
Přesunout obrazovku
Přesunout rozvržení nabídky
| Item | Description | |
|---|---|---|
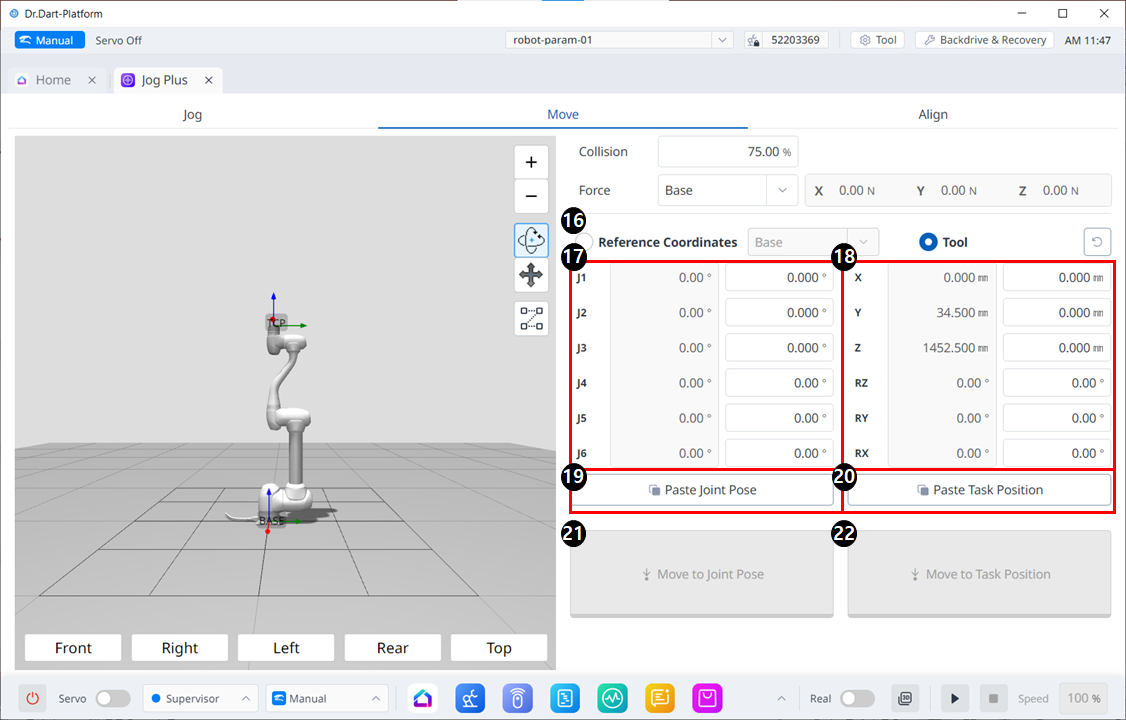
| 16 | Reference Coordinates | Vyberte referenční souřadnicový systém, který se má použít pro souřadnice úlohy na obrázku 18. Můžete si vybrat základní, světové nebo uživatelské souřadnice. |
| 17 | Joint Posture | Zobrazuje aktuální polohu robota a cílovou polohu kloubu. |
| 18 | Task Posture | Zobrazuje aktuální polohu robota a polohu cílového úkolu, které odpovídají vybranému referenčnímu souřadnicovému systému. |
| 19 | Paste Joint Posture | Vložte hodnotu držení těla zkopírovanou do schránky do panelu držení kloubu. |
| 20 | Paste Task Posture | Vložte hodnotu pozice zkopírovanou do schránky do panelu pozice úlohy. |
| 21 | Joint Move button | Toto tlačítko způsobí, že se robot přesune do cílové pozice kloubu. |
| 22 | Task Move button | Toto tlačítko způsobí, že se robot přesune do cílové pozice úkolu. |