstand: 100 mm
Anfluggeschwindigkeit: 100 mm/s
Compliance-Kontrolle: Aktiviert (grün)
Sensorkontakt: Aktiviert (grün)
Sie ermöglicht Compliance-Kontrolle und Kontakterkennungsfunktionen.
Kontaktkraft: 10N
Kontakttoleranz: 10 mm
Kraft: 15N
Werkzeuggewicht: Keine
Drücken Sie die Taste Bestätigen.
Verwenden Sie direktes Teach-in, um den Roboter an den Punkt zu bringen, an dem Pick&Place beginnt.
Werkstück zur Aufnahmeposition fahren.
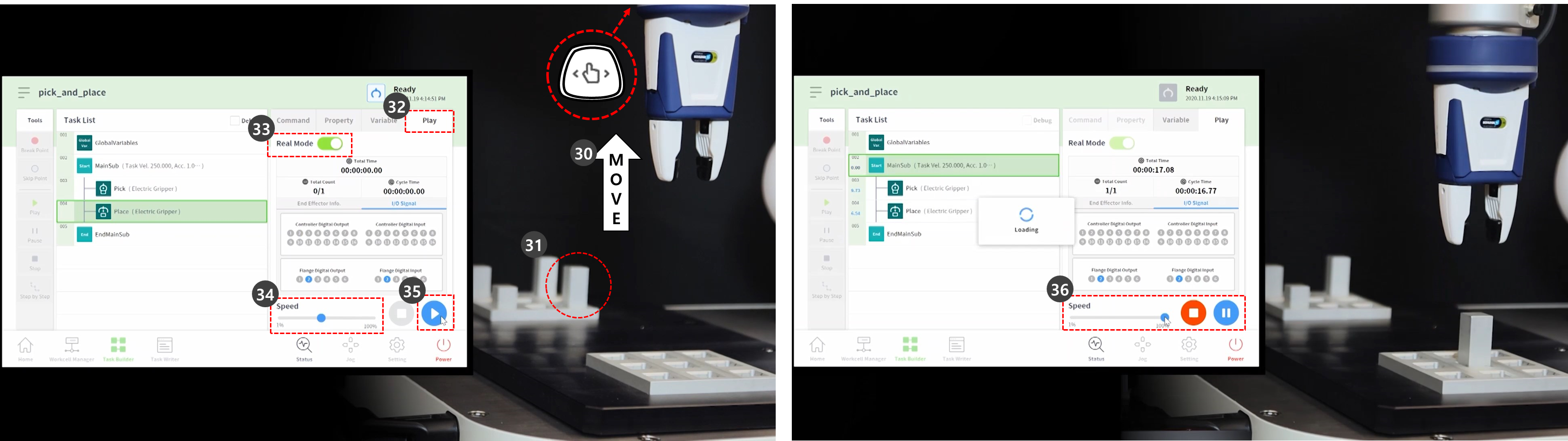
Wählen Sie die Registerkarte Wiedergabe.
Aktivieren Sie die Umschalttaste Real Mode.
Stellen Sie den Geschwindigkeitsschieber auf 10-30% ein.
Mit diesem Geschwindigkeitsschieber wird die eingestellte Geschwindigkeit aller Befehle auf den ausgewählten % eingestellt.
Wenn eine Aufgabe nach der Erstellung zum ersten Mal ausgeführt wird, kann die Ausführung mit niedriger Geschwindigkeit unerwartete Risiken verhindern.
Drücken Sie die Wiedergabetaste.
Wenn die Aufgabe ohne Probleme abgeschlossen wurde, stellen Sie die Geschwindigkeit wieder auf die Standardeinstellung 100 % ein, und testen Sie sie erneut.