
Ausführung auf der Grundlage des Roboterwerkzeugs
Um den Roboter basierend auf dem Roboterwerkzeug zu bewegen, wie folgt vorgehen:
- Registerkarte Task (Aufgabe) im Bildschirm Jog (Verfahren) auswählen.
- „Base“ (Basis) oder „World“ als Anzeigekoordinaten auswählen und Tool (Werkzeug) basierend auf dem Bezugspunkt der Aufgabenkoordinaten festlegen.
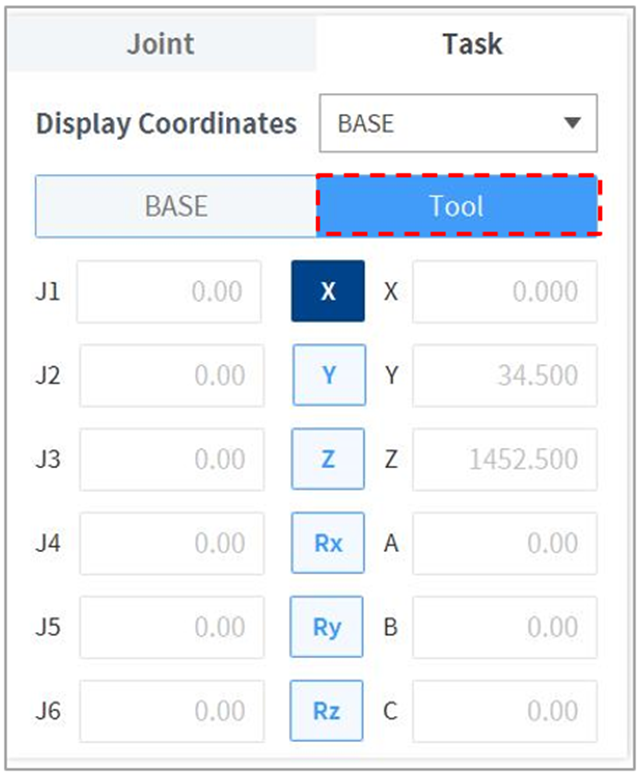
- Die Werkzeugkoordinaten für die Bewegung auswählen.
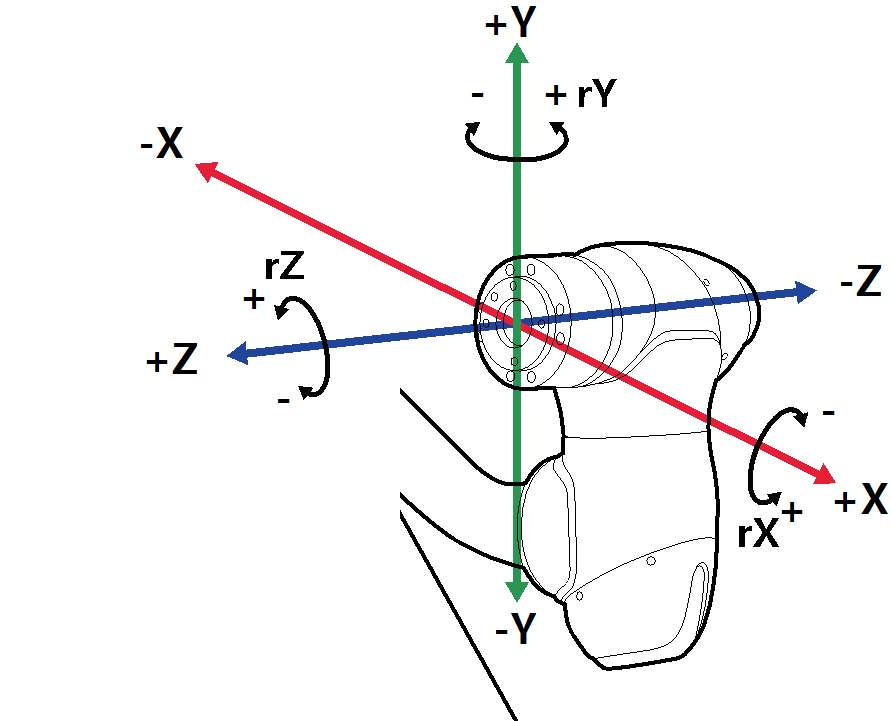
- Die Richtungstaste (


Hinweis
- Im virtuellen Modus findet die Sicherheitszone keine Anwendung.
- Rx, Ry und Rz werden entsprechend dem TCP (tool center position: Werkzeugreferenzpunkt) ausgeführt.