
Roboterspezifikationen
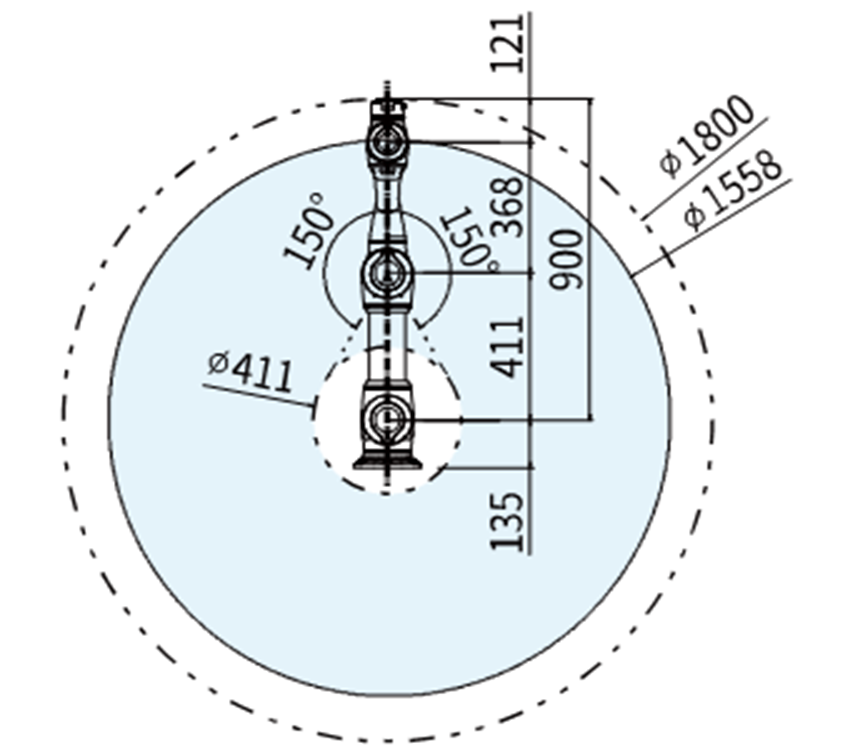
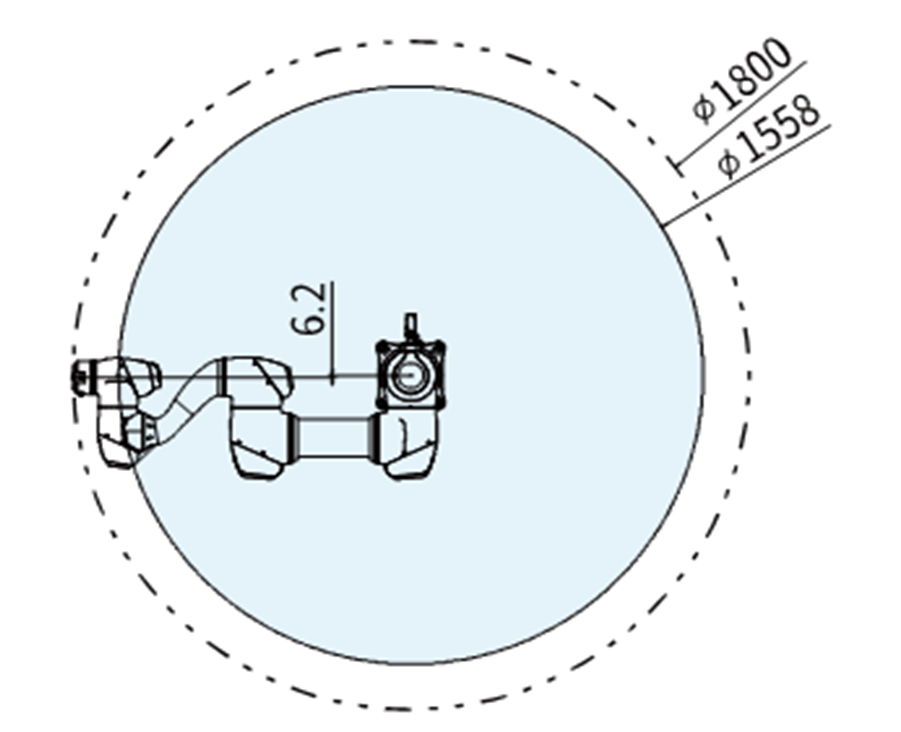
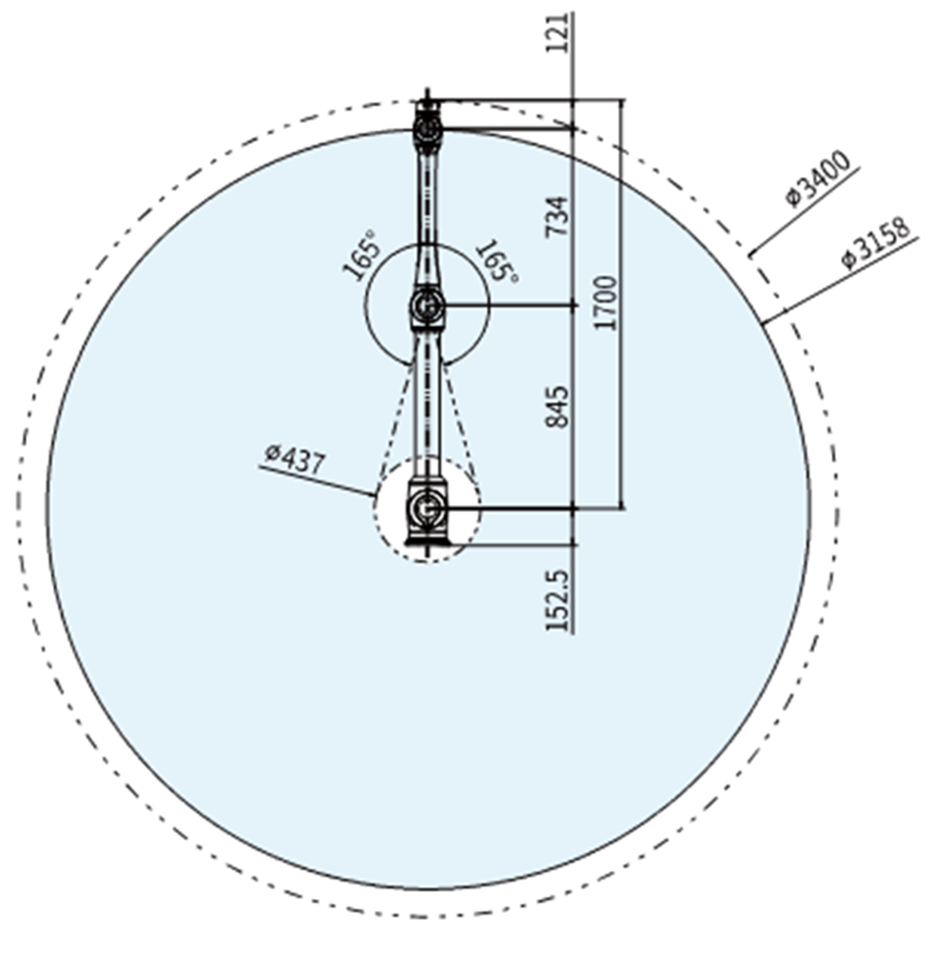
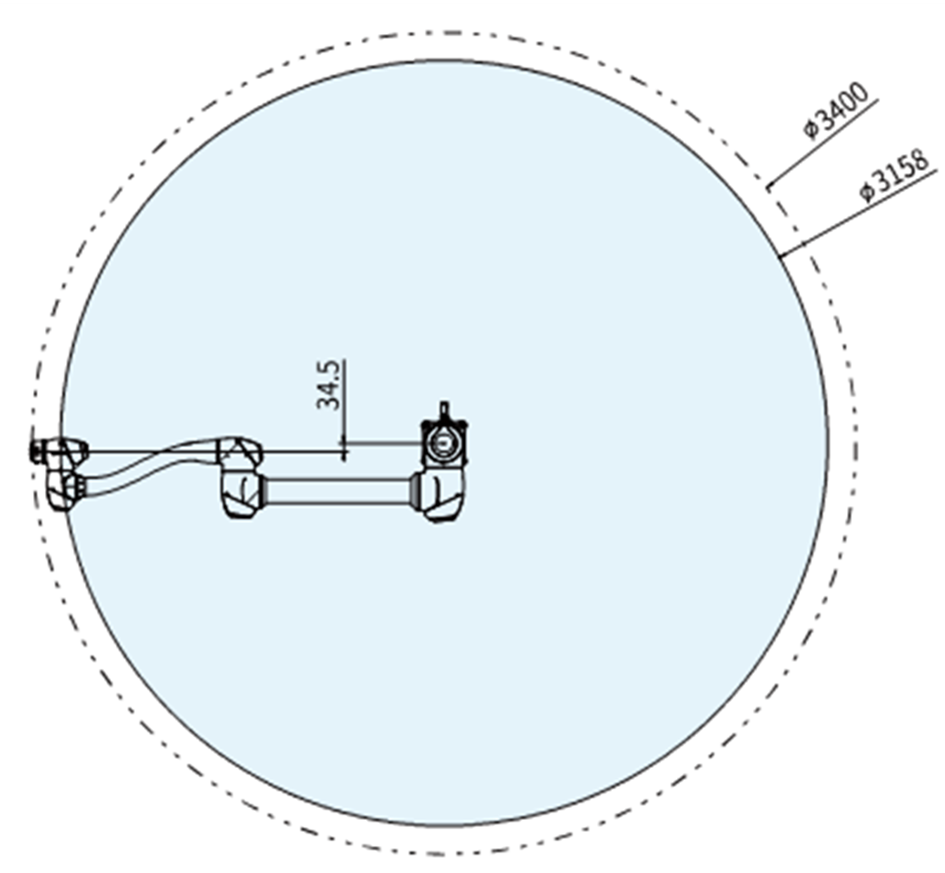
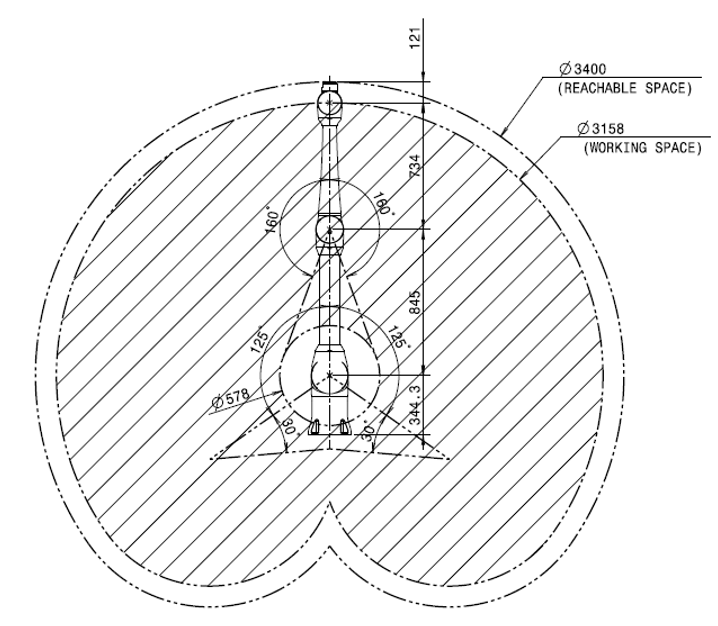
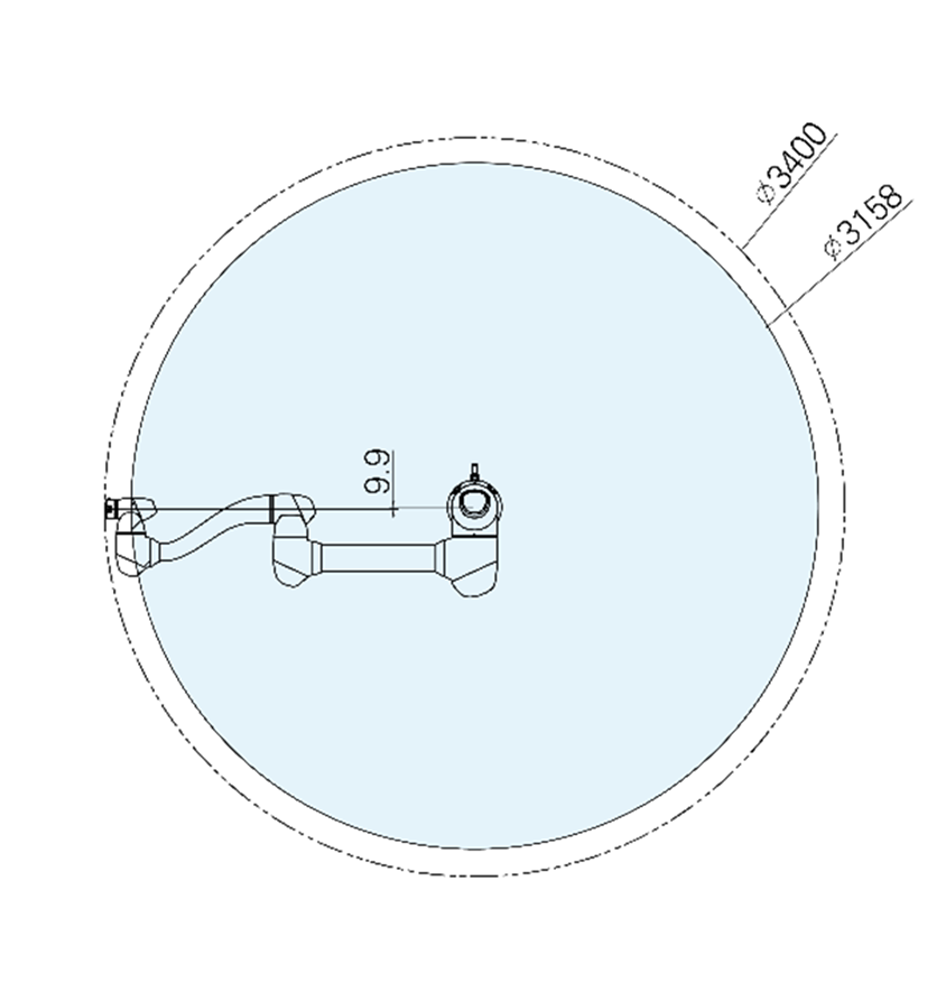
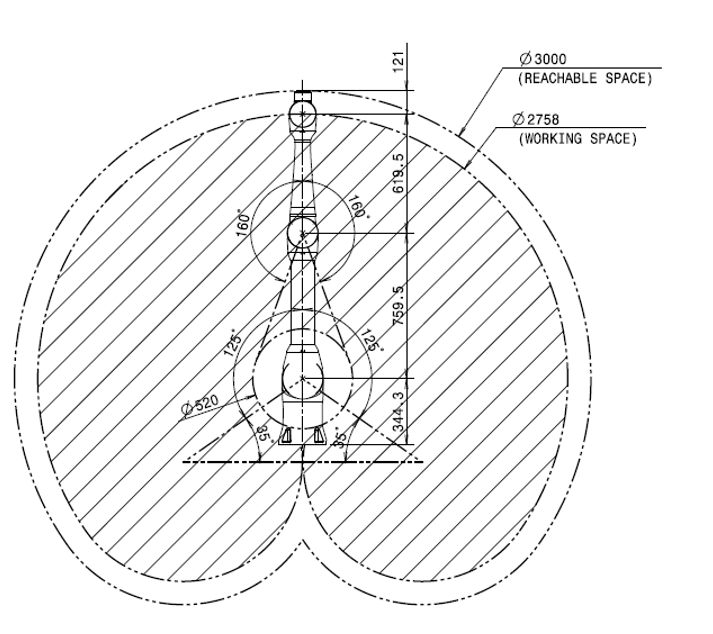
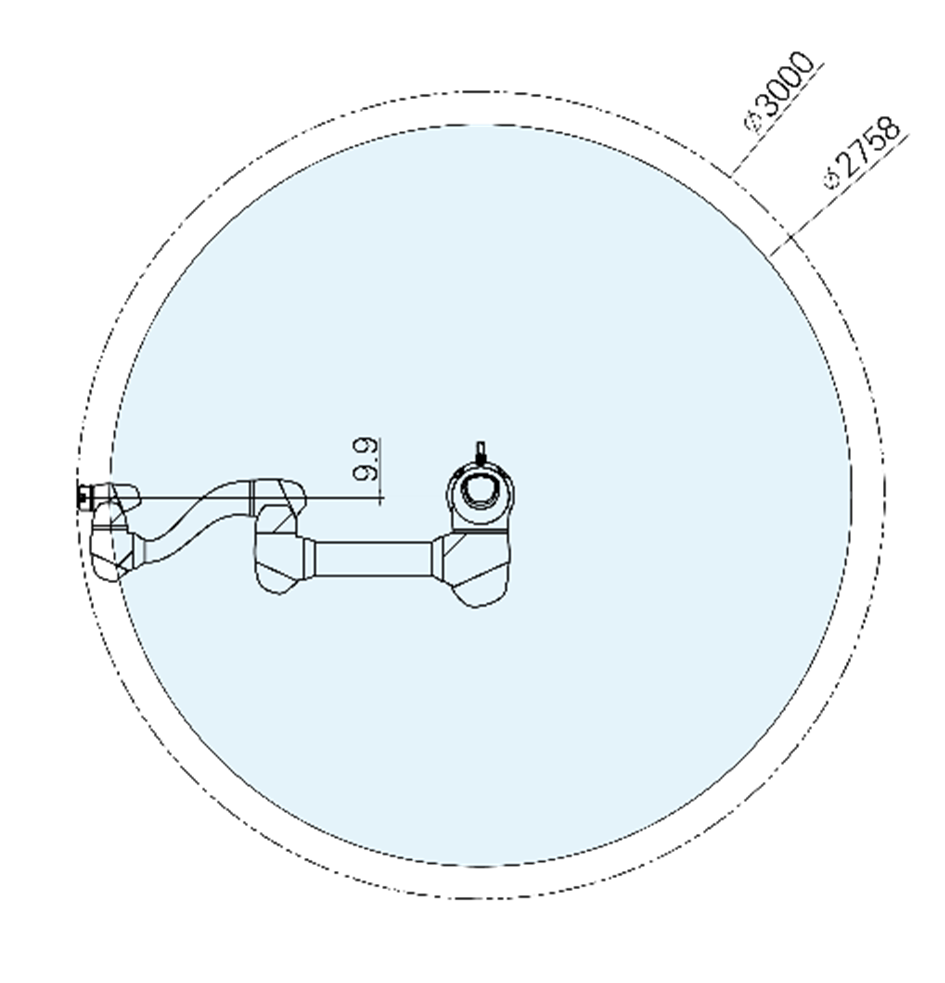
Arbeitsraum des Roboters
M0609
 |  |
M0617
 |  |
M1013
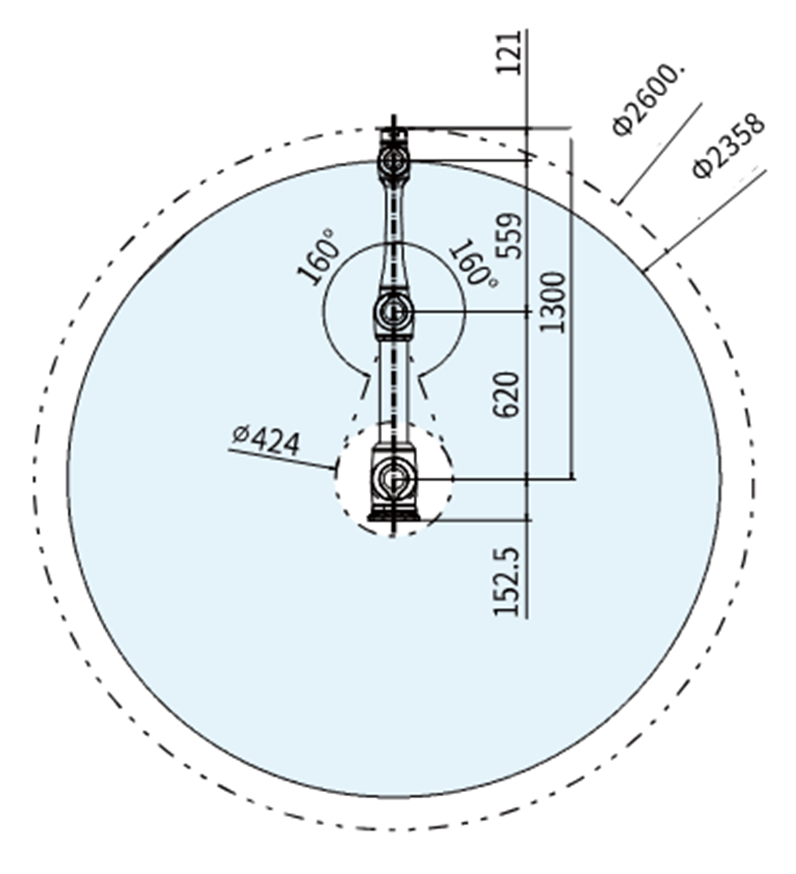 | 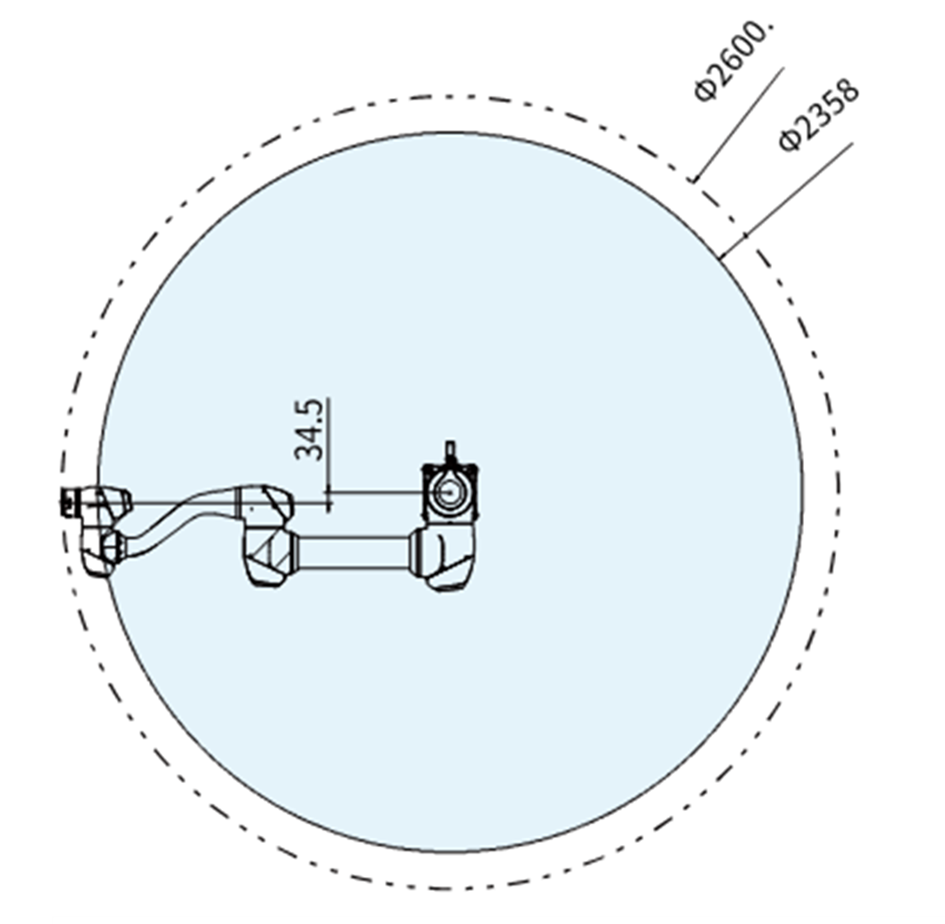 |
M1509
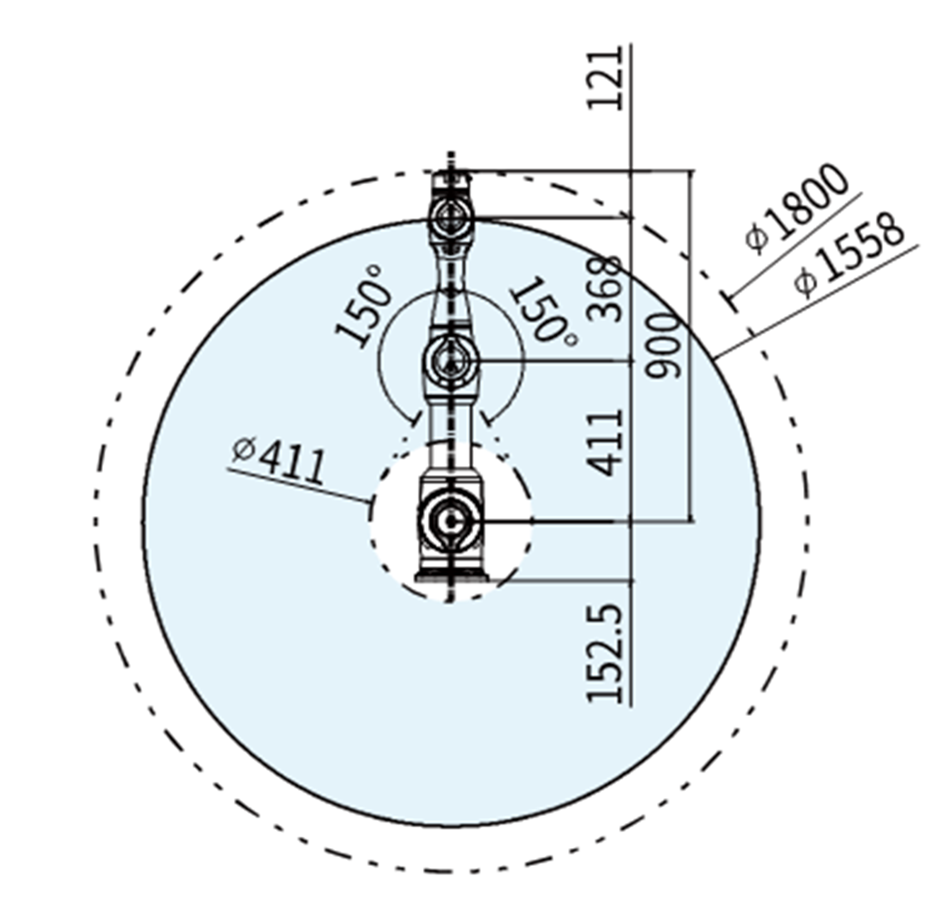 | 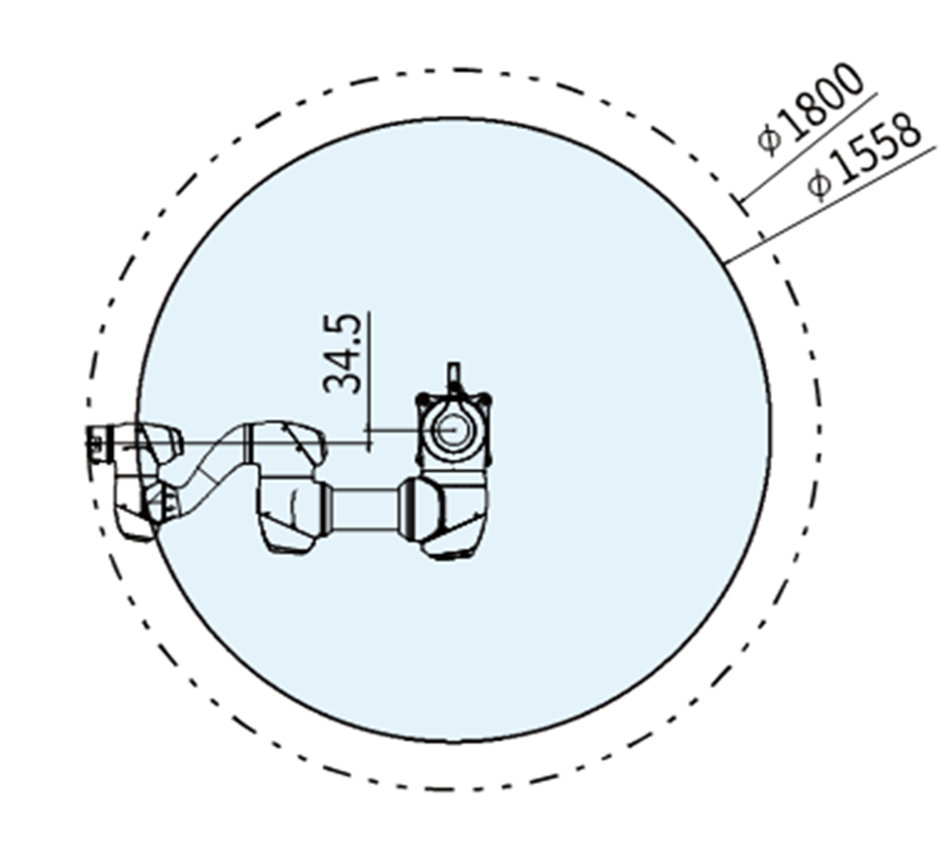 |
H2017
 |  |
H2515
 |  |
Maximale Traglast innerhalb des Aktionsraums
Die maximale Traglast des Roboters innerhalb seines Aktionsraums ändert sich entsprechend dem Abstand vom Schwerpunkt. Traglast gemäß Abstand ist wie folgt:
Hinweis
Dieses Lastdiagramm setzt ein geringes Ladevolumen des Werkzeugs voraus. Werkzeuge mit einem größeren Volumen werden im Vergleich zu einem Werkzeug gleichen Gewichts, aber geringeren Volumens größere Einschränkungen in Bezug auf Traglast oberhalb des Werkzeugschwerpunkts aufweisen, und in solchen Fällen kann es zu Vibrationen kommen.
M0609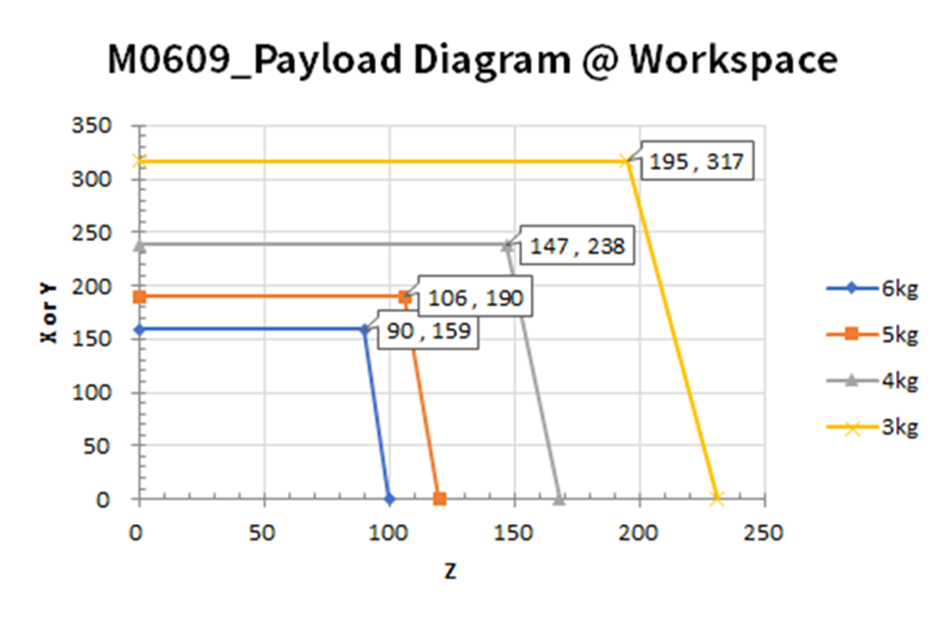 | M0609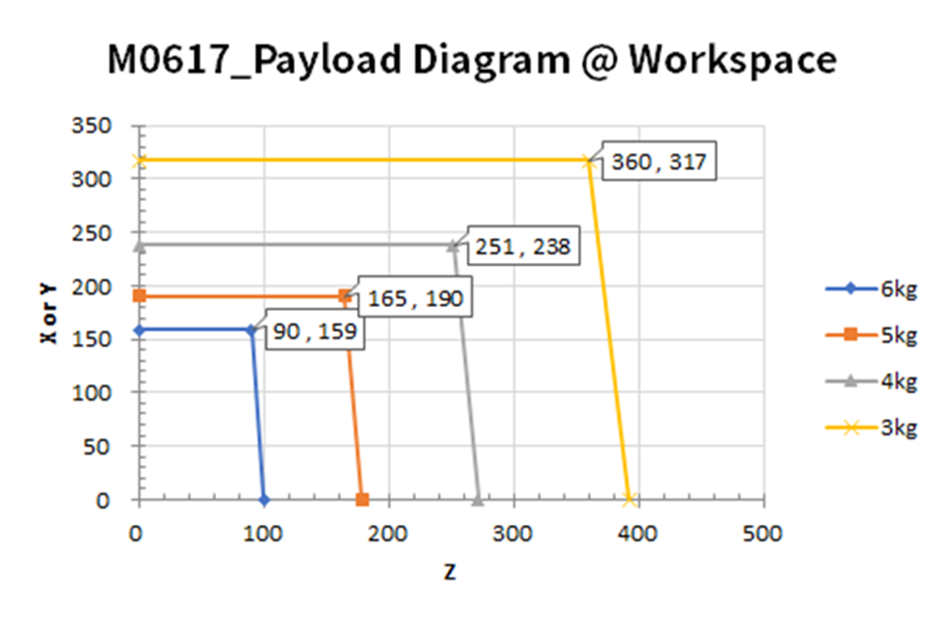 |
M1013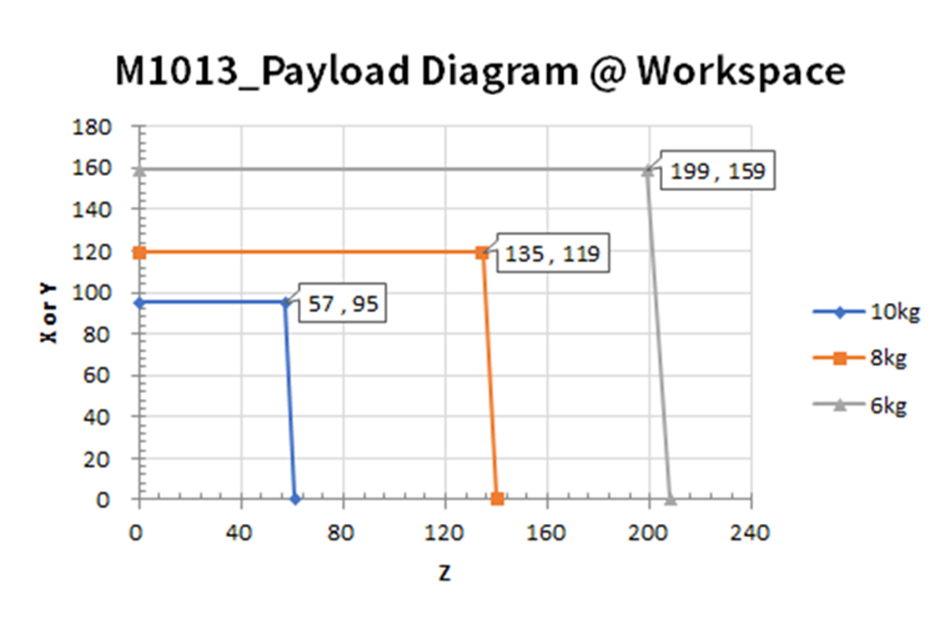 | M1509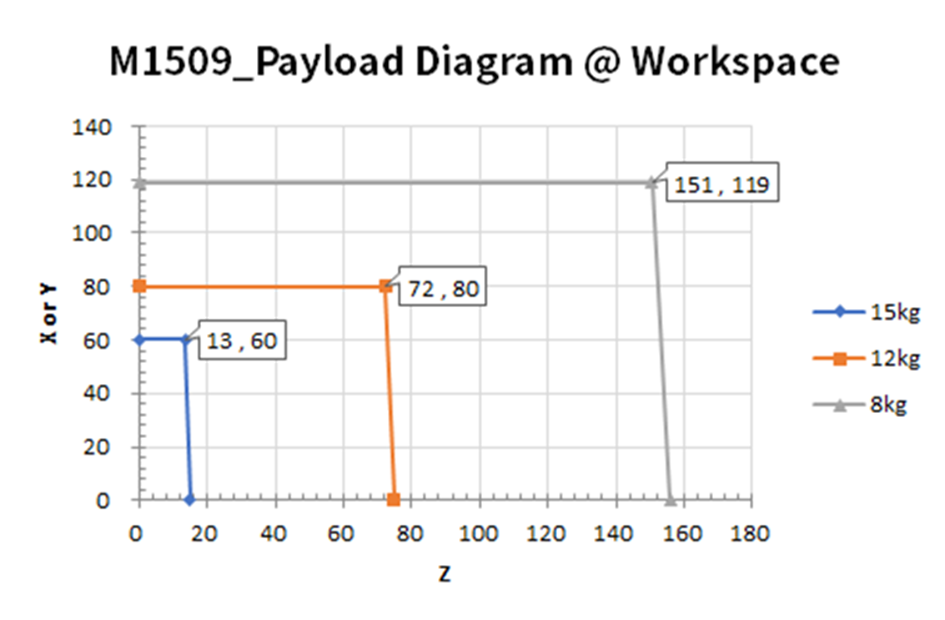 |
H2017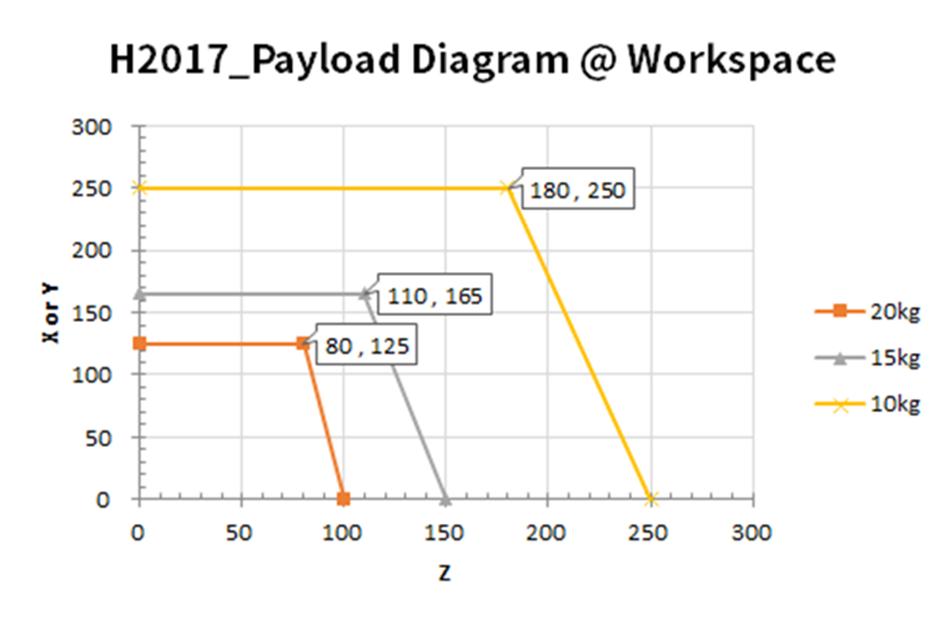 | H2515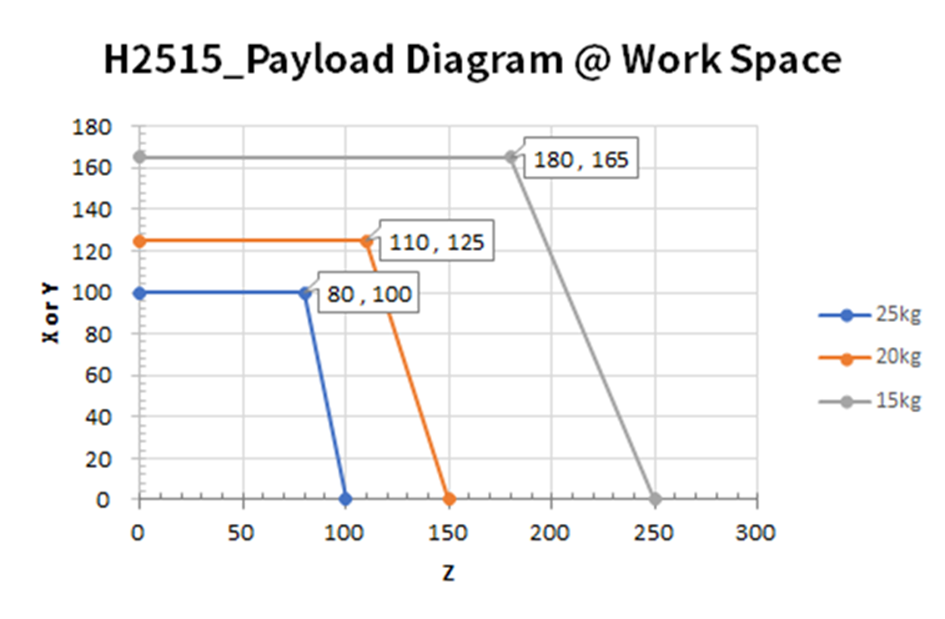 |
Zulässiges Moment und Trägheit
Das zulässige Moment und die Trägheit des Roboters J4-J6 sind wie folgt:
Modellname | J4 | J5 | J6 | |||
|---|---|---|---|---|---|---|
Zulässiger Moment | Trägheit | Zulässiger Moment | Trägheit | Zulässiger Moment | Trägheit | |
M0609 | 36 Nm | 1.6 kg㎡ | 36 Nm | 1.6 kg㎡ | 36 Nm | 1.6 kg㎡ |
M0617 | ||||||
M1013 | ||||||
M1509 | ||||||
H2017 | 145 Nm | 8.0 kg㎡ | 81 Nm | 4.5 kg㎡ | 36 Nm | 2.0 kg㎡ |
H2515 | ||||||
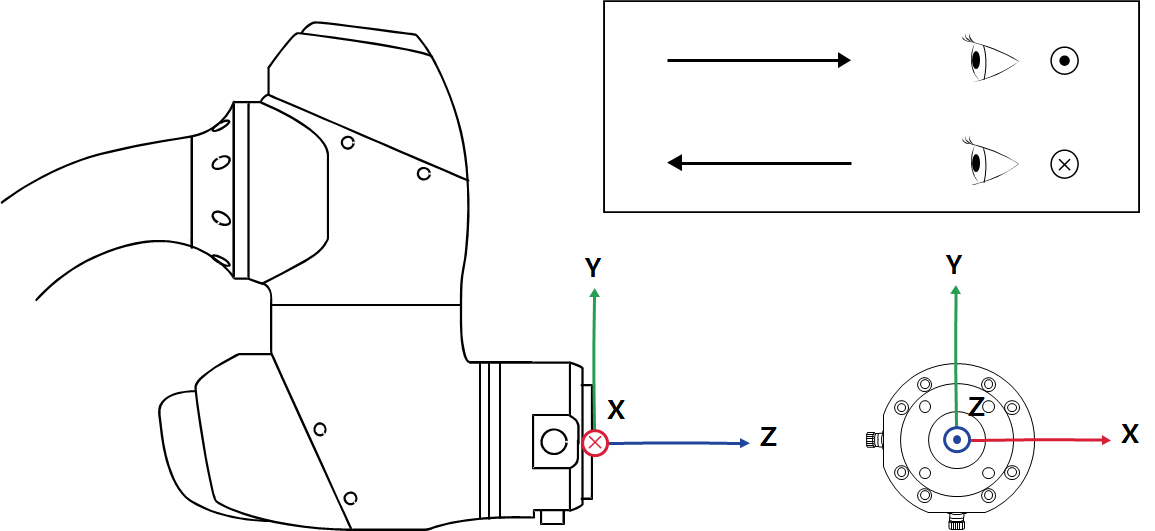
Werkzeugmittelpunkt (TCP)
Siehe Abbildung unten für TCP.
Grundlegende technische Daten
Modellname | M0609 | M0617 | M1013 | M1509 | H2017 | H2515 | |
|---|---|---|---|---|---|---|---|
Gewicht | 27 kg | 34 kg | 33 kg | 32 kg | 79 kg | 77 kg | |
Nutzlast innerhalb des Arbeitsradius | 6 kg | 6 kg | 10 kg | 15 kg | 20 kg | 25 kg | |
Max. Arbeitsradius | 900 mm | 1700 mm | 1300 mm | 900 mm | 1700 mm | 1500 mm | |
Anzahl der Achsen | 6 | ||||||
Max. TCP-Geschwindigkeit | Über 1 m/s | ||||||
Wiederholbarkeit der Position (ISO 9283) | ±0.03 mm | ±0.1 mm | ±0.05 mm | ±0.03 mm | ±0.1 mm | ||
Schutzart | IP 54 | ||||||
Lärm | < 65 dB | ||||||
Einbaurichtung | Beliebige Ausrichtung | Nur Boden | |||||
Controller und Programmierhandgerät | Doosan Controller Und Programmierhandgerät | ||||||
Vibration und Beschleunigung | 10≤f<57㎐ - 0.075 mm Amplitude 57≤f≤150㎐ – 1G | ||||||
Auswirkung | Max. Amplitude: 50㎨(5G)
| ||||||
Betriebstemperatur | 0 ℃ ~45 ℃ (273 K bis 318 K) | ||||||
Lagertemperatur | -5 ℃ ~50 ℃ (268 K bis 323 K) | ||||||
Luftfeuchtigkeit | 20 % ~ 80 % | ||||||
Achsenspezifikationen
Modellname | M0609 | M0617 | M1013 | M1509 | H2017 | H2515 |
|---|---|---|---|---|---|---|
Betriebswinkel | ||||||
J1 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
J2 | ±360° (TP:±95°) | ±360° (TP:±95°) | ±360° (TP:±95°) | ±360° (TP:±95°) | ±125° (TP:±95°) | ±125° (TP:±95°) |
J3 | ±150° (TP:±125°) | ±165° (TP:±145°) | ±160° (TP:±135°) | ±150° (TP:±125°) | ±160° (TP:±135°) | ±160° (TP:±135°) |
J4 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
J5 | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) |
J6 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
Max. Drehzahl pro Achse (Nutzlastbetrieb) | ||||||
J1 | 150 °/s | 100 °/s | 120 °/s | 150 °/s | 100 °/s | 100 °/s |
J2 | 150 °/s | 100 °/s | 120 °/s | 150 °/s | 80 °/s | 80 °/s |
J3 | 180 °/s | 150 °/s | 180 °/s | 180 °/s | 100 °/s | 100 °/s |
J4 | 225 °/s | 225 °/s | 225 °/s | 225 °/s | 180 °/s | 180 °/s |
J5 | 225 °/s | 225 °/s | 225 °/s | 225 °/s | 180 °/s | 180 °/s |
J6 | 225 °/s | 225 °/s | 225 °/s | 225 °/s | 180 °/s | 180 °/s |