Anschließen Externer Geräte
Anschließen Externer Geräte – Vision Sensor
Der Roboter kann mit einem Bildverarbeitungssensor (2D-Kamera für Objektpositionsmessungen) verbunden werden, und Bildverarbeitungssensormessungen können über ein Netzwerk an den Roboter übertragen werden, um eine Verknüpfung mit Befehlen des Roboters herzustellen.
Einstellung Des Vision-Sensors
Einstellung Der Kommunikationsverbindung
Schließen Sie die LAN-Ports der Geräte an, und übertragen Sie Messungen des Vision-Sensors per TCP/IP-Kommunikation an den Roboter. (Siehe Netzwerkverbindung) Stellen Sie die IP-Adresse des Vision-Sensors auf TCP/IP 192.168.137.xxx-Band ein, um TCP/IP-Kommunikation zu ermöglichen.
Einstellung Des Vision-Work
Um die Objektpositionsmessung durchzuführen, ist eine Bildeingabe und ein Lernprogramm des Zielobjekts mithilfe des Bildverarbeitungssensors erforderlich. Siehe das spezielle Einstellprogramm für die Vision-Arbeit, das vom Hersteller des Bildverarbeitungssensor bereitgestellt wird.
Einstellung Für Das Format Der Messdaten
Um Messdaten des Vision-Sensors in der Roboterarbeit zu verwenden, ist es erforderlich, die Koordinaten des Vision-Roboters zu kalibrieren. Dies muss vor Beginn der Arbeiten mit dem Einstellprogramm des Vision-Sensors durchgeführt werden. Die Messdaten des Vision-Sensors müssen mit folgenden Formateinstellungen übertragen werden:
Format | Pos. | , | X | , | y | , | Winkel | , | Var1 | , | Var2 | , | … |
|---|
pos: Trennzeichen für den Beginn der Messdaten (Präfix)
X: X-Koordinatenwert des Objekts, gemessen mit dem Bildverarbeitungssensor
y: Y-Koordinatenwert des Objekts, gemessen mit dem Bildverarbeitungssensor
Winkel: Rotationswinkelwert des Objekts, gemessen mit dem Bildverarbeitungssensor
Var1 … Varn: Informationen gemessen mit Bildverarbeitungssensor (Beispiel: Objektabmessung/Defektprüfwert) Pos.,254.5,-38.1,45.3,1,50.1 (Beschreibung: X=254,5, y=-38,1, Winkel=145,3, var1=1, var2=50,1)
Roboterprogrammeinstellung
Wenn die physische Kommunikationsverbindung zwischen dem Vision-Sensor und dem Roboter und dem Vision-Sensor abgeschlossen ist, muss ein Programm eingerichtet werden, das die Verknüpfung von Vision-Sensor und Roboterprogramm ermöglicht. Es ist möglich, Funktionen des externen Bildverarbeitungssensors mit Doosan Robot Language (DRL) zu verbinden, zu kommunizieren und zu steuern, und das Programm kann im Task Writer eingerichtet werden.
Einzelheiten und umfassende Beispiele der Doosan Robotersprache (DRL) zu Funktionen des externen Vision-Sensors finden Sie im Programmierhandbuch.
Anschließen eines externen Geräts – DART-Platform
Die DART-Platform ist eine Software, die auf einem Desktop oder Laptop mit Windows-Betriebssystem ausgeführt wird. Sobald der Controller und der Desktop/Laptop über den LAN-Port verbunden sind, stehen ab dem Zeitpunkt der Ausführung der DART-Plattform alle Funktionen des Programmierhandgeräts zur Verfügung. Zu diesem Zeitpunkt ist das folgende Einrichtungsverfahren erforderlich, um eine Verbindung mit Sub-Controllern innerhalb des Controllers herzustellen.
IP-Adresssuche und Verbindungseinstellung
Einstellung Der Kommunikationsverbindung
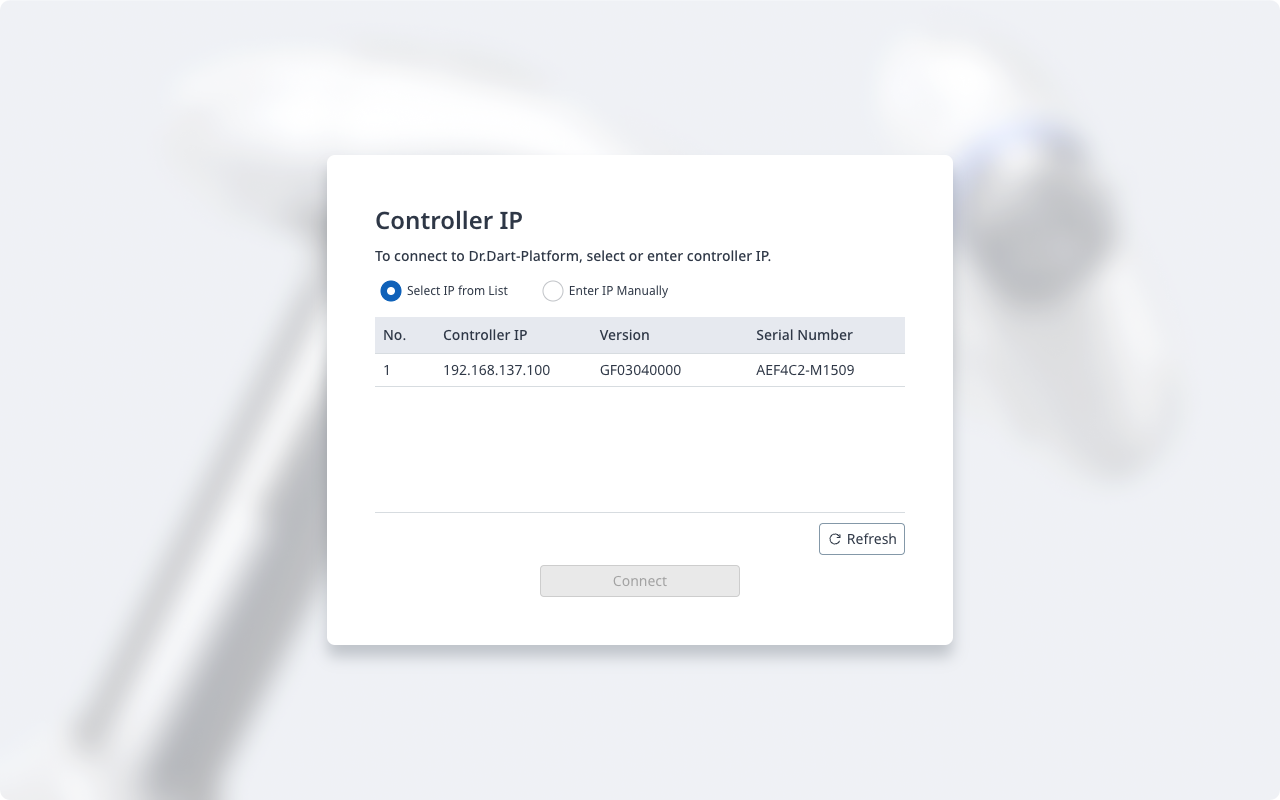
Wenn die DART-Plattform ausgeführt wird, nachdem der Laptop mit dem LAN-Port des Controllers verbunden wurde, werden automatisch die IP-Adresse des Controllers, die Versionsinformationen des Sub-Controllers und die für den Verbindungsaufbau erforderliche Roboterseriennummer gesucht.
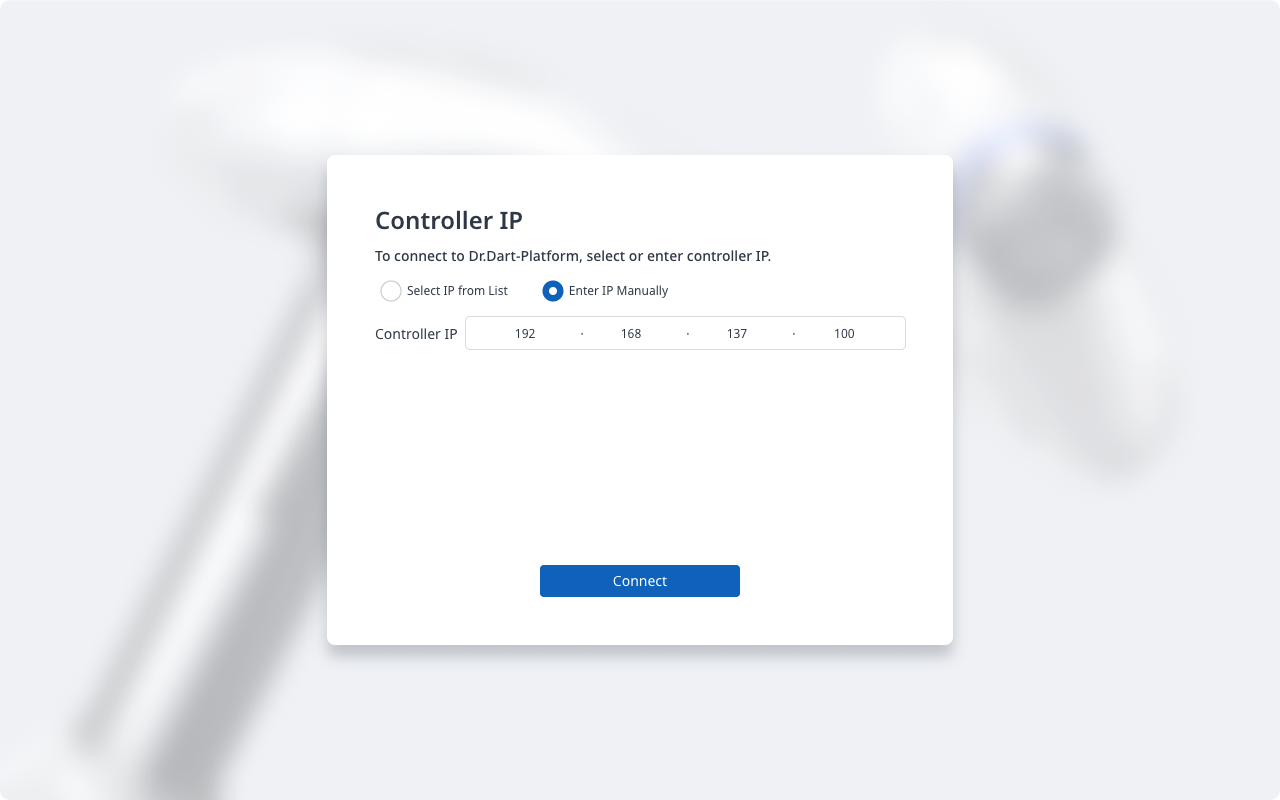
Wenn die Suche fehlschlägt, drücken Sie zum Aktualisieren die Schaltfläche Aktualisieren oder tippen Sie auf IP manuell eingeben, um die IP-Adresse des Controllers manuell einzugeben.
Durch Auswahl der Seriennummer des zu verbindenden Roboters und Drücken der Schaltfläche Verbinden wird eine Verbindung zwischen der DART-Plattform und dem Sub-Controller hergestellt und der Roboter kann normal betrieben werden.
Wenn es ein Problem mit der Verbindung gibt, versuchen Sie das unten beschriebene Verfahren. Wenn dieses Problem jedoch weiterhin besteht, wenden Sie sich an das Vertriebs- oder Servicepersonal, um Unterstützung zu erhalten.
Wenn die Suchergebnisse für die IP-Adresse des verbindbaren Controllers, die Versionsinformationen des Sub-Controllers und die Seriennummer des Roboters nicht angezeigt werden: Klicken Sie auf die Schaltfläche Aktualisieren, um erneut zu suchen und erneut zu versuchen, eine Verbindung gemäß dem oben beschriebenen Verfahren herzustellen.
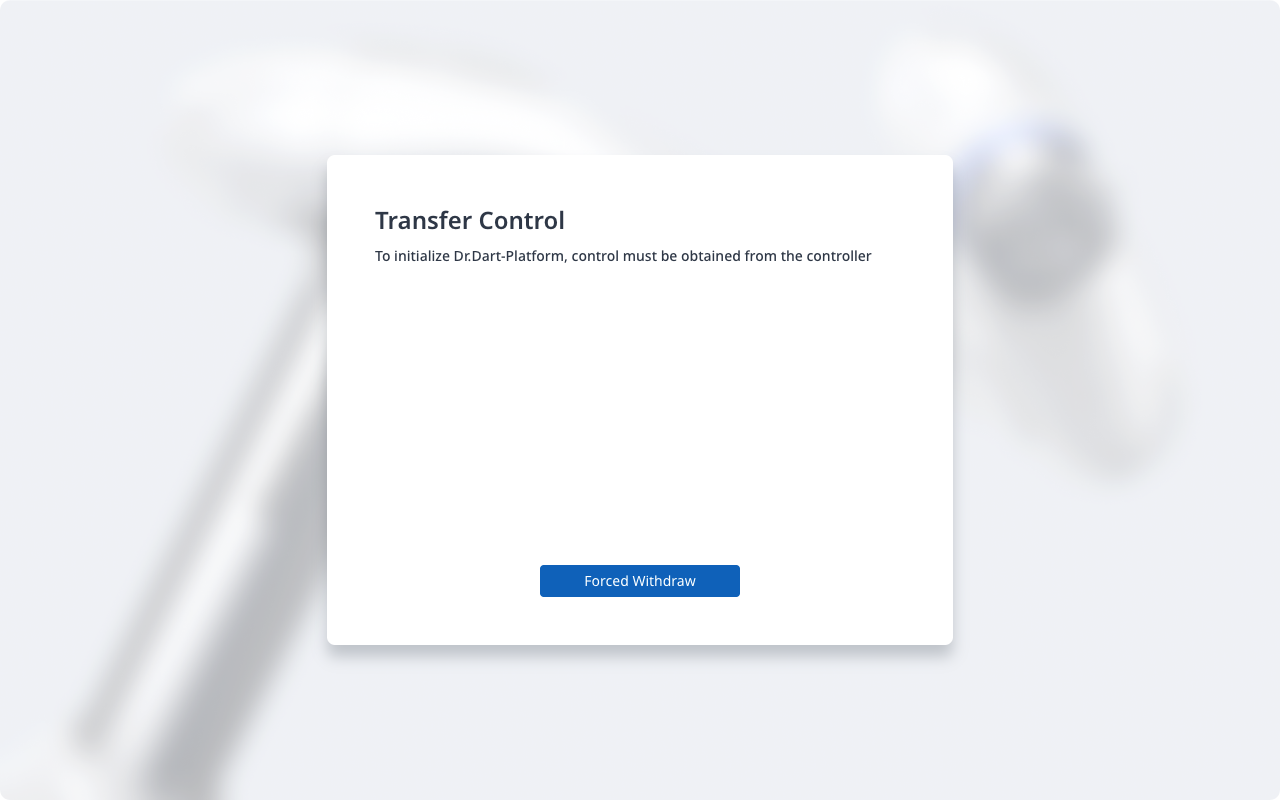
Wenn die Seite Übertragungssteuerung wie unten gezeigt angezeigt wird, tippen Sie auf die Schaltfläche „erzwungenes Zurückziehen“, um eine Verbindung zur Plattform herzustellen.