
Flansch-E/A
Die Endflanschabdeckung des Roboters verfügt über einen 8-poligen M8-Steckverbinder, und siehe Abbildung unten für Position und Form.
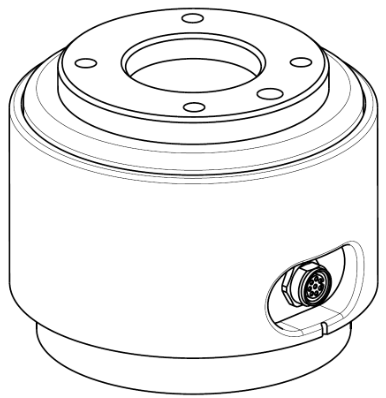
Der Steckverbinder liefert Strom- und Steuersignale, die für den Betrieb des Greifers oder der Sensoren in bestimmten Roboterwerkzeugen erforderlich sind. Nachfolgend finden Sie Beispiele für Industriekabel (es können gleichwertige Kabel verwendet werden):
Phoenix Contact 1404178, Stecker (gerade)
Phoenix Contact 1404182, Stecker (rechtwinklig)
Schematische Darstellung
Die Pin-Zuordnung jedes Steckverbinders ist wie folgt:
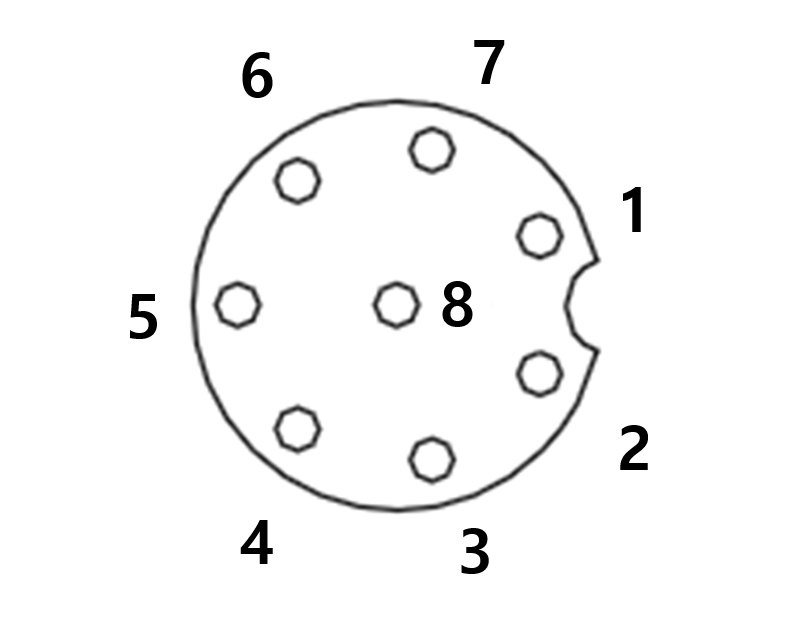
In der folgenden Tabelle finden Sie eine detaillierte E/A-Konfiguration, die vom X1-Anschluss bereitgestellt wird.
X1-Einstellung
No. | Signaltyp | Beschreibung |
|---|---|---|
1 | Digitaleingang 1 | PNP (Quelltyp, Standard) |
2 | Digitalausgang 1 | Auf PNP (Quelltyp, Standard) oder NPN (Sink Type) setzen |
3 | Digitalausgang 2 | Auf PNP (Quelltyp, Standard) oder NPN (Sink Type) setzen |
4 | Analogeingang 1 / RS-485 + | Stellen Sie entweder auf Spannung (0–10 V) oder Strom (4–20 mA, Standard) / max. Baudrate 1M ein |
5 | Leistung | Stellen Sie die interne Stromversorgung auf +24V (Standard), +12V oder 0V ein |
6 | Analogeingang 2 / RS-485 - | Stellen Sie entweder auf Spannung (0–10 V) oder Strom (4–20 mA, Standard) / max. Baudrate 1M ein |
7 | Digitaleingang 2 | PNP (Quelltyp, Standard) |
8 | MASSE |
Die Anfangsleistung des Flanscheingangs/-Ausgangs (E/A) ist auf 24 V eingestellt und kann auf 0 V oder 12 V eingestellt werden
In der folgenden Tabelle finden Sie detaillierte Leistungsspezifikationen während der E/A-Verbindung.
Parameter | Min | Typ | Max | Einheit |
|---|---|---|---|---|
Versorgungsspannung (12V-Modus) | 11,4 | 12 | 12,6 | V |
Versorgungsspannung (24V-Modus) | 22,8 | 24 | 25,2 | V |
Versorgungsstrom | - | - | 1,5 | A |
Warnung
Stellen Sie das Werkzeug und den Greifer so ein, dass sie keine Gefahren darstellen, wenn sie beim Abschalten der Stromversorgung Gefahren verursachen.
(Z. B. vom Werkzeug fallendes Werkstück)Die Klemme Nr. 5 jedes Steckverbinders liefert 24 V, während der Roboter mit Strom versorgt wird. Stellen Sie daher sicher, dass Sie die Stromversorgung zum Roboter unterbrechen, wenn Sie das Werkzeug und den Greifer einrichten.
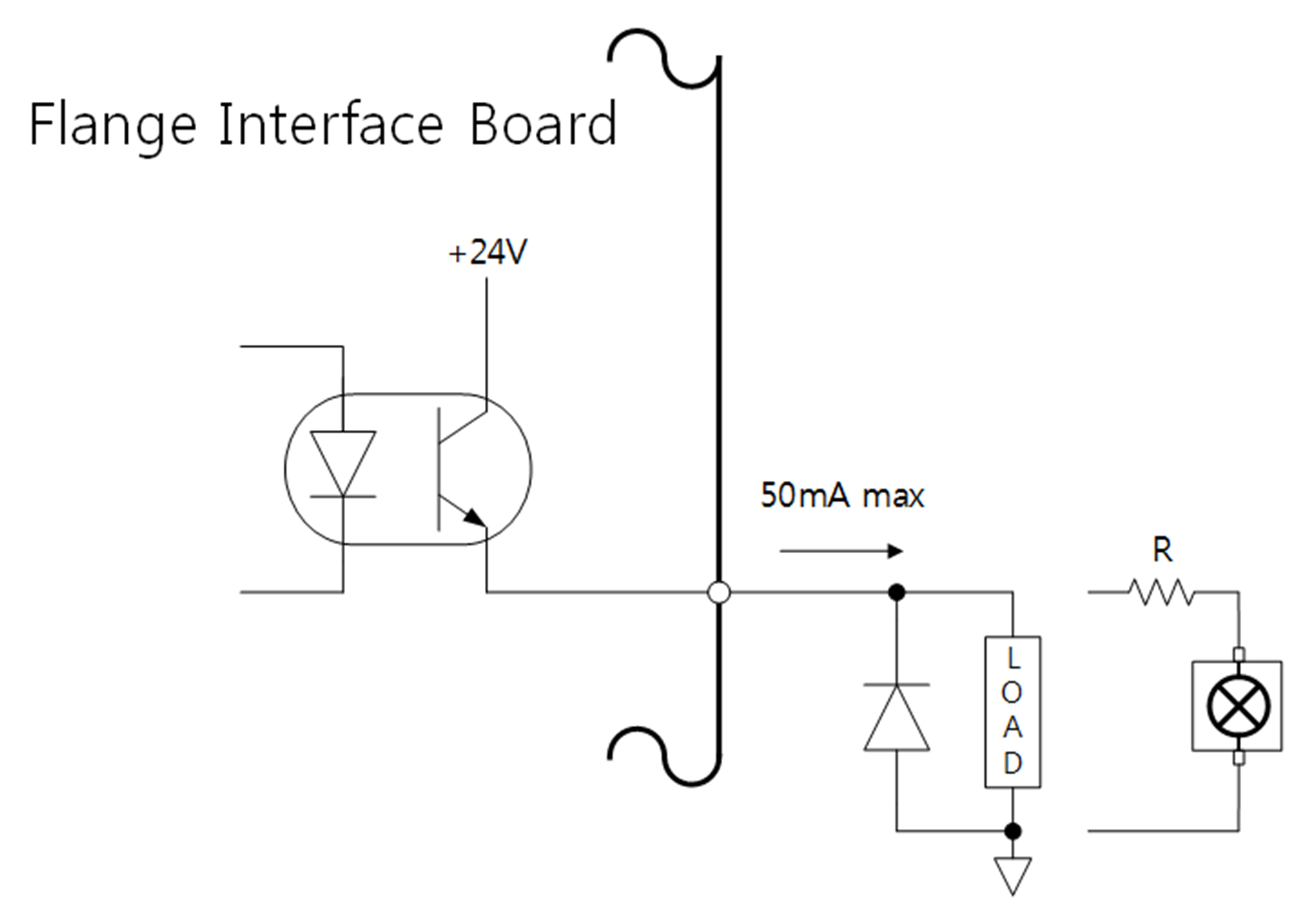
Technische Daten Des Digitalen Flanschausgangs
Der digitale Flansch-Ausgang ist eine PNP-Spezifikation, und der Fotokoppler-Ausgang wird im Ausgang eingerichtet.
Der entsprechende Ausgangskanal wird +24V, wenn der Digitalausgang aktiviert wird. Wenn der Digitalausgang deaktiviert ist, ist der Status des entsprechenden Ausgangskanals offen (frei).
Die elektrischen Spezifikationen des Digitalausgangs lauten wie folgt:
Parameter | Min | Typ | Max | Einheit |
|---|---|---|---|---|
Spannung beim Antrieb von 10mA | 23 | - | - | V |
Spannung beim Antrieb von 50mA | 22,8 | - | 23,7 | V |
Strom während der Fahrt | 0 | - | 50 | MA |
Die Einstellung wurde seit dem 11. April 2024 wie folgt geändert
Digitale OU-Ausgänge unterstützen zwei unterschiedliche Modi:
Modus | Aktiv | Inaktiv |
|---|---|---|
PNP (Quelltyp, Standard) | Hoch | Öffnen |
NPN (mit Spüle) | Niedrig | Öffnen |
Die Anfangsleistung des Flanscheingangs/-Ausgangs (E/A) ist auf 24 V eingestellt und kann auf 0 V oder 12 V eingestellt werden
Der entsprechende Ausgangskanal wird zu ++12V oder ++24V, wenn der Digitalausgang aktiviert wird.
Wenn der Digitalausgang deaktiviert ist, ist der Status des entsprechenden Ausgangskanals offen (frei).
Die elektrischen Spezifikationen des Digitalausgangs lauten wie folgt:
Parameter | Min | Typ | Max | Einheit |
|---|---|---|---|---|
Spannung beim Fahren des 12V-Modus | 11,4 | 12 | 12,6 | V |
Spannung beim Fahren des 24V-Modus | 22,8 | 24 | 25,2 | V |
Strom während der Fahrt | 0 | - | 50 | MA |
Vorsicht
Der digitale Ausgang unterliegt keiner aktuellen Beschränkung. Das Ignorieren der oben angegebenen Spezifikationen während des Betriebs kann zu dauerhaften Schäden am Produkt führen.
Die folgende Abbildung zeigt ein Beispiel für die Einrichtung eines digitalen Ausgangs. Beachten Sie diese beim Anschließen des Werkzeugs und des Greifers.
Stellen Sie sicher, dass der Roboter beim Einrichten des Stromkreises von der Stromversorgung getrennt wird.
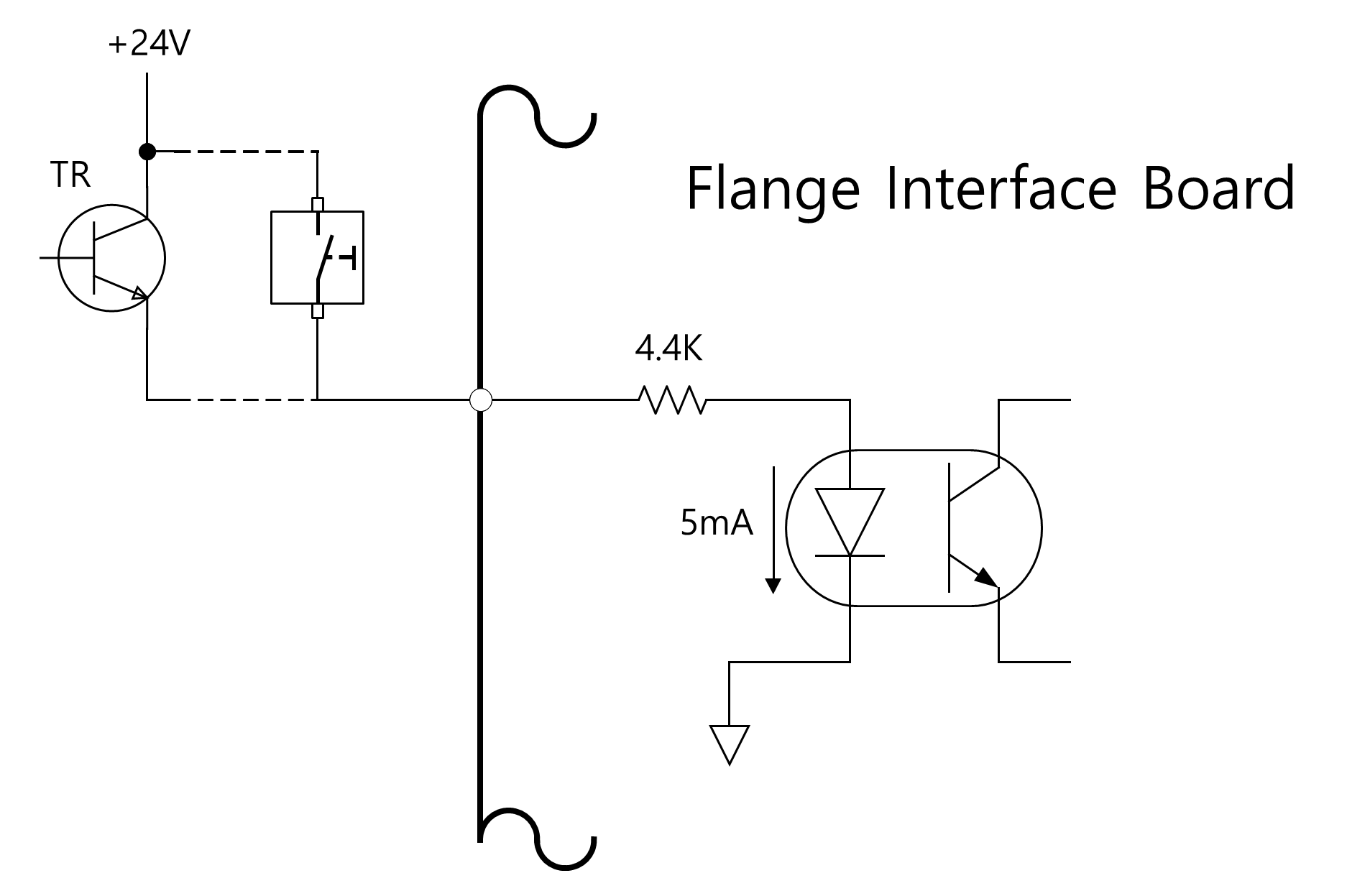
Spezifikationen Für Flansch-Digitaleingang
Der digitale Flanscheingang verfügt über einen Fotokopplereingang.
Der Strom, der auf dem 24-V-Eingang basiert, wird durch den internen Widerstand auf 5mA begrenzt.
Die elektrischen Daten des Digitaleingangs lauten wie folgt:
Parameter | Min | Typ | Max | Einheit |
|---|---|---|---|---|
Eingangsspannung | 0 | - | 26 | V |
Logisch hoch | 4,4 | - | - | V |
Logischer Tiefpunkt | 0 | - | 0,7 | V |
Eingangswiderstand | - | 4,4k | - | Ω |
Vorsicht
Die folgende Abbildung zeigt ein Beispiel für die Einrichtung eines digitalen Eingangs. Beachten Sie diese beim Anschließen eines Eingabegeräts.
Stellen Sie sicher, dass der Roboter beim Einrichten des Stromkreises von der Stromversorgung getrennt wird.
Spezifikationen Für Analogen Flansch
Empfängt Spannungs- oder Stromsignale von externen Geräten.
Der Analogeingang kann auf Spannung (0-10 V) oder Strom (4-20 mA) eingestellt werden.
Die elektrischen Daten sind unten aufgeführt.
Parameter | Min | Typ | Max | Einheit |
|---|---|---|---|---|
Eingangsspannung im Spannungsmodus | 0 | - | 10 | V |
Eingangsstrom im Strommodus | 4 | - | 20 | MA |
Auflösung | - | 12 | - | Bit |