Erstinbetriebnahme
Controller einschalten
OBLIGATORISCH EINFACH 1 MIN
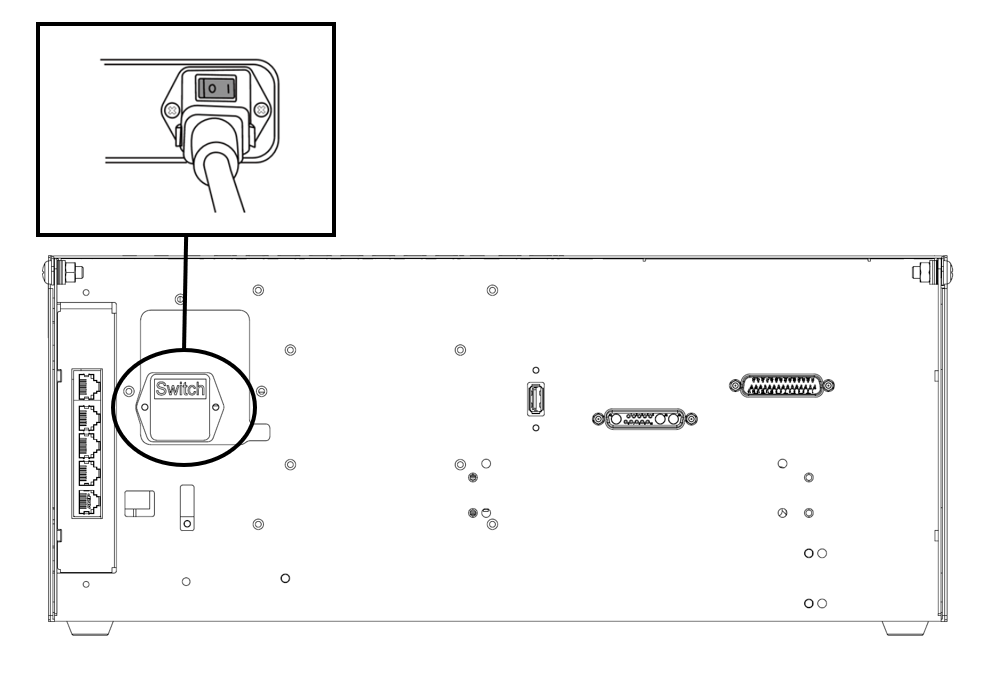
Drücken Sie den Netzschalter an der Unterseite des Controllers. Die Stromversorgung für Systeme wie Roboter, Controller und Programmierhandgerät ist eingeschaltet.
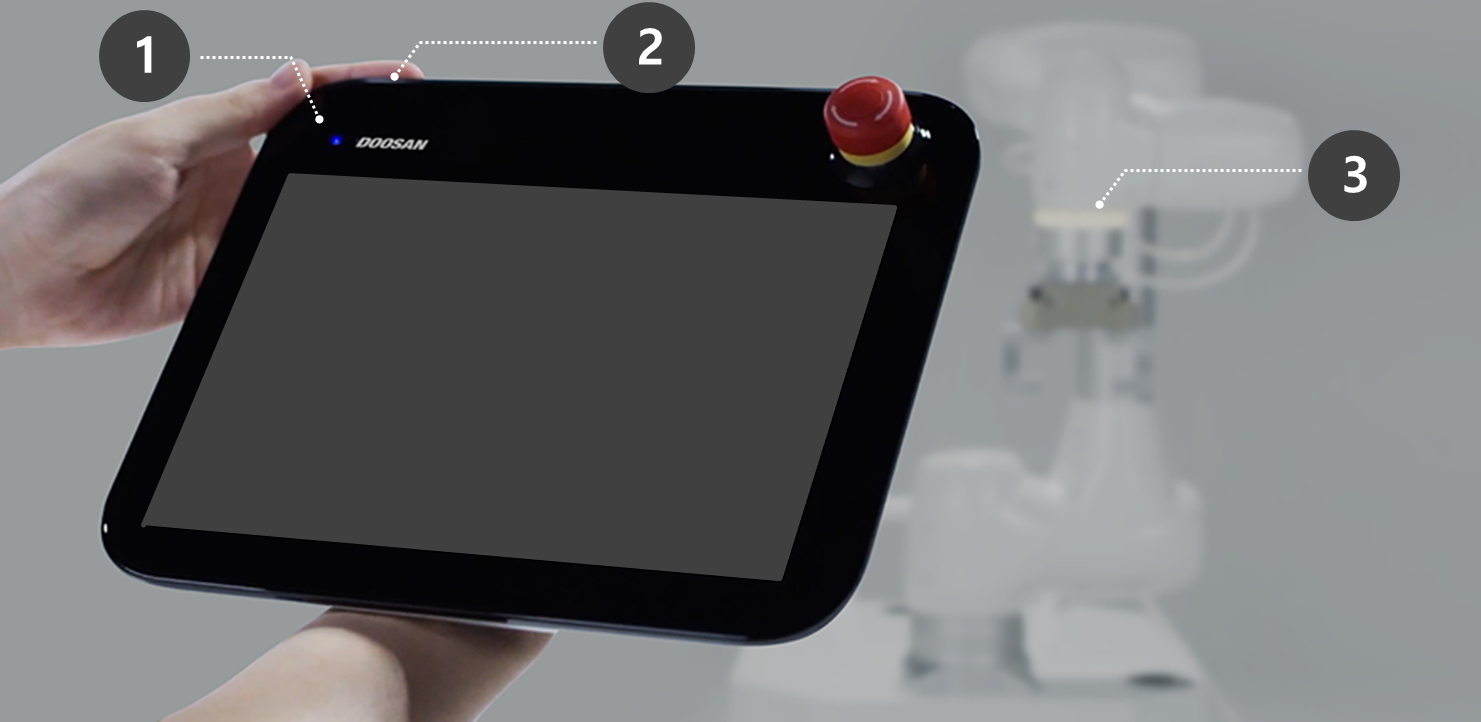
Halten Sie die ein/aus-Taste (Abb. 2) gedrückt, bis der Bildschirm des Programmierhandgeräts eingeschaltet wird. Die LED des Programmierhandgeräts (Abb. 1) und die Flansch-LED (Abb. 3) blinken rot, bis die Robotersteuerung mit dem Netzwerk verbunden ist.
ㅤ
ㅤ
Weitere Informationen zu anderen Geräten als dem Programmierhandgerät finden Sie unter Schalten Sie das System ein/aus.
Hinweis
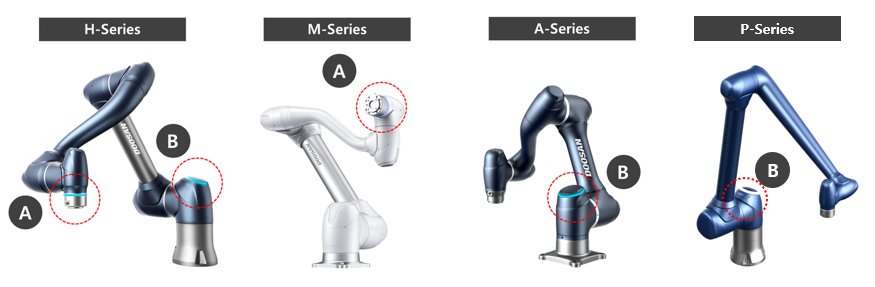
Die LED-Positionen der einzelnen Doosan Robotics Roboterserien lauten wie folgt:
A: Flansch-LED
B: LED Achse 1
Not-aus-Taster ausschalten
OBLIGATORISCH EINFACH 1 MIN
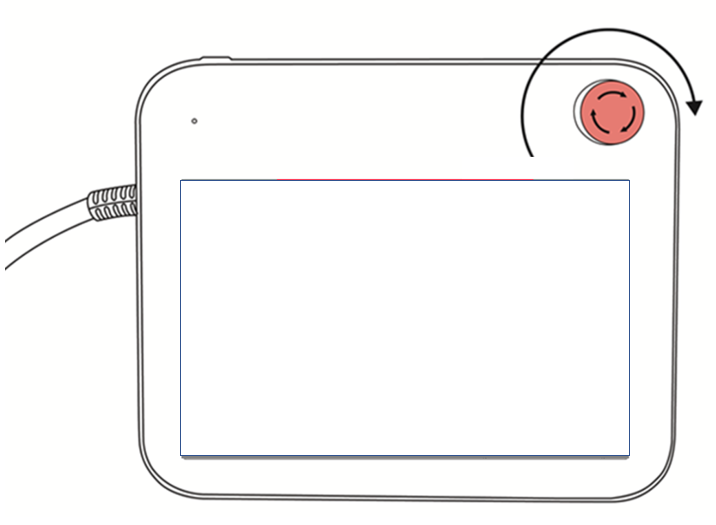
Nach der Installation des Roboters und nach dem ersten Systemstart wird beim Drücken der Not-aus-Taste des Programmierhandgeräts ein Warnungs-Popup angezeigt. Der Not-aus-Taster muss deaktiviert sein, um den Roboter zu bedienen.
Drehen Sie den Not-aus-Taster im Uhrzeigersinn, um den Not-aus-Zustand zu deaktivieren.
Verpackung lösen
OBLIGATORISCH EINFACH 3 MIN
Der Roboter befindet sich in seiner Verpackung, um einen einfachen Transport oder eine einfache Verpackung zu ermöglichen. Um den Roboter zu verwenden, muss die Verpackungsstellung deaktiviert werden. Da der Roboter eine Position beibehält, die den Grenzwert für den Gelenkwinkel überschreitet, während er sich in der Packstellung befindet, ist es aufgrund einer Verletzung der Sicherheitsgrenze nicht möglich, den Status Servo ein zu setzen. Die Roboter-LED leuchtet in diesem Zustand rot.
Hinweis
Wenn Sie den Roboter aufgrund einer Verlagerung verpacken müssen, stellen Sie die Paketposition ein, indem Sie im Verpackungsmodus mit Verschieben mit Paketposition wählen.
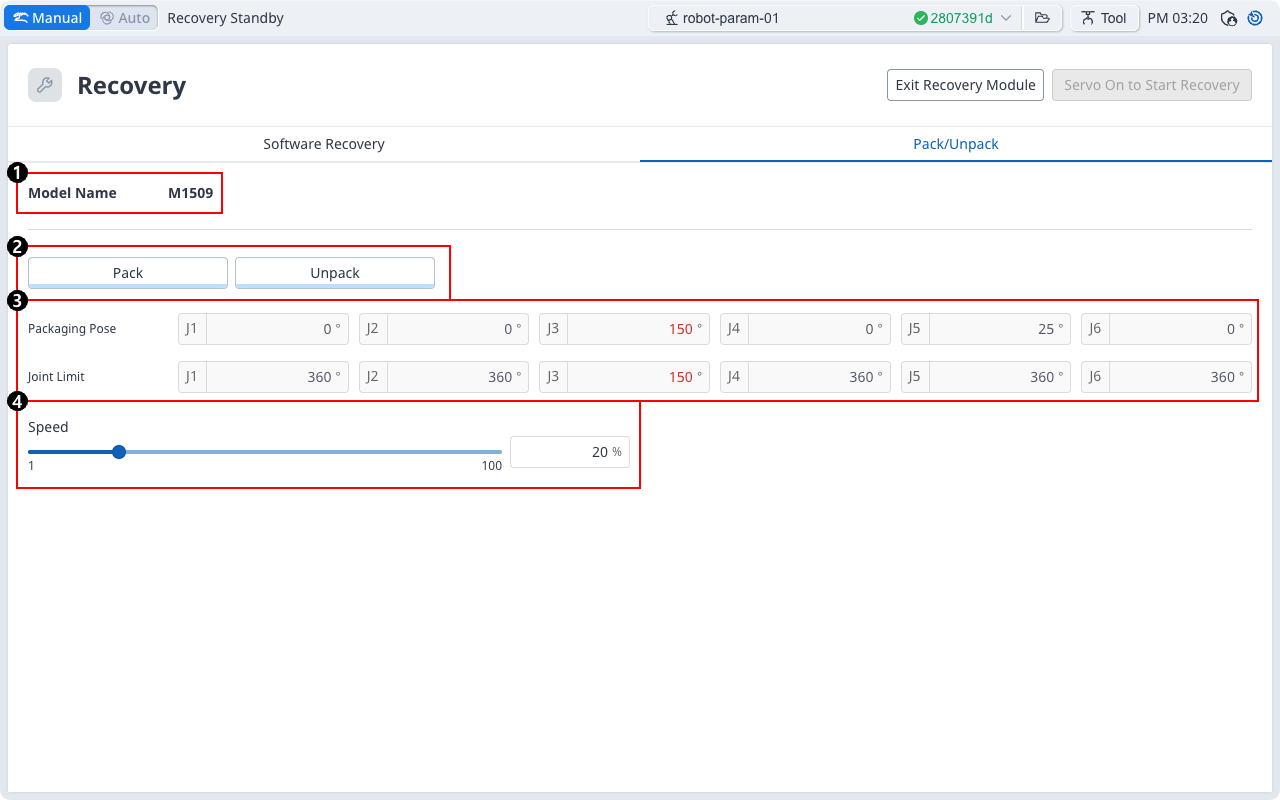
Artikel | Beschreibung | |
|---|---|---|
| 1 | Modellname | Der Name des verbundenen Robotermodells wird angezeigt. |
| 2 | Packen/Auspacken | Es kann entweder „Pack“ oder „Unpack“ (Entpacken) ausgewählt werden. |
| 3 | Begrenzung der Packstellung/Gelenke | Die Grenzwerte für die Position und die Gelenke werden angezeigt. |
| 4 | Geschwindigkeitsverhältnis | Die Geschwindigkeit des ein- oder Auspackmodus kann über einen Schieberegler oder eine Eingabe eingestellt werden. |
Der Prozess zur Konfiguration der Verpackungsstellung ist wie folgt:
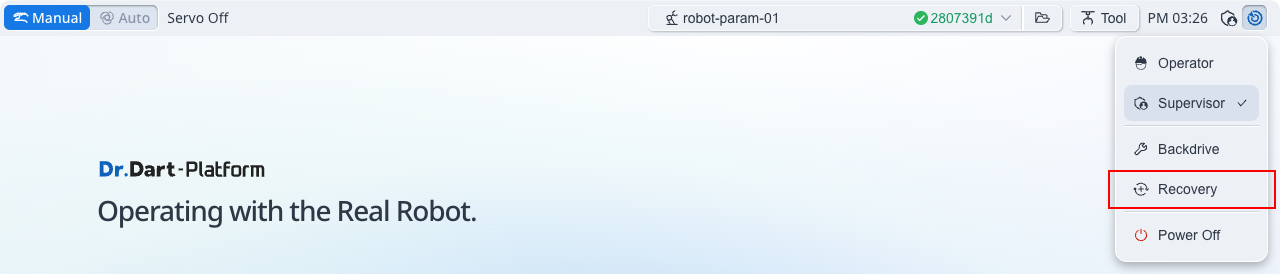
Tippen Sie im Kopfzeilenbereich auf das Menü Recovery.
Wählen Sie die Registerkarte Packaging Mode (Verpackungsmodus) aus.

Tippen Sie auf die Schaltfläche Servo ein, um die Recovery zu starten, um den Paketmodus zu aktivieren.

Der Roboter bewegt sich automatisch in die festgelegte Verpackungsposition.
Mit der Schaltfläche Pack (Verpacken) können Sie den Roboter in die Position Pack (Verpacken) bringen, und mit der Schaltfläche Unpack (Entpacken) können Sie den Roboter in die Position Default Home (Standardstartposition) bringen.
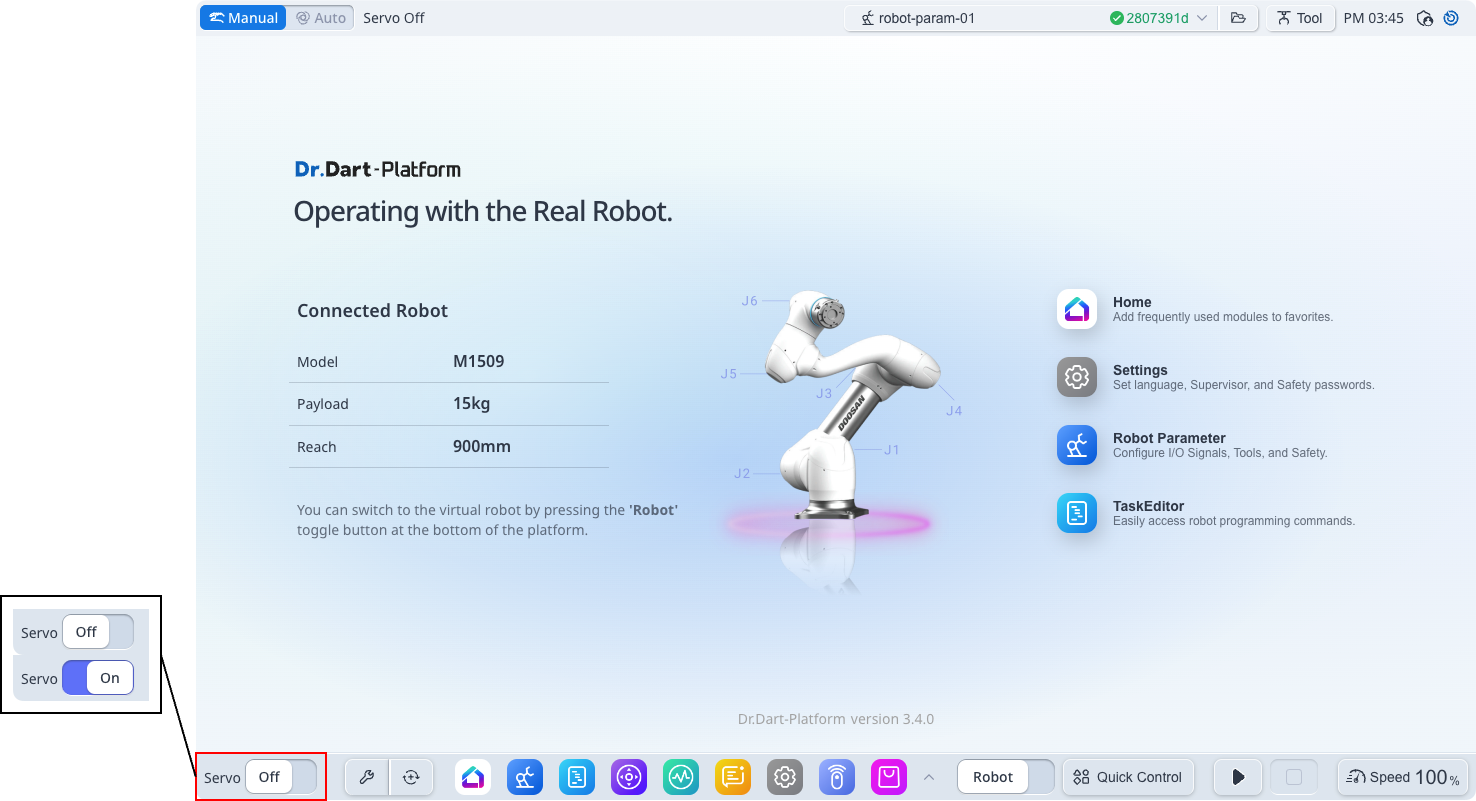
Servo Aus
OBLIGATORISCH EINFACH 1 MIN
Der Status „Servo ein“ ist der Status, in dem der Roboter bereit ist und die Robotergelenke mit Strom versorgt werden, um die Roboterposition zu ändern.
Drücken Sie die Taste Servo aus, um die Stromversorgung der Robotergelenke zu unterbrechen und den Roboter anzuhalten. Weitere Informationen finden Sie unter Übersicht über Servo ein.