
Einstellung für Werkzeuggewicht
Um das Werkzeuggewicht des Roboters zu konfigurieren, die Schaltfläche
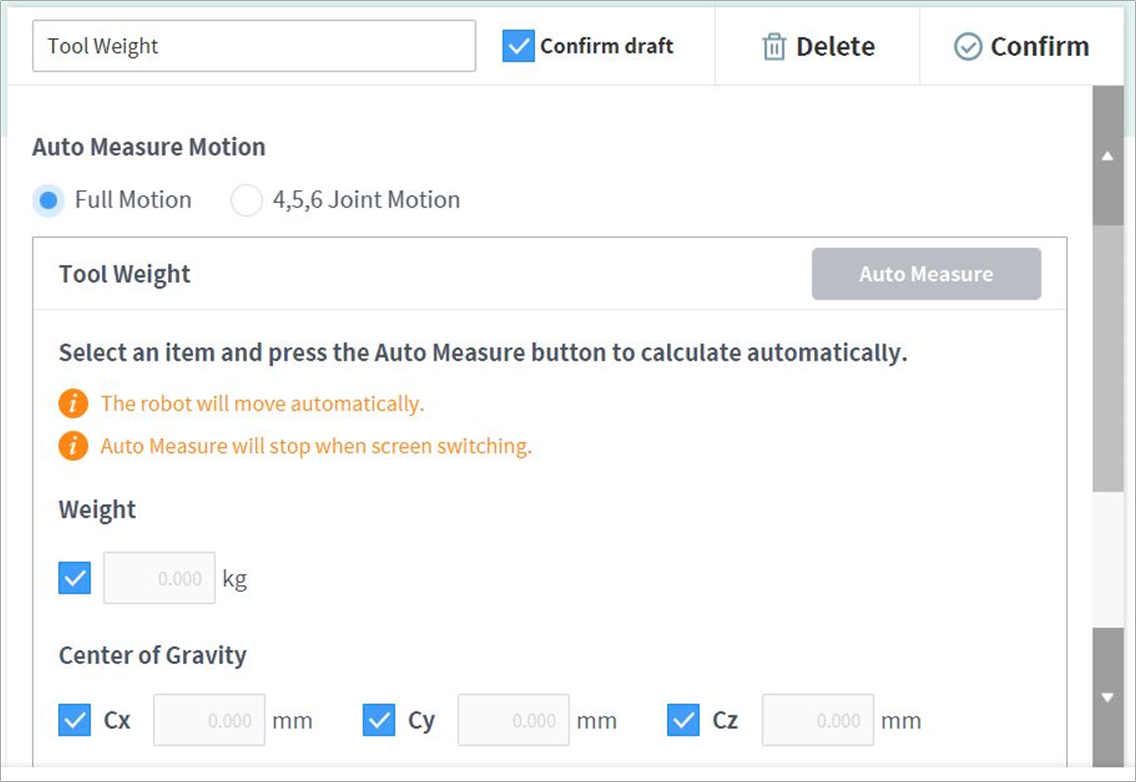
Automatische Messung des Werkzeuggewichts:
- Eine automatische Bewegungsberechnungsmethode auswählen.
- „All Motion“ (Alle Bewegungen): Zum Messen des Werkzeuggewichts werden alle Gelenke verwendet.
- 4, 5, 6 Motion (Bewegung von 4, 5, 6): Zum Messen des Werkzeuggewichts werden die Gelenke 4, 5 und 6 verwendet.
- Das Kontrollkästchen des zu ermittelnden Parameters (Gewicht, Schwerpunkt) aktivieren.
- Der Benutzer kann einen bekannten Parameterwert eingeben, ohne das Kontrollkästchen zu aktivieren.
- Wenn der Benutzer einen bekannten Parameter eingibt, werden die Werte von Parametern, deren Kontrollkästchen aktiviert ist, dem eingegebenen Parameterwert entsprechend für die Berechnung von Gewicht oder Schwerpunkt verwendet.
- Schaltfläche Auto Calculate (Automatisch berechnen) antippen.
Warnung
- Wenn das Kontrollkästchen für die automatische Berechnung des Gewichts deaktiviert ist, muss eine positive reelle Zahl eingegeben werden.
(Der Schwerpunkt kann eine negative reelle Zahl oder 0 sein.) - Bevor die automatische Berechnung durchgeführt wird, müssen alle Hindernisse entfernt werden.
- Für die Durchführung einer automatischen Berechnung für die Gelenke 4, 5 und 6 muss der 3-Achsen-Winkel größer als +30 Grad oder kleiner als -30 Grad sein.
- Außerdem muss beachtet werden, dass Sicherheitsüberwachungsfunktionen während der automatischen Berechnung deaktiviert sind.
- Während der automatischen Berechnung wird die Schaltfläche „Auto Calculate“ (Autom. berechnen) zur Schaltfläche „Stop“ (Beenden), damit der Benutzer die automatische Berechnung beenden kann. Wird die Berechnung beendet, werden die Werte für Gewicht und Schwerpunkt zurückgesetzt.
Hinweis
Die Fehlertoleranz bei der automatischen Messung des Werkzeuggewichts beträgt ±0,5 kg (1,1 lb).