
Multisegmenteinstellung (Einstellung mehrerer Wegpunkte)
Abhängig vom Bewegungsbefehl kann es notwendig sein, zwei oder mehr Wegpunkte zu konfigurieren. Jeder Wegpunkt wird Segment genannt. Beim Hinzufügen eines Wegpunkts wird eine Zeile am Ende des Befehls hinzugefügt. Bewegungsbefehle, für die zwei oder mehr Segmente erforderlich sind, werden „Multisegment-Bewegungsbefehle“ genannt.
Im folgenden Beispiel wird der „Move SJ“-Befehl konfiguriert.
- Add Pose (Stellung hinzufügen) in den Befehlseigenschaften antippen.
- „Segment 1“ wird als letzte Zeile des „Move SJ“-Befehls hinzugefügt.

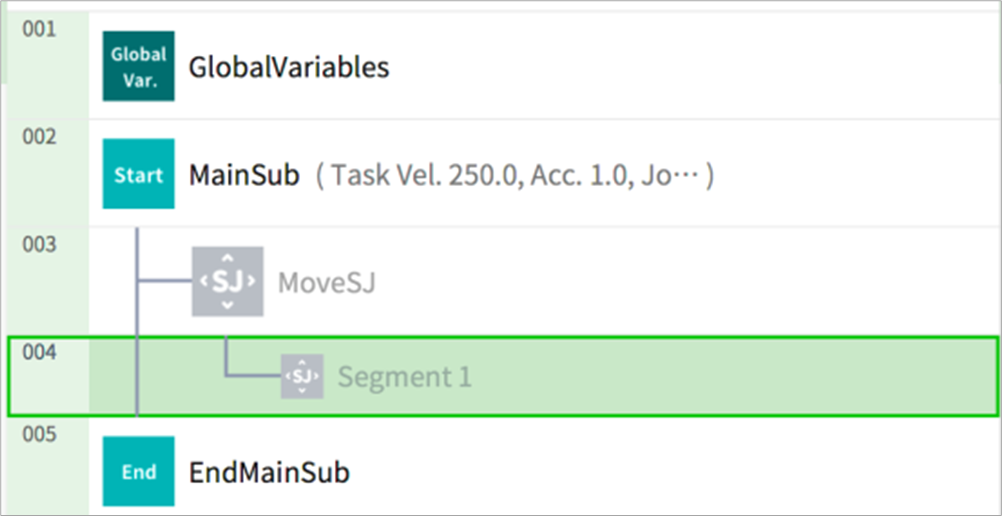
- „Segment 1“ wird als letzte Zeile des „Move SJ“-Befehls hinzugefügt.
- Werkzeug mit der Verfahrfunktion oder durch direktes Einlernen an die gewünschte Position bewegen.
- Schaltfläche Save Pose (Stellung speichern) in den Segmenteigenschaften antippen, um die Roboterwerkzeugposition zu speichern.
- Schritte 1–3 wiederholen, um weitere Segmente hinzuzufügen.