
E/A-Einstellungen
Normaler E/A
Menü
Artikel | Beschreibung | |
|---|---|---|
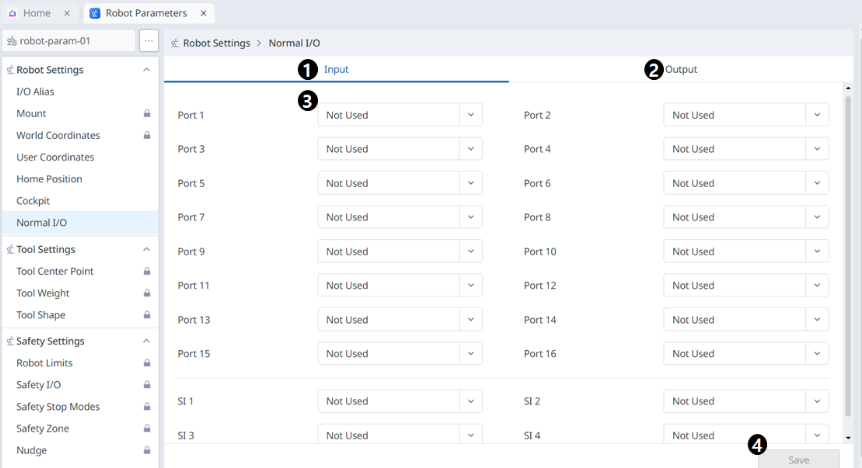
| 1 | Normaler Eingang | In diesem Abschnitt können Sie festlegen, was eingegeben werden soll. |
| 2 | Normale Ausgabe | In diesem Abschnitt können Sie festlegen, was ausgegeben werden soll. |
| 3 | Port-Komponente | Die im Dropdown-Menü aufgeführten Optionen unterscheiden sich für Eingabe und Ausgabe. Für die Eingabe sind die Optionen im Dropdown-Menü für jeden Port: Nicht Belegt Power on (H) Power off (H) For Output, the options in the drop-down menu for each port are: Not Used Safe Operating Stop (L) Normal Speed (L) Reduced Speed (L) Auto Mode (L) Manual Mode (L) Standalone Zone (L) Collaborative Zone (L) High Priority Zone (L) Tool Orientation Limit Zone (L) Designated Zone (L) Task Operating (L) Robot In Motion (L) Mastering Alarm (L) Home Position (L) Deceleration - SS1 SS2 (L) |
| 4 | Speichern | Dadurch können die eingestellten Werte angewendet werden. |
Flansch-E/A-Einstellung
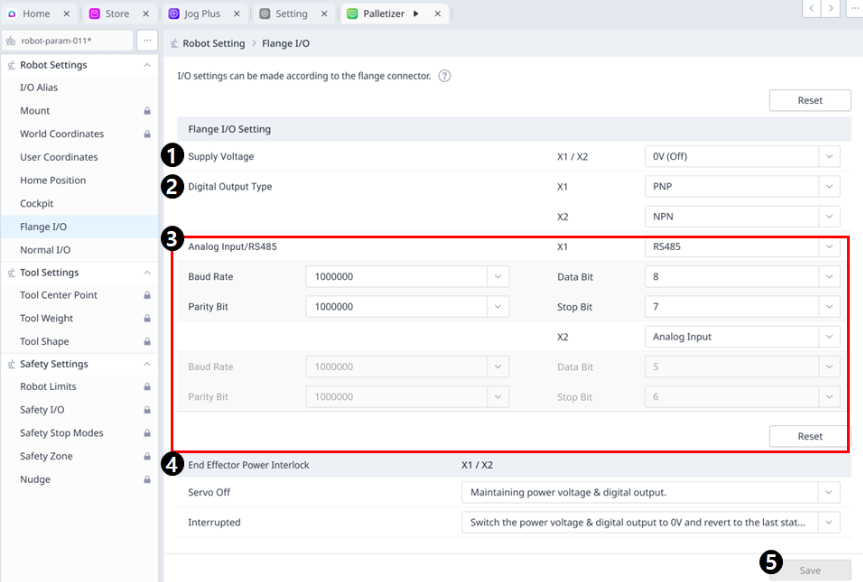
Auf dieses Menü kann nur zugegriffen werden, wenn eine Verbindung zu einem vom Roboter installierten neuen Flansch hergestellt wird.
Menü
Artikel | Beschreibung | |
|---|---|---|
| 1 | Versorgungsspannung |
|
| 2 | Typ Des Digitalen Ausgangs | Bietet die Funktion zum Einstellen des digitalen Ausgangstyps für jeden X1- und X2-Port.
|
| 3 | Einstellung für analogen Eingang/RS485-Modus | Bietet die Möglichkeit, zwischen Analogeingang und RS485 zu wählen.
Wenn Sie „Analoger Eingang“ auswählen,
Bei Auswahl von RS485, Sie können aus den folgenden Optionen wählen
|
| 4 | Endeffektor-Leistungssperre | Bietet eine Funktion zum Festlegen des Betriebs, wenn der Servo ausgeschaltet oder unterbrochen ist.
|
| 5 | Speichern | Dadurch können die eingestellten Werte angewendet werden. |