Přehled Eulerova úhlu
Eulerův úhel je způsob, jak vyjádřit úhly os X, Y a z , které jsou mezi sebou kolmé ve směru objektu. A, B a C odkazují na úhly sekvenčního otáčení. Každý výrobce robotů definuje toto pořadí rotace A, B a C jinak, například Rz-Ry-Rz, Rz-Ry-Rx nebo Rx-Ry-Rz.
Například Rz-Ry-Rx. Zde Rz znamená rotaci v ose Z, Ry znamená rotaci v ose Y a Rx znamená rotaci v ose X. Rz lze vyjádřit jako úhel A, Ry jako úhel B a Rx jako úhel C k označení aktuálního směru otáčení objektu. Všimněte si, že jakmile je rotace provedena ve směru osy Z ze souřadnic, rotace budou provedeny na základě nových souřadnic.
To lze vizualizovat kroky 1 až 4.
Předpokládejme, že existují souřadnice (X, Y, z ).
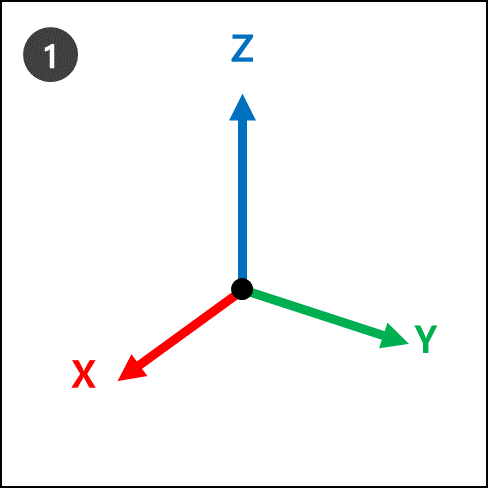
RZ: Otočte o stupně od osy z .
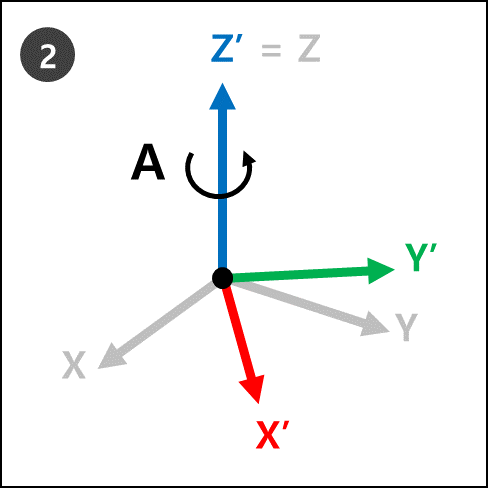
RY : Otočte o stupně B od nové osy Y (Y’) nových souřadnic (X’, Y’, z ’) v kroku 2.
RZ : Otočte o stupně B od nové osy z (z ’’) nových souřadnic (X’’, Y’, z ’’) v kroku 3.
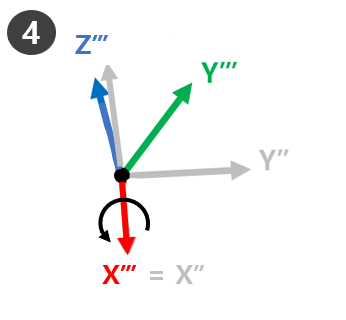
Nové souřadnice (z ’’’’’’’, Y’’’’’’, X’’’’’, krok 4, se vztahují k aktuální rotaci robota, když jsou použity Euler úhly A, B a C.
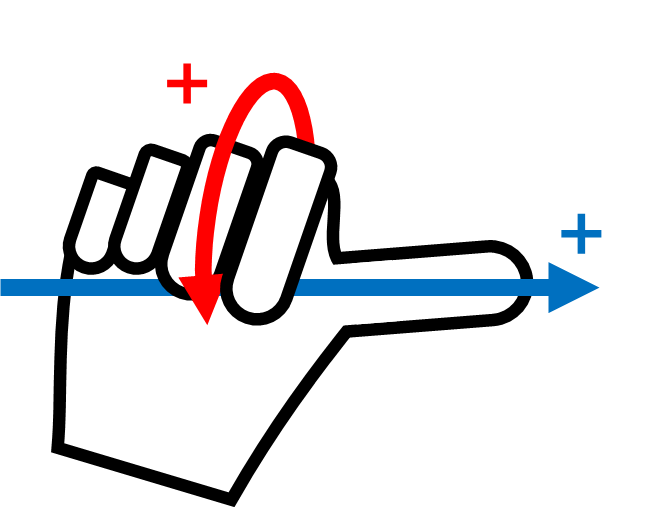
To lze snadno vizualizovat pravou rukou. Udělejte následující pózu pravou rukou. Toto se nazývá pravidlo pravé ruky a tím, že palec (osa X), ukazováček (osa Y) a prostřední prst (osa z ) budou kolmé k sobě, vytvoří souřadnice skládající se z os X, Y a Z.
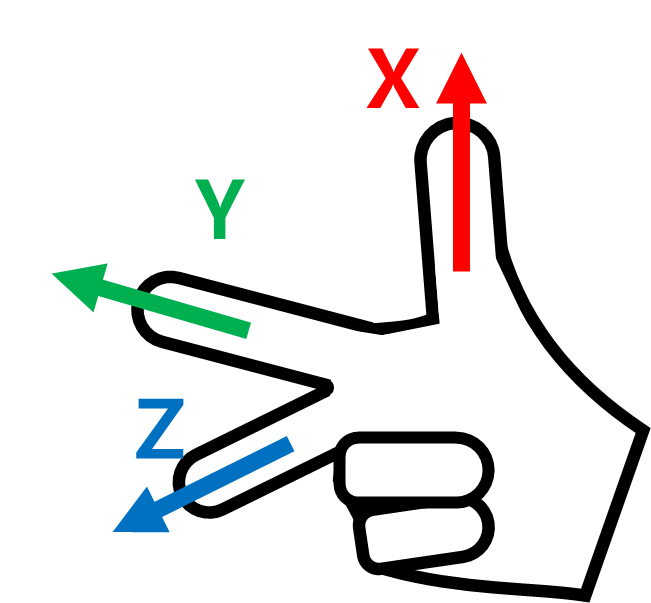
Pak udělejte pravou kartézskou pozici Rule a proveďte rotaci Rz, Ry a Rx v sekvenčním pořadí.
Rz: Otočte prostředním prstem (osa z ) o stupně A.
RY: Otočte ukazováčkem (osa Y) o stupně B.
Rx: Otočte prostředním prstem (osa x ) o stupně C.
Poznámka
Směr + otáčení A, B a C je směr čtyř prstů kromě palce, když palec ukazuje na směr + a čtyři prsty jsou sevřené. Tomu se říká zákon o pravotočivé šroubové svorce.