
Konfiguration und Beschreibung des Robotersystems
Komponentenliste
 |  |
Manipulator | Controller (optional: Siehe Anhang) |
 |  |
Programmierhandgerät | Stromversorgungskabel des Controllers |
 |  |
Anschlusskabel Manipulator | Benutzerhandbuch/Kurzanleitung |
Name der einzelnen Teile und Funktionen
Manipulator
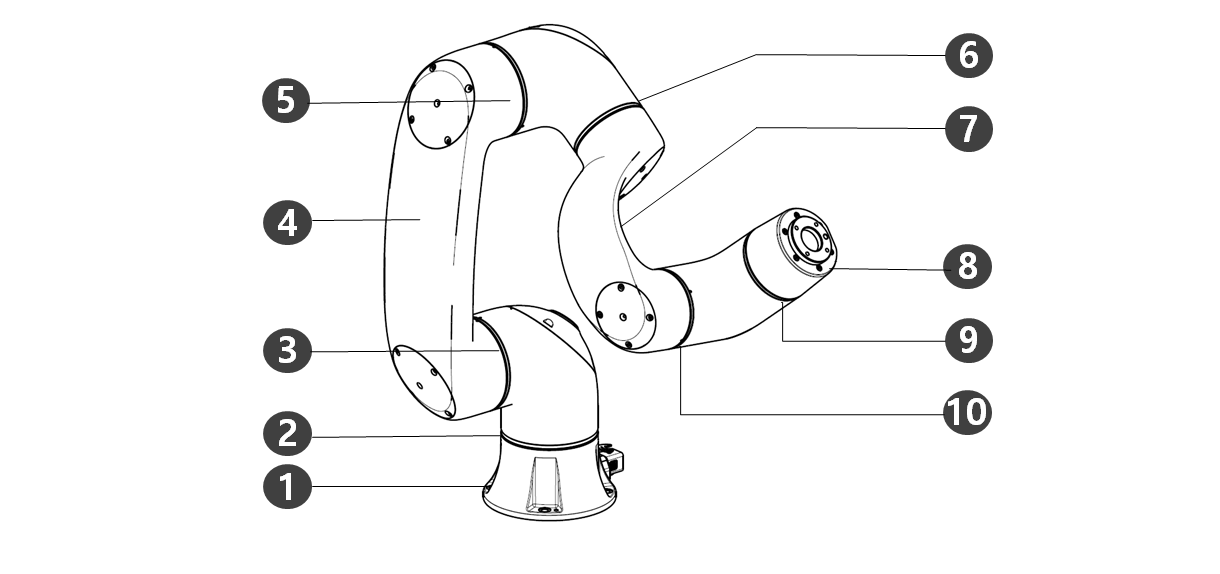
Name der einzelnen Teile
No. | Name | No. | Name |
|---|---|---|---|
1 | Base | 6 | J4 |
2 | J1 | 7 | Link2 |
3 | J2 | 8 | Werkzeugflansch |
4 | Link1 | 9 | J5 |
5 | J3 | 10 | J6 |
ㅤ
Hauptmerkmale
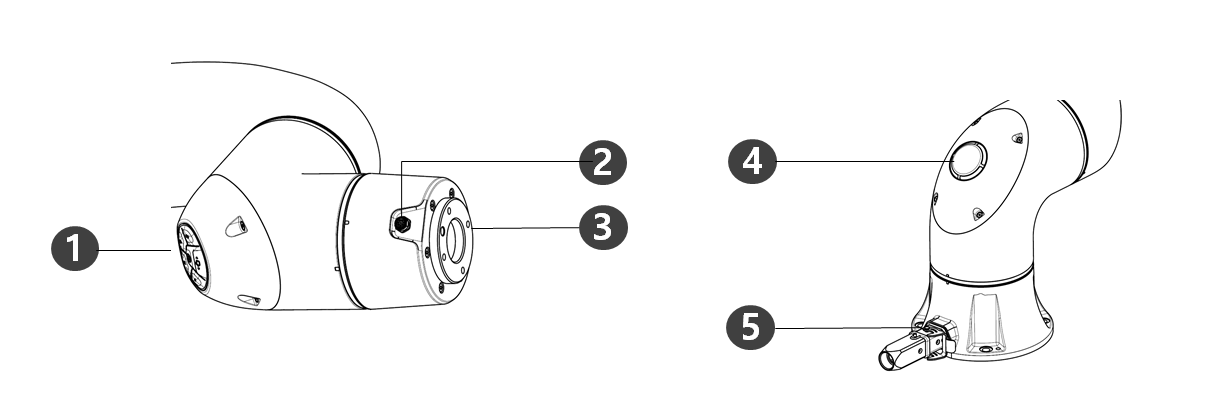
No. | Artikel | Beschreibung |
|---|---|---|
1 | Cockpit | [Option] Controller für direktes Lernen. |
2 | Flansch-E/A | E/A-Anschluss für Werkzeugsteuerung. |
3 | Werkzeugflansch | Bereich für die Montage von Werkzeugen. |
4 | LED | Zeigt den Roboterstatus in verschiedenen Farben an. Weitere Informationen zum Roboterstatus finden Sie unter Status- und Flansch-LED-Farbe für jeden Modus. |
5 | Steckverbinder | Wird für die Stromversorgung und Kommunikation des Roboters verwendet. |
Steuereinheit
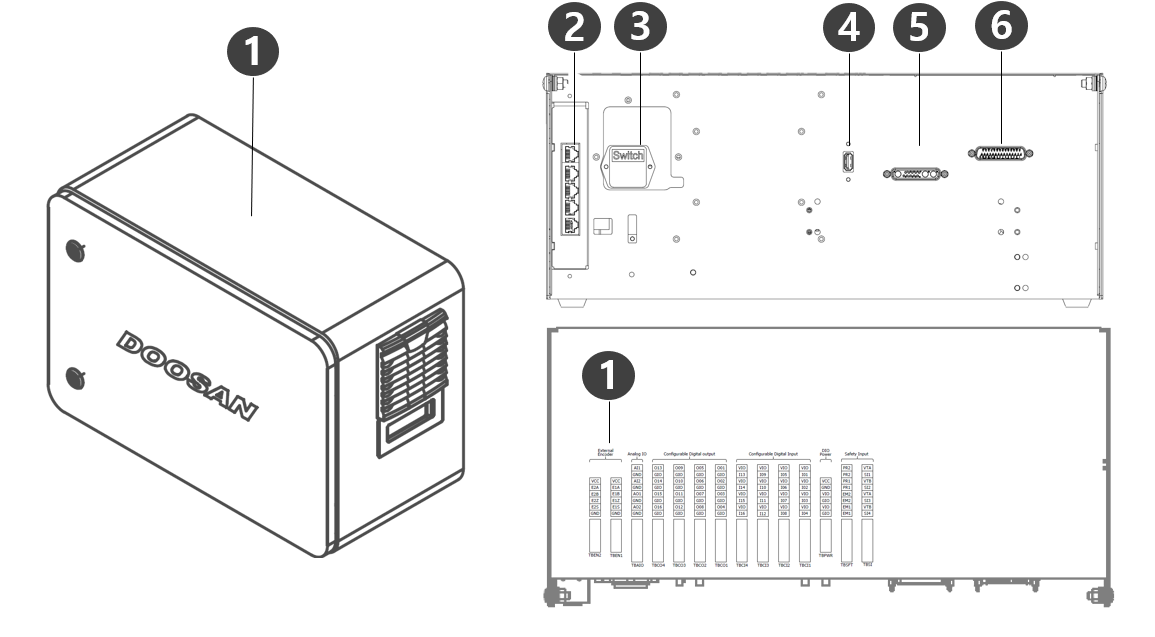
No. | Artikel | Beschreibung |
|---|---|---|
1 | E/A-Anschlussklemme (intern) | Er kann mit Steuerungen oder Peripheriegeräten anderer Roboter verbunden werden. |
2 | Netzwerkverbindungsterminal | Wird für die Verbindung mit dem Netzwerkverbindungsterminal im Controller zur Verwendung von Laptops, TCP/IP-Geräten und Modbus-Geräten verwendet. |
3 | Stromanschluss/-Schalter | Dient zum Anschließen der Stromversorgung des Controllers zum ein- oder Ausschalten. Weitere Informationen finden Sie unter Schalten Sie das System ein/aus. |
4 | USB-Anschlussklemme | Dient zum Speichern von Protokollen, die erstellt wurden, während der Roboter im USB-Speicher arbeitet, oder zum Exportieren und Importieren von Aufgaben. |
5 | Anschlussklemme des Manipulatorkabels | Dient zum Anschluss des Manipulatorkabels an das Steuergerät. |
6 | Anschlussklemme des Hängekabels programmieren | Dient zum Anschließen des Programmierkabels an das Steuergerät. |
Systemkonfiguration
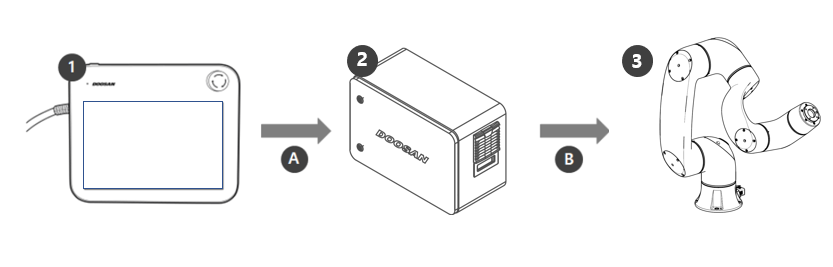
No. | Name | Beschreibung |
|---|---|---|
1 | Programmierhandgerät | Dieses Gerät verwaltet das gesamte System und ist in der Lage, die Roboterpositionen zu lernen oder Einstellungen für die Manipulatoren und Steuergeräte vorzunehmen. |
2 | Steuereinheit | Er steuert die Bewegung des Roboters entsprechend der vom Programmierhandgerät eingestellten Position oder Bewegung. Es verfügt über verschiedene E/A-Ports, die den Anschluss und die Verwendung verschiedener Geräte und Geräte ermöglichen. |
3 | Manipulator | Es handelt sich um einen industriellen kollaborativen Roboter, der Transport- oder Montageaufgaben mit verschiedenen Werkzeugen ausführen kann. |
A | Befehl/Überwachung | |
B | Stromversorgung/Netzwerk |