
Ausführung auf der Grundlage des Roboterwerkzeugs
Um den Roboter basierend auf dem Roboterwerkzeug zu bewegen, wie folgt vorgehen:
Registerkarte Task (Aufgabe) im Bildschirm Jog (Verfahren) auswählen.
„Base“ (Basis) oder „World“ als Anzeigekoordinaten auswählen und Tool (Werkzeug) basierend auf dem Bezugspunkt der Aufgabenkoordinaten festlegen.
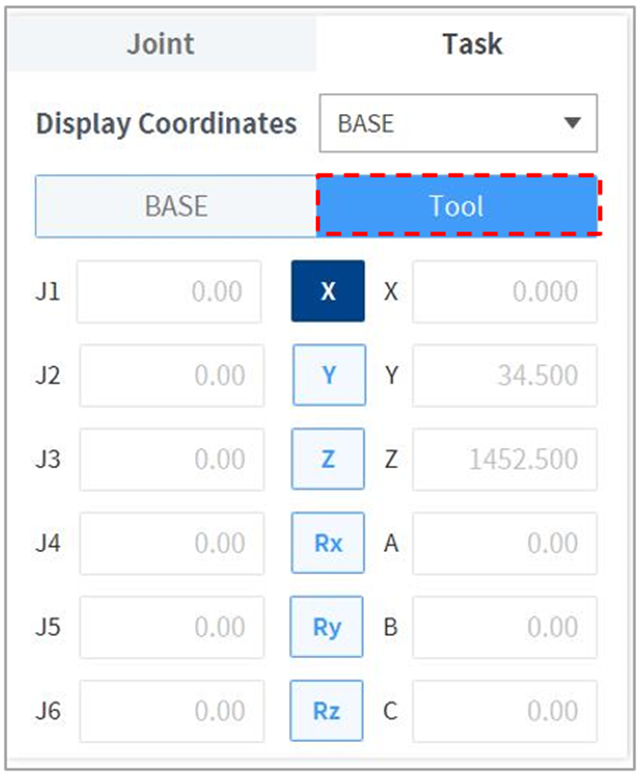
Die Werkzeugkoordinaten für die Bewegung auswählen.
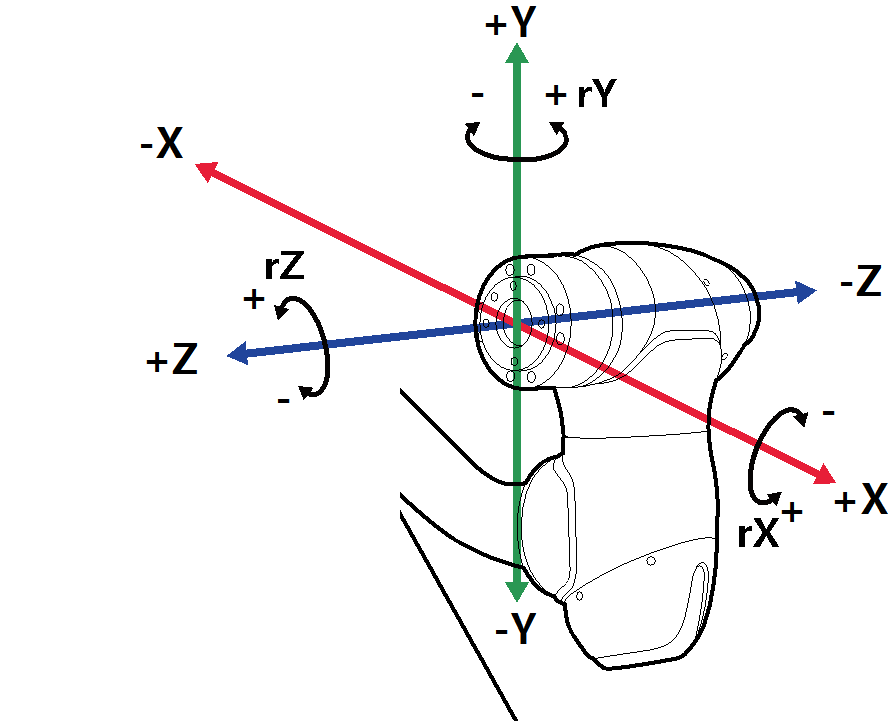
Die Richtungstaste (


Hinweis
Im virtuellen Modus findet die Sicherheitszone keine Anwendung.
Rx, Ry und Rz werden entsprechend dem TCP (tool center position: Werkzeugreferenzpunkt) ausgeführt.