
Nastavení základních referenčních souřadnic pro pohyb
Pohyb robota na základě jeho základních souřadnic:
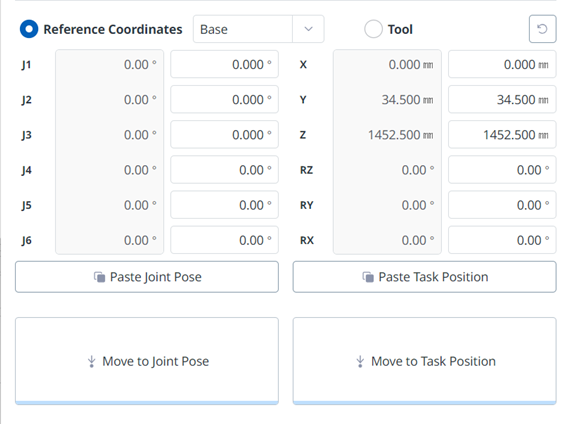
- Vyberte kartu Přesunout a poté vyberte položku Referenční souřadnice.
- Vyberte souřadnici zobrazení jako základ.
- Klepnutím a podržením tlačítka se přesunete na odpovídající pozici úkolu a přesunete se na nastavené souřadnice.