
Recovery Module
Recovery Module: Wenn ein Fehler bei einer anhaltenden Sicherheitsverletzung auftritt oder ein Roboter für den Transport gepackt werden muss, kann der Benutzer den Sicherheitswiederherstellungsmodus verwenden, um die Position und den Winkel des Roboters zu konfigurieren.

Um auf das Recovery-Modul zuzugreifen, tippen Sie auf die Schaltfläche Recovery (Wiederherstellung) unten.
Software-Recovery: Im Status „Servo aus“, wenn eine Fehlersituation aufgrund einer Sicherheitsverletzung durch positionsbezogene Sicherheitsverletzungen, wie z. B. der Roboter, der den Betriebsbereich verlässt oder verbotene Bereiche verletzt, Wenn der Roboter aufgrund einer Kollision mit einem festen Objekt angehalten wird, tritt eine Kraft auf oder wird kontinuierlich angewendet. Servo ein oder Jog kann nicht eingestellt werden, selbst wenn versucht wird, den Roboter mit dem Jog oder Programm in einen normalen Zustand zurückzusetzen. In solchen Fällen wird der Roboter im Software-Recovery auf den Normalzustand zurückgesetzt.
Packaging-Modus: Zum Verpacken und Transportieren des Roboters kann der Roboter für den Transport auf vordefinierte Werte ( die über den normalen Betriebswinkel hinausgehen ) eingestelltwerden.
Wenn der Servo beim Starten des Wiederherstellungsmoduls aktiviert wird, erscheint das folgende Popup und der Servo wird automatisch ausgeschaltet.

Verwenden Des Software-Recovery modus
Software-Recovery modus
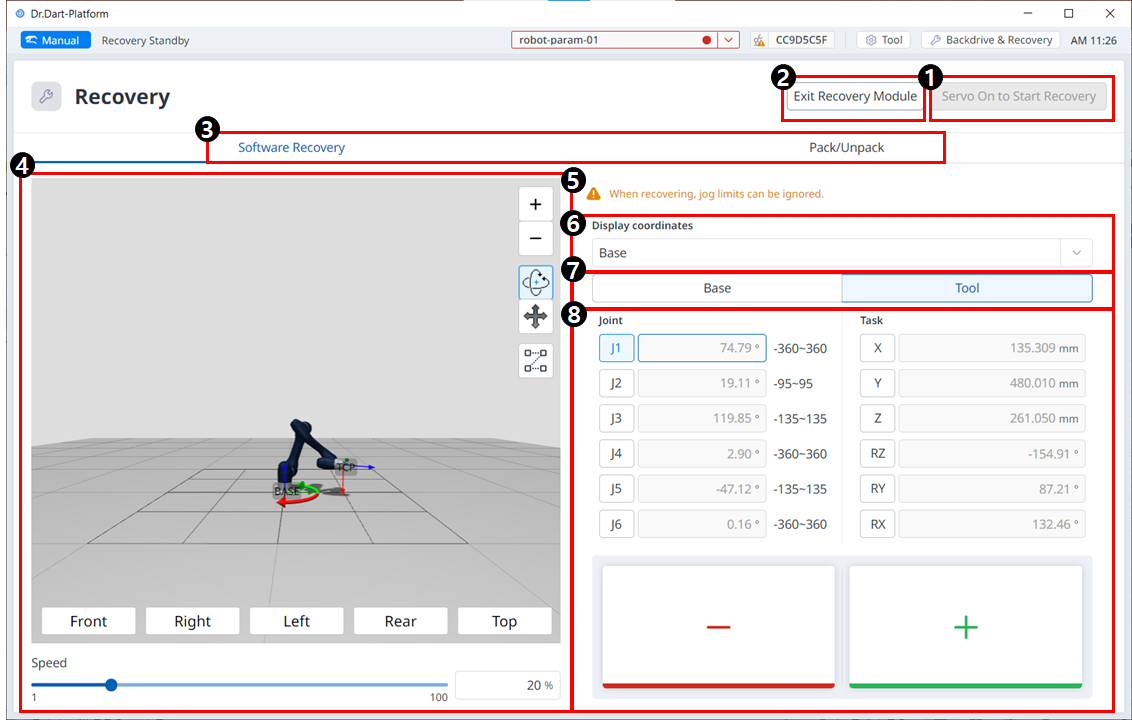
Menü
Artikel | Beschreibung | |
|---|---|---|
| 1 | Servo ON (Servo ein), um die Wiederherstellung zu starten | Dies ist eine Schaltfläche, mit der das Servo vor dem Wechsel in den Wiederherstellungsmodus aktiviert werden kann. |
| 2 | Wiederherstellung Beenden | Mit dieser Schaltfläche können Sie das Wiederherstellungsmodul beenden. |
| 3 | Kopfzeile | In diesem Abschnitt können Sie entweder den Software-Wiederherstellungsmodus oder den Pack-/Entpackungsmodus auswählen. |
| 4 | 3D-Simulation | In diesem Bereich können Sie eine Voranzeige einer 3D-Simulation der festgelegten Werte anzeigen. |
| 5 | Warnmeldung | Dies erklärt die Vorsichtsmaßnahmen. |
| 6 | Koordinaten Anzeigen | Hier können Sie die Koordinate basierend auf Basis oder Welt festlegen. |
| 7 | Basis-/Werkzeug-Taste | Hier können Sie den Wert basierend auf Basis oder Werkzeug festlegen. |
| 8 | Gelenk/Aufgabe (Joint/Task) | In diesem Abschnitt können Sie die gewünschten Werte eingeben, um den Roboter zu bewegen. |
Gehen Sie wie folgt vor, um den Software-Wiederherstellungsmodus zu verwenden:
Tippen Sie auf das Menü Recovery (Wiederherstellung) im Fenster Main Menu(Hauptmenü). Der Bildschirm Software Recovery (Software-Wiederherstellung) wird automatisch im Fenster Recovery(Wiederherstellung) angezeigt.
Tippen Sie auf die einzelnen Verbindungsschaltflächen auf der rechten Seite des Bildschirms Software Recovery (Software-Wiederherstellung), und verwenden Sie
 ,
,  , um die Position festzulegen. Oder drücken Tasten des Cockpits zur Einstellung des Gelenkwinkels durch direktes Teach-in.
, um die Position festzulegen. Oder drücken Tasten des Cockpits zur Einstellung des Gelenkwinkels durch direktes Teach-in.Definitionen der Tasten im Cockpit finden Sie unter Cockpit
Änderungen an der Einstellung werden im Simulationsfenster auf der linken Seite in Echtzeit widergespiegelt.
Wenn die Einstellung abgeschlossen ist, tippen Sie auf die Schaltfläche X oben links, um das Fenster zu schließen.
Vorsicht
Der Reparaturmodus der Software ist nicht verfügbar, wenn die Winkelgrenze der Verbindung um 3 Grad überschritten wird.
Verwenden Von Pack/Unpack
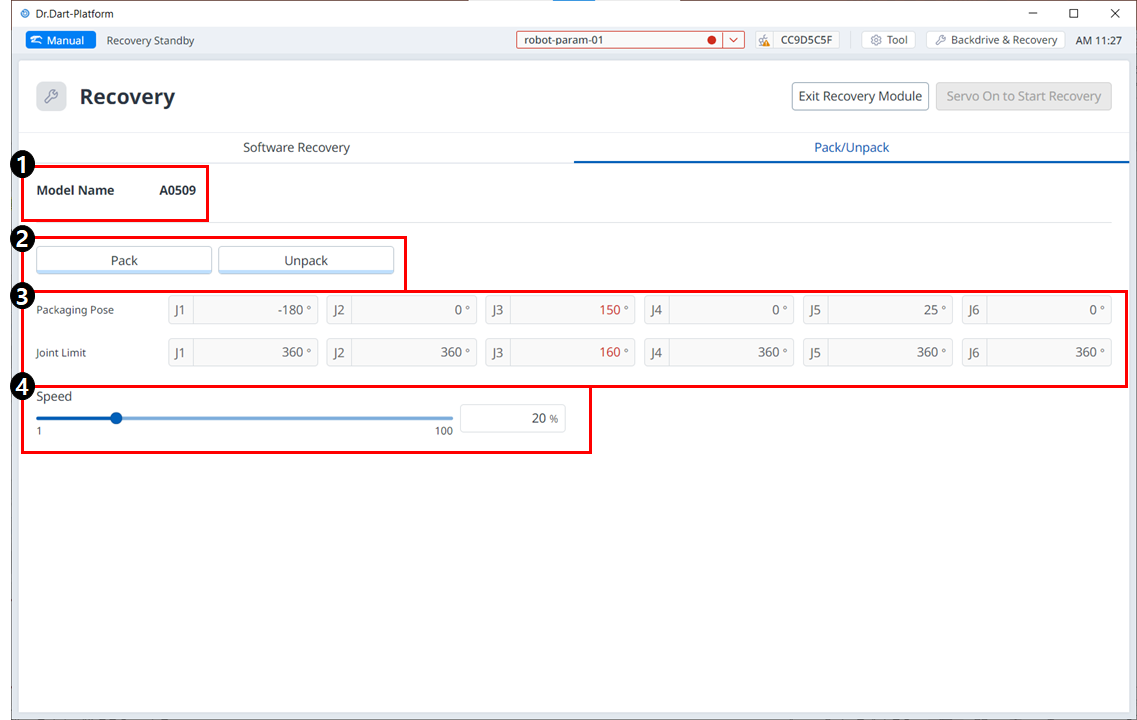
Menü
Artikel | Beschreibung | |
|---|---|---|
| 1 | Modellname | Der Name des verbundenen Robotermodells wird angezeigt. |
| 2 | Packen/Auspacken | Es kann entweder „Packen“ oder „Entpacken“ ausgewählt werden. |
| 3 | Verpackungsstellung/Gelenkgrenze | Die Grenzwerte für die Position und die Verbindung werden angezeigt. |
| 4 | Geschwindigkeitsverhältnis | Die Geschwindigkeit des Pack- oder Entpackungsmodus kann über einen Schieberegler oder eine Eingabe eingestellt werden. |
Gehen Sie wie folgt vor, um den Paketmodus zu konfigurieren:
Tippen Sie im Kopfzeilenbereich auf das Menü Recovery.

Wählen Sie die Registerkarte Packaging Mode (Verpackungsmodus) aus.

Um den Paketmodus zu aktivieren, tippen Sie auf die Schaltfläche ‚Servo ein, um Wiederherstellung zu starten‘.

Der Roboter bewegt sich automatisch in die festgelegte Verpackungsposition.
Mit der Schaltfläche Pack (Verpacken) können Sie den Roboter in die Position Pack (Verpacken) bringen, und mit der Schaltfläche Unpack (Entpacken) können Sie den Roboter in die Position Default Home (Standardstartposition) bringen.