
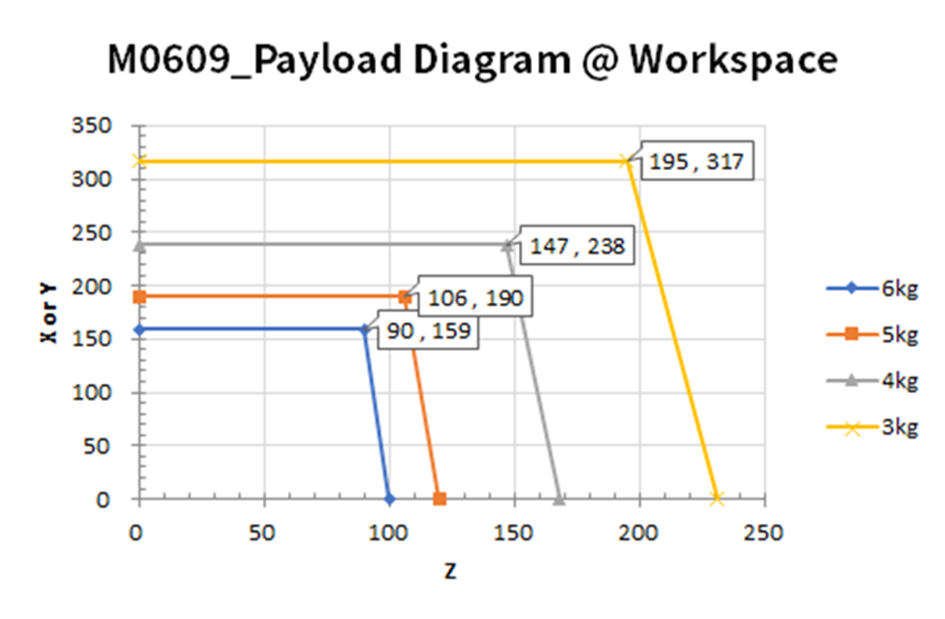
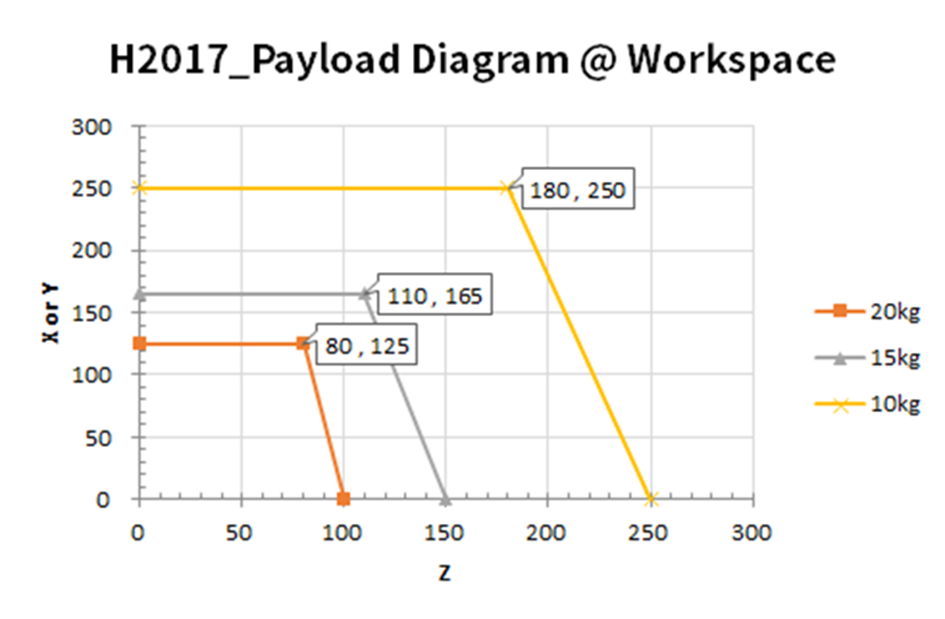
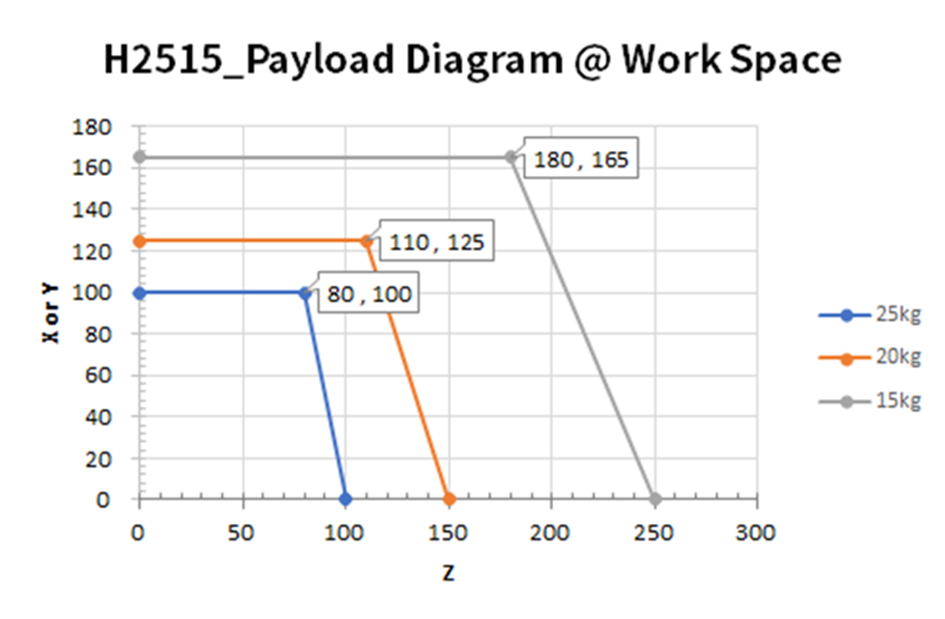
Maximale Traglast innerhalb des Aktionsraums
Die maximale Traglast des Roboters innerhalb seines Aktionsraums ändert sich entsprechend dem Abstand vom Schwerpunkt. Traglast gemäß Abstand ist wie folgt:
Hinweis
Dieses Lastdiagramm setzt ein geringes Ladevolumen des Werkzeugs voraus. Werkzeuge mit einem größeren Volumen werden im Vergleich zu einem Werkzeug gleichen Gewichts, aber geringeren Volumens größere Einschränkungen in Bezug auf Traglast oberhalb des Werkzeugschwerpunkts aufweisen, und in solchen Fällen kann es zu Vibrationen kommen.
M0609
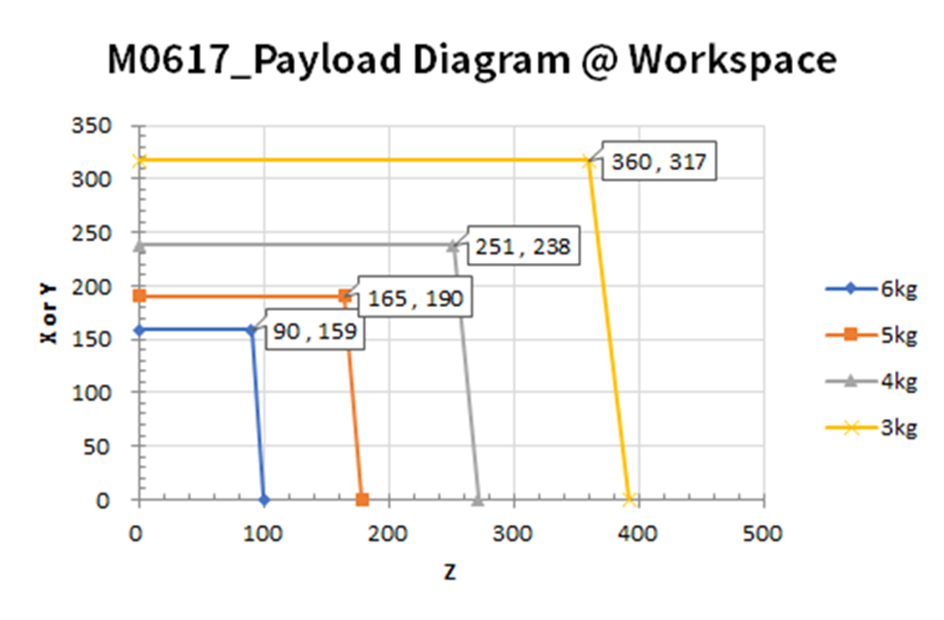
M0617
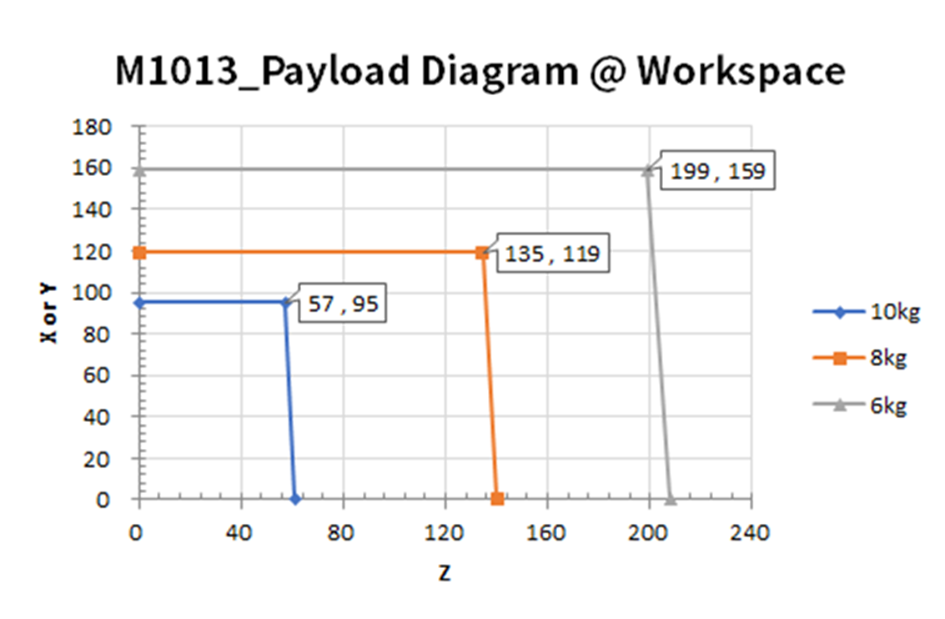
M1013
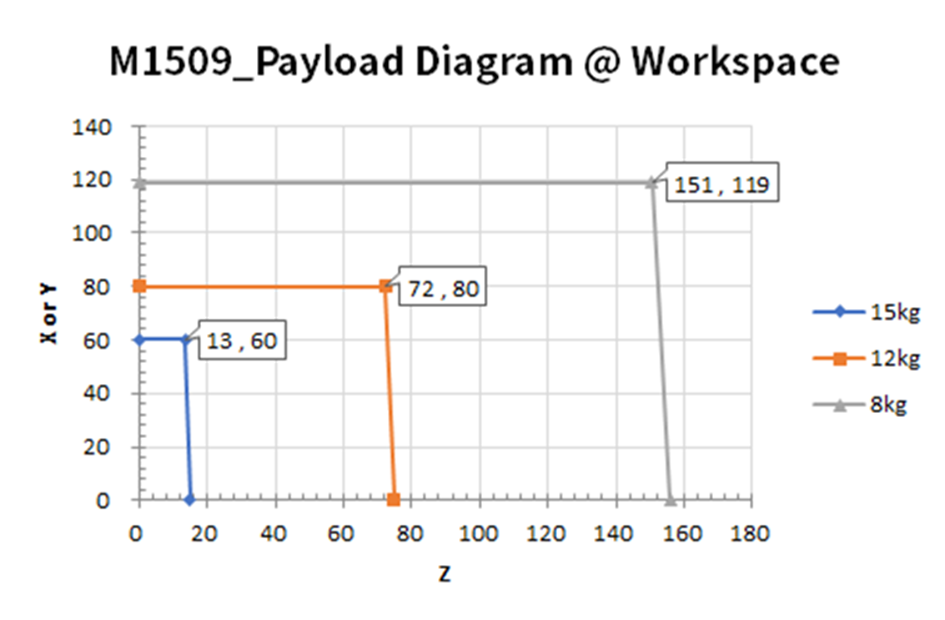
M1509
H2017
H2515
Zulässiges Moment und Trägheitsmoment
Die zulässigen Werte für Moment und Trägheitsmoment für den J4-J6-Roboter sind:
| Modellbezeichnung | J4 | J5 | J6 | |||
|---|---|---|---|---|---|---|
Zulässiges Moment | Trägheitsmoment | Zulässiges Moment | Trägheitsmoment | Zulässiges Moment | Trägheitsmoment | |
M0609 | 36 Nm | 1.6 kg㎡ | 36 Nm | 1.6 kg㎡ | 36 Nm | 1.6 kg㎡ |
M0617 | ||||||
M1013 | ||||||
M1509 | ||||||
H2017 | 145 Nm | 8.0 kg㎡ | 81Nm | 4.5 kg㎡ | 36 Nm | 2.0 kg㎡ |
H2515 | ||||||