
Messmethoden und -Bedingungen
Der Anhalteweg ist der zurückgelegte Winkel ab dem Zeitpunkt, an dem ein Stoppsignal eingeht, bis zu dem Zeitpunkt, an dem alle Handhabungsautomat stillstehen.
Die Anhaltezeit ist die Zeit ab dem Zeitpunkt, an dem ein Stoppsignal eingeht, bis zu dem Zeitpunkt, an dem alle Handhabungsautomat stillstehen.
Anhalteweg- und Anhaltezeitdaten werden für Gelenk 1, Gelenk 2 und Gelenk 3, die große Weglängen aufweisen, angegeben.
Die Bewegung einer überlappenden Achse kann einen längeren Anhalteweg bewirken.
Die Daten für die Stopfstrecke und die Stopfzeit sind gemäß KS B ISO 10218-1:2011 Deklaration und Zertifizierung definiert.
Stoppkategorie
Stoppkategorie | Beschreibung | |
|---|---|---|
| 1 | Stoppkategorie 0 | Der Anschlagweg und die Anschlagzeit von Gelenk 1 (Base), Gelenk 2 (Shoulder) und Gelenk 3 (Elbow) werden bei maximaler Geschwindigkeit, Dehnungsebene und Last gemessen. Die Achsen von Gelenk 2 und Gelenk 3 sind parallel zueinander, so dass ein Aufprall, der durch erzwungenes Anhalten auf einem Teil verursacht wird, zu einem Schlupf auf der anderen Seite führen kann. Die Winkelabweichung wird ebenfalls gemessen. |
| 2 | Stoppkategorie 1 | Der Stoppweg und die Stoppzeit von Gelenk 1 (Base) und Gelenk 2 (Shoulder) werden bei 33 %, 66 % bzw. 100 % der maximalen Geschwindigkeit, des Streckniveaus und der Last gemessen. Der Stoppweg und die Stoppzeit von Gelenk 3 (Elbow) werden bei 33 %, 66 % und 100 % der maximalen Geschwindigkeit und Last gemessen. Der Dehnungsgrad während der Messung von Gelenk 3 ist aufgrund der Länge des unteren Arms und des vollständig flachen Handgelenks auf maximalem Niveau fixiert. |
Messstellungen und -Bedingungen
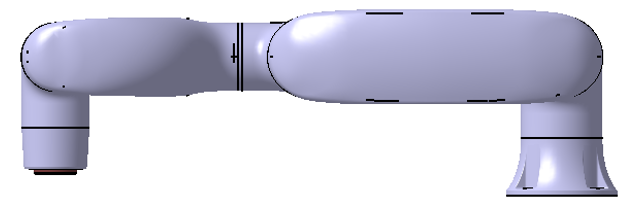
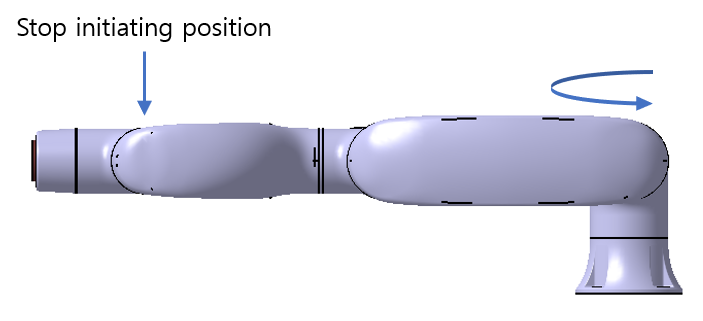
Die Messung von Gelenk 1 wird mit der Drehachse senkrecht zum Boden und während der horizontalen Bewegung durchgeführt.
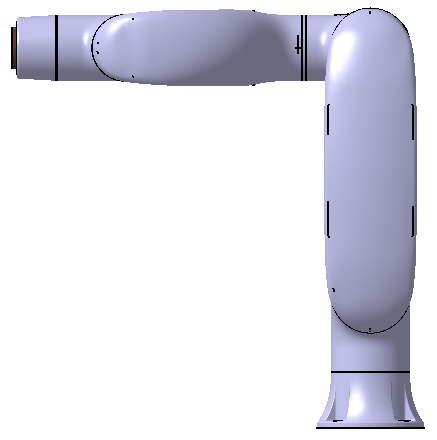
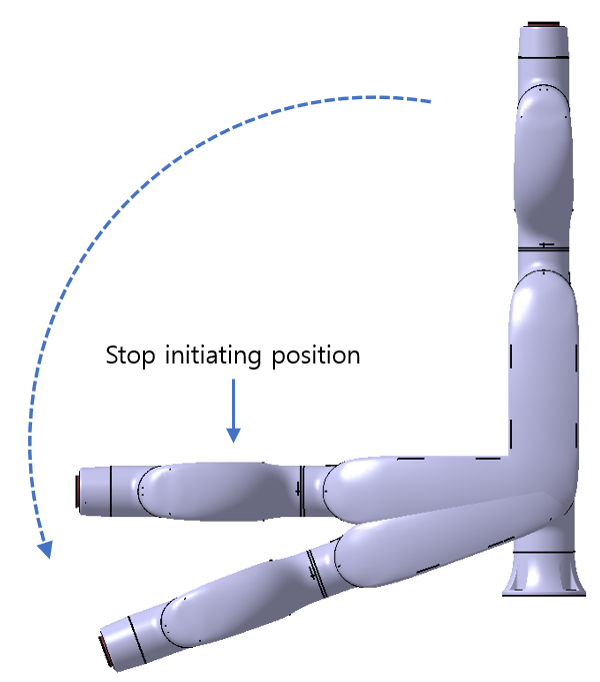
Die Messungen von Gelenk 2 und Gelenk 3 werden mit der Drehachse parallel zum Boden durchgeführt und wenn der Roboter in einer Abwärtsbewegung senkrecht zum Boden angehalten wird.
Hinweis
Die Messungen sind das Ergebnis des Worst Case. Die Messung kann je nach Umständen variieren
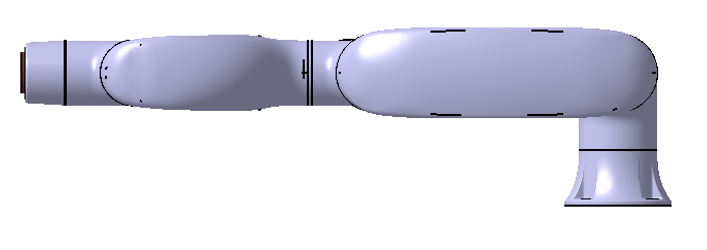
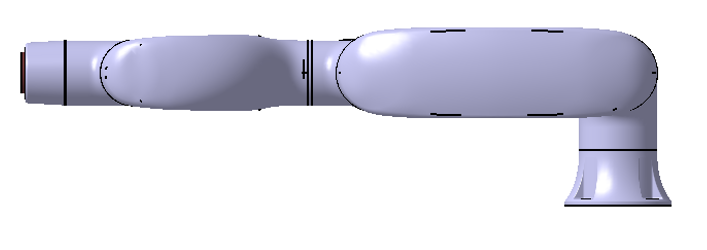
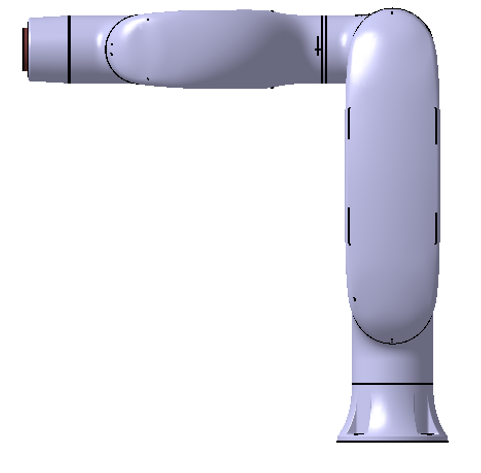
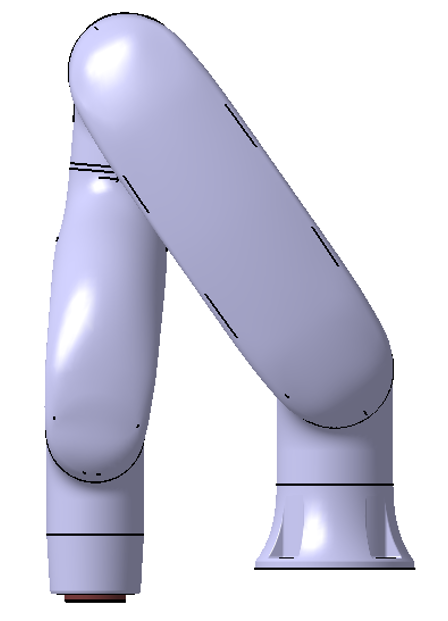
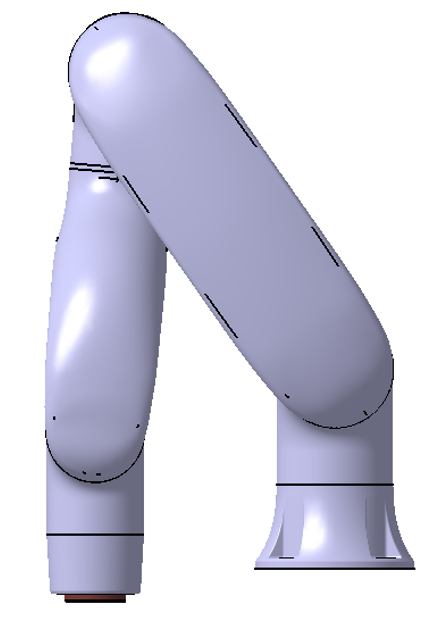
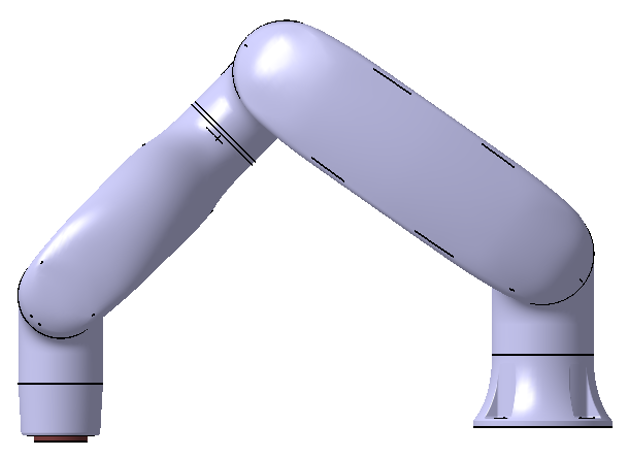
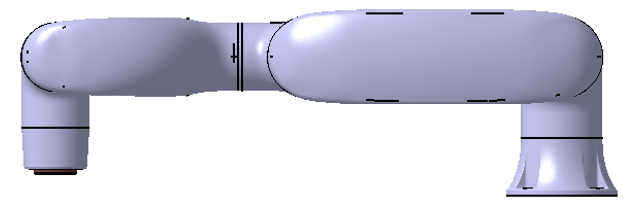
Die Pose für 33 %, 66 % und 100 % der Verlängerung
| Gelenk 1 | Gelenk 2 | Gelenk 3 |
100 % Verlängerung Stoppkategorie 0 |
 |
 |
 |
33 % Verlängerung Stoppkategorie 1 |
 |
 |
- |
66 % Verlängerung Stoppkategorie 1 |
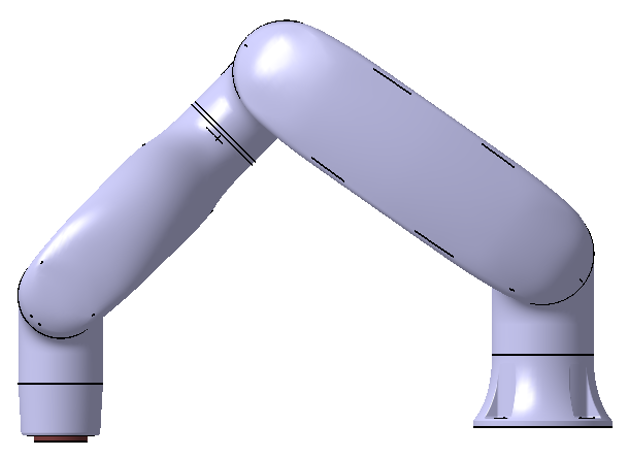 |
 |
- |
100 % Verlängerung Stoppkategorie 1 |
 |
 |
 |
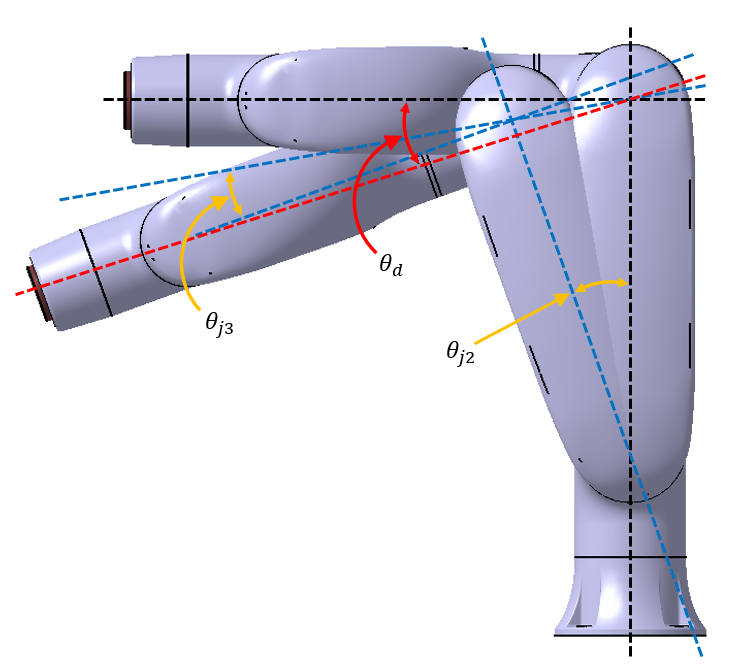
Die Position, bei der der Stopp eingeleitet wird, und der gemessene Winkel (θd)
Posieren, wenn der Stopp eingeleitet wird | Gemessener Winkel | |
Joint1 |
 | Rutschfest,
|
Joint2 |
 |
 |
Joint3 |
 |
 |