Was ist ein Roboter?
Funktionsgrenzen der einzelnen Roboterserien
Die verschiedenen Roboterserien (A, AS, E, M/H, P) beschränken die Verwendung von Funktionen wie folgt:
Strombasis: Strom des Motors an jedem Gelenk wird verwendet.
FTS-basiert: Es wird ein FTS (Kraft-Drehmoment-Sensor) verwendet, der sich am Ende des Roboters befindet.
JTS-basiert: Es wird JTS (Gelenkdrehmomentsensor) verwendet, der sich an jedem Gelenk befindet.
Funktionen | Serie A/E (strombasiert) | A-Serie S (Strom, FTS-basiert) | Serie M (JTS-basiert) | H-Serie (JTS-basiert) | Serie P (JTS-basiert) |
|---|---|---|---|---|---|
Direktes Lehren
| O | O (strombasiert) | O | O | O |
Direktes Lehren
| X | O (FTS-basiert) | O | O | O |
Kollisionserkennung | O | O (strombasiert) | O | O | O |
Installation Der Positionsmessung | X | O (FTS-basiert) | O | X(der Roboter kann nur auf dem Boden installiert werden) | X(der Roboter kann nur auf dem Boden installiert werden) |
Werkzeuggewichtsmessung | X | O (FTS-basiert) | O | O | O |
Messung Des Werkstückgewichts | X | O (FTS-basiert) | O | O | O |
Funktion Anstoßen | X | X | O | O | O |
Kraftsteuerung | O (Einstellung nur in drei Verschiebungsrichtungen verfügbar, mit Ausnahme der Drehung) | O (FTS-basiert) | O | O | O |
Compliance-Kontrolle | O (Einstellung nur in drei Verschiebungsrichtungen verfügbar, mit Ausnahme der Drehung) | O (FTS-basiert) | O | O | O |
Funktionale Grenzen der Kraftüberwachung für jede Roboterserie
Das Programmierhandgerät und DART-Studio können zur Überwachung von Kraftdaten verwendet werden. Der DRL-Befehl (Check_force_condition()) kann auch zur externen Überwachung von Force-Daten verwendet werden.
Wenn der Palettiermodus auf „EIN“ eingestelltist: Die gleichen Steuerungs-/Überwachungsfunktionen sind im AUSGESCHALTETEN Zustand verfügbar, mit Ausnahme von Robotern der H- und P-Serie.
Funktionen | Serie A/E (strombasiert) | A-Serie S (Strom- und FTS-basiert) | Serie M (JTS-basiert) | H-Serie (JTS-basiert) | Serie P (JTS-basiert) |
|---|---|---|---|---|---|
Kraftsteuerung | O (Einstellung nur in drei Verschiebungsrichtungen verfügbar, ohne Drehung) | O (FTS-basiert) | O | O | O |
O (wenn der Palettiermodus auf „EIN“ eingestellt ist: Ausgang Kraftsteuerung begrenzt (Base Rx, Ry Ausrichtung) 1)) | O (wenn der Palettiermodus auf „EIN“ eingestellt ist: Ausgang Kraftsteuerung begrenzt (Base Rx, Ry Ausrichtung) 1)) | ||||
Compliance-Kontrolle | O (Einstellung nur in drei Verschiebungsrichtungen verfügbar, ohne Drehung) | O (FTS-basiert) | O | O | O |
O (wenn der Palettiermodus auf „EIN“ eingestellt ist: Ausgang der Compliance-Kontrolle begrenzt (Base Rx, Ry Ausrichtung) 1)) | O (wenn der Palettiermodus auf „EIN“ eingestellt ist: Ausgang der Compliance-Kontrolle begrenzt (Base Rx, Ry Ausrichtung) 1)) | ||||
Überwachung erzwingen (Programmierhandgerät) | X | O (FTS-basiert) | O (Kraftwert von „0“ wird für den Abschnitt Singularität angezeigt) | O (Kraftwert von „0“ wird für den Abschnitt Singularität angezeigt) | O (Kraftwert von „0“ wird für den Abschnitt Singularität angezeigt) |
O (wenn der Palettiermodus auf „EIN“ eingestellt ist: 4 Freiheitsgrade für die Basis (x, y, z, Rz)) | O (wenn der Palettiermodus auf „EIN“ eingestellt ist: 4 Freiheitsgrade für die Basis (x, y, z, Rz)) | ||||
Überwachung erzwingen (DART-Studio) | O (Kraftwert von „0“ wird für den Abschnitt Singularität angezeigt) | O (FTS-basiert) | O (Kraftwert von „0“ wird für den Abschnitt Singularität angezeigt) | O (Kraftwert von „0“ wird für den Abschnitt Singularität angezeigt) | O (Kraftwert von „0“ wird für den Abschnitt Singularität angezeigt) |
O (wenn der Palettiermodus auf „EIN“ eingestellt ist: 4 Freiheitsgrade für die Basis (x, y, z, Rz)) | O (wenn der Palettiermodus auf „EIN“ eingestellt ist: 4 Freiheitsgrade für die Basis (x, y, z, Rz)) | ||||
Überwachung erzwingen (Bei Verwendung von DRL-Befehlen: | O (Kraftwert von „0“ wird für den Abschnitt Singularität angezeigt) | O (FTS-basiert) | O (Kraftwert von „0“ wird für den Abschnitt Singularität angezeigt) | O (Kraftwert von „0“ wird für den Abschnitt Singularität angezeigt) | O (Kraftwert von „0“ wird für den Abschnitt Singularität angezeigt) |
O (wenn der Palettiermodus auf „EIN“ eingestellt ist: 4 Freiheitsgrade für die Basis (x, y, z, Rz)) | O (wenn der Palettiermodus auf „EIN“ eingestellt ist: 4 Freiheitsgrade für die Basis (x, y, z, Rz)) |
Ausgangsgrenze der Steuerung (Base Rx, Ry-Ausrichtung): Die Kraft- oder Compliance-Kontrollwerte, die den Kraft- oder Compliance-Kontrollwerten entsprechen, die der Ausrichtung Base Rx, Ry entsprechen, werden nicht ausgegeben. Die Eingabe des Kraft- oder Compliance-Kontrollwerts der relevanten Achse (Base Rx, Ry) wird als „0“ ignoriert.
Überblick über Singularität
Singularität in einem Mehrgelenkroboter bezieht sich auf eine Position (oder Punkt in einem Mehrgelenkroboter bezieht sich auf eine Position (oder einen Punkt), bei der der Roboter Schwierigkeiten hat, seine nächste Position während der Bewegung zu berechnen. Mehrgelenkroboter berechnen jeden Gelenkwinkel während der Bewegung basierend auf dem Roboterende
Zum Beispiel in Abb. 1 wenn sich der Roboter unten zum roten Punkt bewegt, kann der Roboter nicht bestimmen, ob seine Gelenke in Stellung A oder Stellung B bewegt werden sollen, wie in Abb. gezeigt. 2. Diese Position (oder dieser Punkt) wird als Singularität bezeichnet.
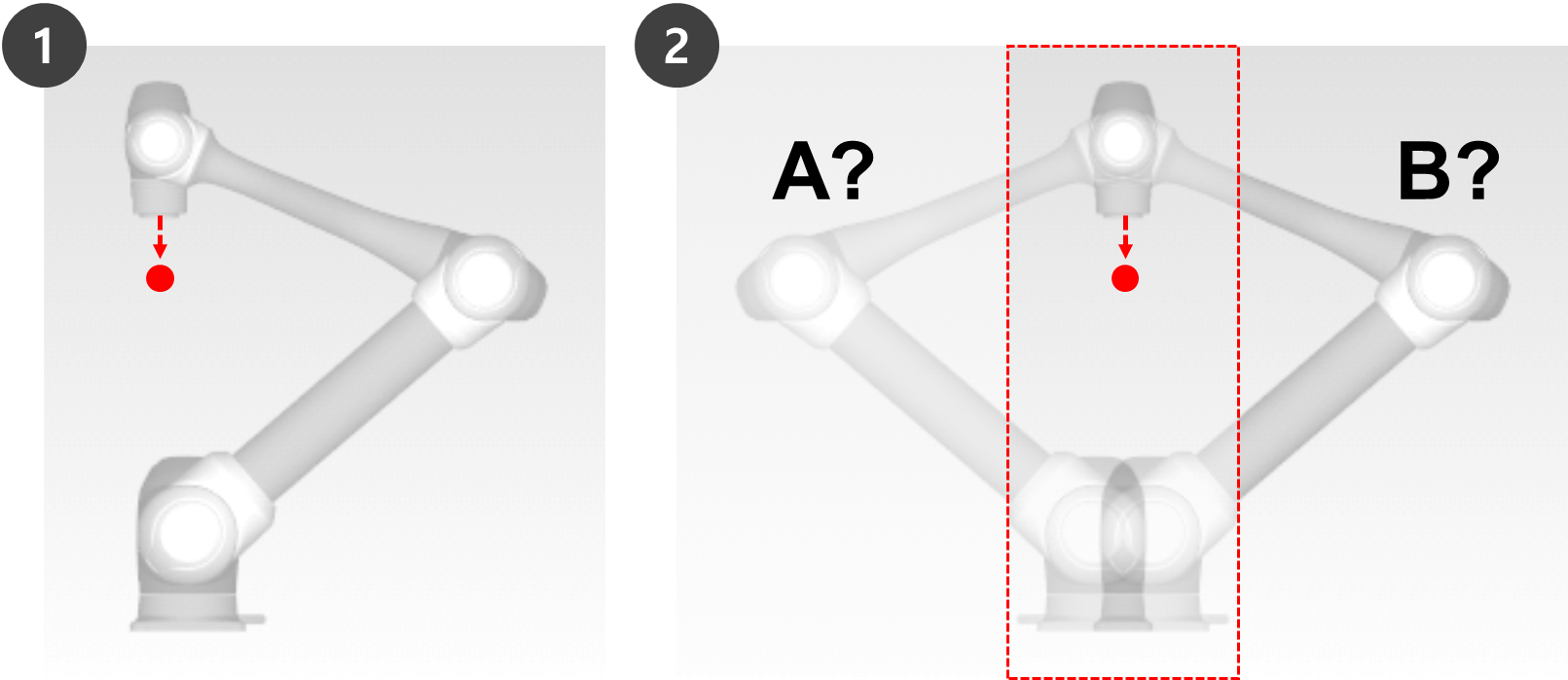
Fast eine Singularität erreicht, ist die Roboterbewegung in Bezug auf Ebene, Punkt und Linie nicht flüssig, die lineare Bewegung des Roboterendes wird möglicherweise nicht beibehalten, und der Positionsfehler während der Steuerung kann zunehmen. Singularität tritt in 3 Fällen auf, wie in der folgenden Abbildung gezeigt, einschließlich wenn die Roboterverbindungen eine Linie bilden.
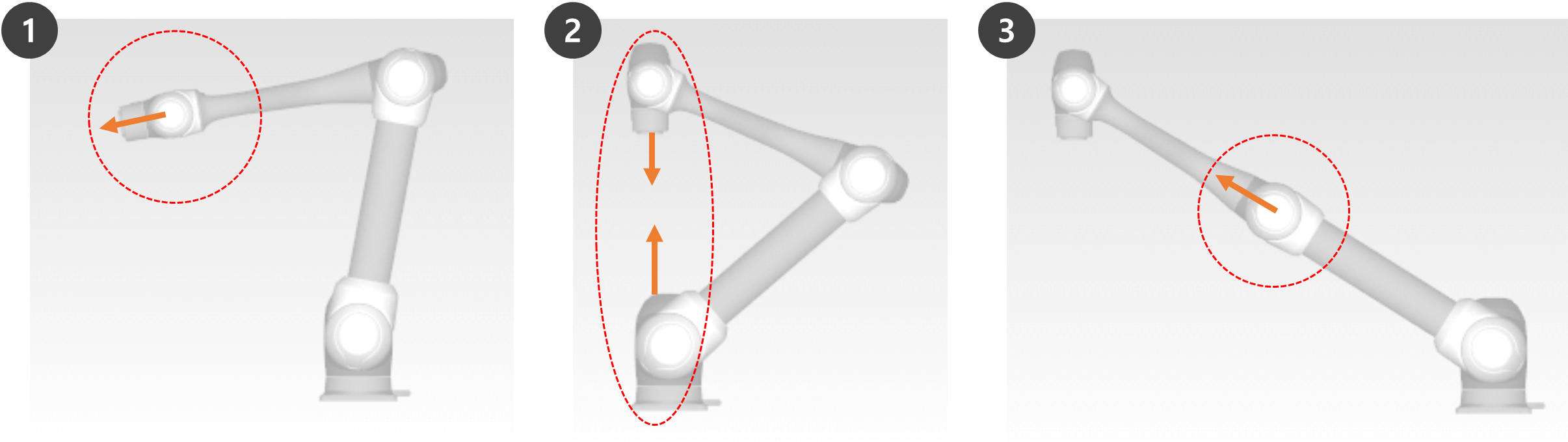
Singularität Des Wrist Wenn das Robotergelenk eine Linie bildet, während sich Achse 5 0° nähert
Im Vergleich zu einem menschlichen Arm entsprechen die Achsen 4, 5 und 6 dem Handgelenk.
Singularität Des Shoulder: Wenn sich die Achsen 1 und 6 auf derselben Linie befinden
Im Vergleich zu einem menschlichen Arm entsprechen die Achsen 1 und 2 dem Schultergelenk.
Singularität Des Elbow: Wenn der Roboter eine Linie bildet, während sich Achse 3 0° nähert
Im Vergleich zu einem menschlichen Arm entspricht Achse 3 dem Ellenbogen.
Vorsicht
Manuelle und automatische Operationen, die sich mit Gelenkdrehung bewegen, werden nicht durch Singularität beeinflusst.
Bewegung von Aufgaben, Befehl „MoveL“ usw.
Singularität tritt nur beim manuellen und automatischen Betrieb auf, wenn der Roboter eine lineare Bewegung ausführt.
Gelenkbewegung, MoveJ-Befehle usw.
In der Singularitätszone ist keine Kraft- oder Compliance-Kontrolle verfügbar.
Da die Rotationsgeschwindigkeit bestimmter Achsen schnell zunimmt, wenn eine lineare Bewegung eine Singularität passiert, kann es vorkommen, dass eine Überschreitung der Verbindungsgeschwindigkeitsbegrenzung oder der Verbindungswinkelbegrenzung auftritt.
So vermeiden Sie Singularität
Roboter von Doosan Robotics bieten Optionen zur Vermeidung von Singularitäten während der Bewegungssteuerung. Es wird jedoch empfohlen, eine Aufgabe zu konfigurieren, die keine Ausnahmen mit Verbindungsbewegungsbefehlen wie MoveJ in Singularitätszonen erstellt.
Hier sind die Optionen zur Vermeidung von Singularität, die von Doosan Robot bereitgestellt werden:
Automatische Vermeidung: Führt Bewegungen durch Vermeidung von Singularitäten aus. Die Roboterbewegung kann jedoch vom erwarteten Pfad abweichen.
Pfadpriorität: Behält Pfad und Geschwindigkeit bei, kann jedoch aufgrund eines Fehlers in der Nähe einer Singularität gestoppt werden.
Variable Drehzahl: Behält den Pfad bei, verlangsamt sich aber nahe einer Singularität.
Übersicht über den Euler-Winkel
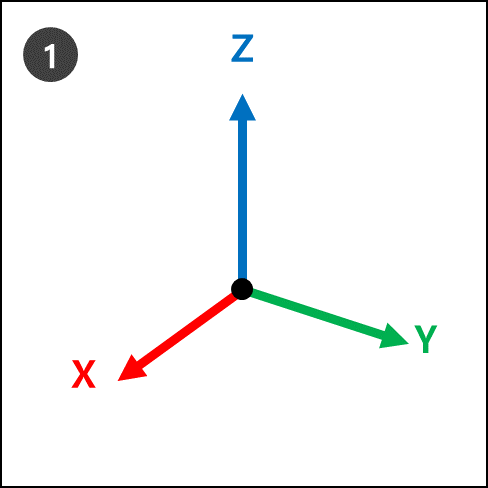
Der Euler-Winkel ist eine Möglichkeit, die Winkel der X-, Y- und Z-Achsen auszudrücken, die in der Objektrichtung senkrecht zueinander liegen. A, B und C beziehen sich auf die sequenziellen Rotationswinkel. Jeder Roboterhersteller definiert diese A-, B- und C-Rotationsreihenfolge unterschiedlich, z. B. Rz-Ry-Rz, Rz-Ry-Rx oder Rx-Ry-Rz.
Beispiel : Rz-Ry-Rx. Hier bedeutet Rz die Rotation in der Z-Achse, Ry die Rotation in der Y-Achse und Rx die Rotation in der X-Achse. RZ kann als Winkel A, Ry als Winkel B und Rx als Winkel C ausgedrückt werden, um die aktuelle Drehrichtung eines Objekts anzugeben. Beachten Sie, dass nach der Drehung in Z-Achsenrichtung von den Koordinaten aus Drehungen auf der Grundlage neuer Koordinaten vorgenommen werden.
Dies kann mit den Schritten 1 bis 4 dargestellt werden.
 |
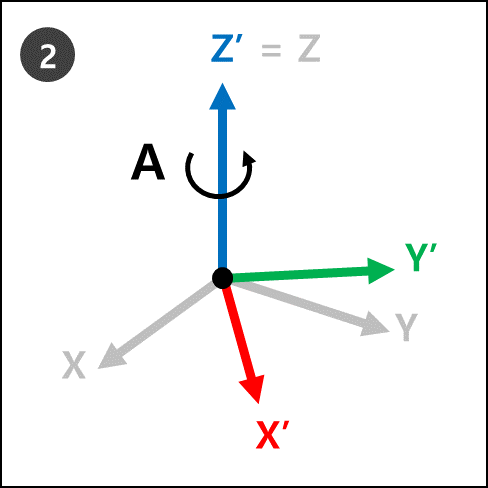 |
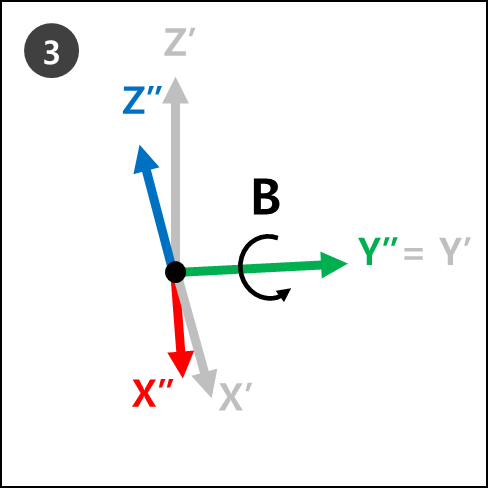 |
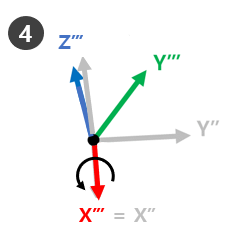 |
Die neuen Koordinaten (Z’’’, Y’’’, X’’’ von Schritt 4 beziehen sich auf die aktuelle Roboterrotation, wenn die Eulerwinkel A, B und C angewendet werden.
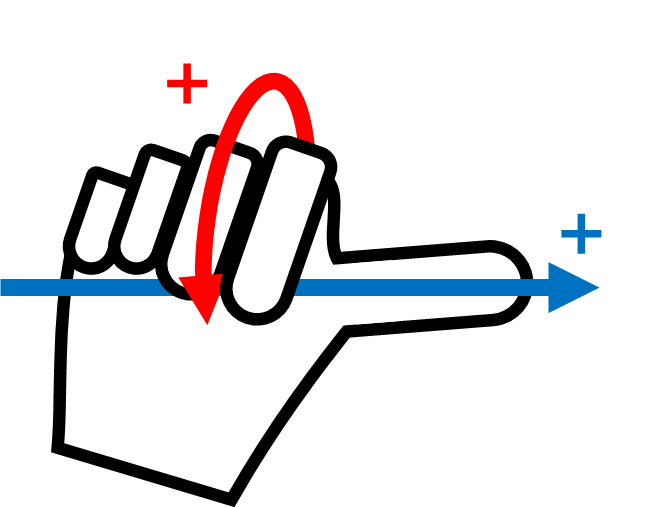
Dies lässt sich leicht mit der rechten Hand visualisieren. Stellen Sie die folgende Pose mit der rechten Hand. Dies wird als Rechtsregel bezeichnet. Wenn Daumen (X-Achse), Zeigefinger (Y-Achse) und Mittelfinger (Z-Achse) senkrecht zueinander stehen, werden Koordinaten erstellt, die aus X-, Y- und Z-Achsen bestehen.
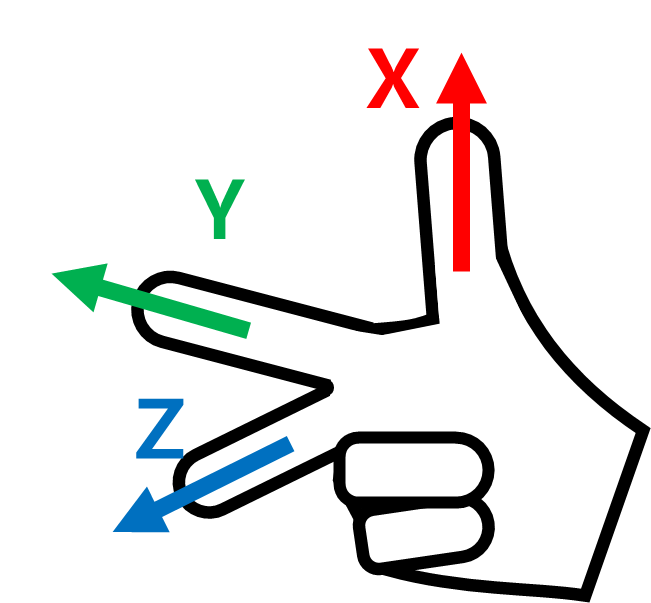
Machen Sie dann die kartesische Position der rechten Regel und drehen Sie Rz, Ry und Rx in der Reihenfolge.
Rz: Drehen Sie den Mittelfinger (Z-Achse) um Einen Grad.
Ry: Drehen Sie den Zeigefinger (Y-Achse) um B Grad.
Rx: Drehen Sie den Daumen (X-Achse) um C Grad.
Hinweis
Die +-Drehrichtung der +-Drehrichtung von A, B und C ist die Richtung von vier Fingern mit Ausnahme des Daumens, wenn der Daumen auf die +-Richtung zeigt und die vier Finger geballt sind. Dies wird als Gesetz der rechtsdrehenden Schraube bezeichnet.