
Konfigurace systému
| Ne | Jméno | Popis |
|---|---|---|
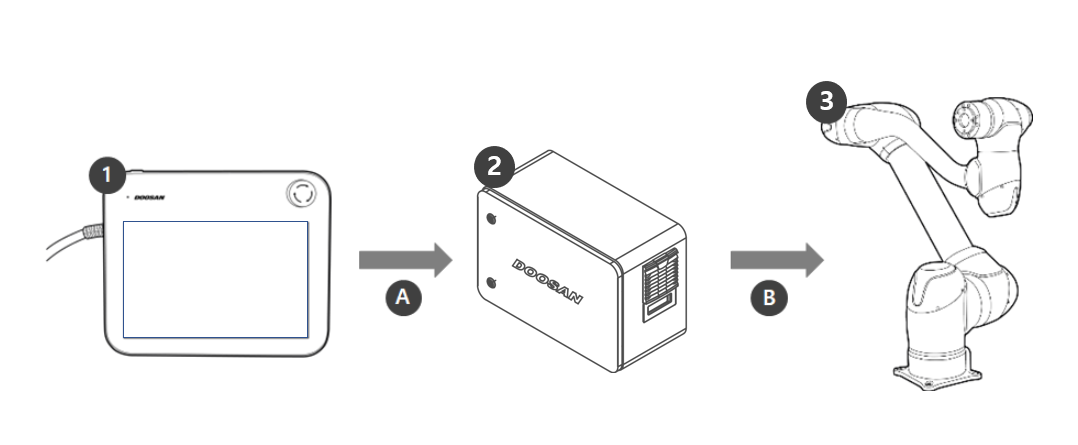
| 1 | Vyučovat přívěsek | Toto zařízení řídí celý systém a je schopno naučit robot specifické pozice nebo nastavení související s manipulátory a regulátory. |
| 2 | Řídicí jednotka | Slouží k nastavení pohybu robota podle polohy nebo pohybu nastaveného závěsem učení. Obsahuje různé i /o porty, které umožňují připojení a použití různých typů zařízení a zařízení. |
| 3 | Manipulátor | Jedná se o průmyslový kolaborativní robot, který může být použit s různými nástavci nástrojů pro přepravu předmětů nebo sestavení dílů. |
| A | Příkaz/monitorování | |
| B | Napájení/síť |