
Nastavení referenčních souřadnic pro pohyb
Chcete-li přesunout robota na základě světových souřadnic, postupujte takto:
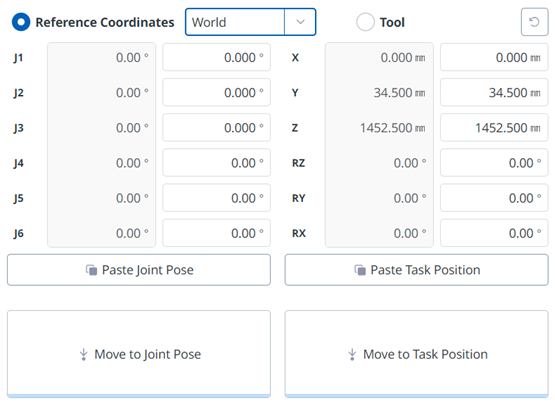
- Vyberte kartu Přesunout a Referenční souřadnice.
- Vyberte možnost Svět jako souřadnice zobrazení a vyberte kartu Svět.
- Nakonfigurujte pózu pro pohyb s odkazem na souřadnice světa.
- Klepnutím a přidržením tlačítka přesunout na odpovídající pozici přejdete na nastavené souřadnice.