Přehled konceptu compliance/Force Control příkazu Editor úloh
VOLITELNÉ TĚŽKÉ 20 MIN
Řízení síly a kontrola dodržování předpisů jsou funkce, které řídí sílu robota. Také s přidáním pohybových příkazů může být síla řízena současně s pohybem. Kontrola souladu a kontrola síly mají následující rozdíly.
- Kontrola dodržování předpisů
- V případě Compliance Control robot splňuje vnější sílu na konci TCP robota a při odstranění vnější síly se vytvoří síla, která přesune robota zpět tam, kde by měl být.
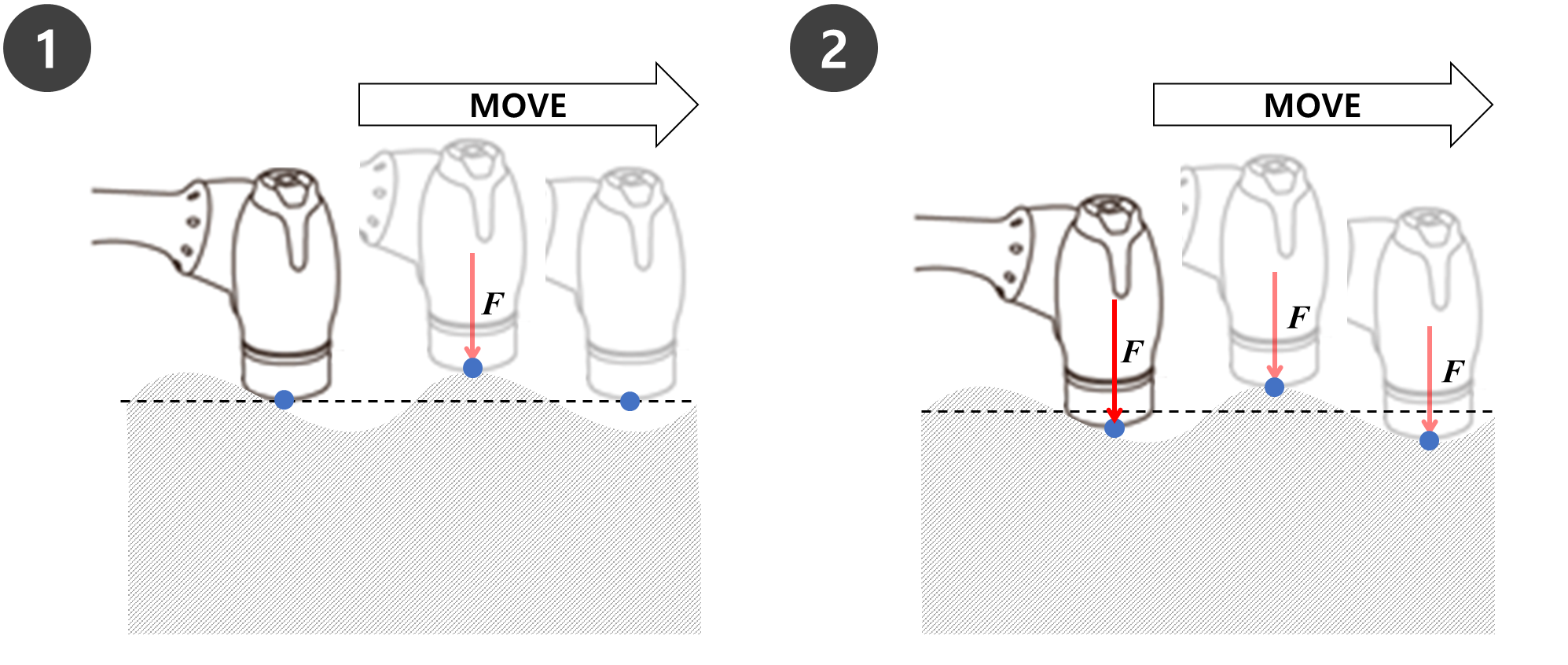
- Tento přístup lze použít, když se robot pohybuje v přímé linii na nerovném povrchu a chcete zajistit, aby se robot pohyboval, aniž by způsobil poškození sebe nebo povrchu. To lze také použít k zabránění neočekávaným kolizím v blízkosti obrobků.
- Ovládání síly
- V případě Force Control je síla aplikována na TCP na konci robota. Zrychlení je generováno ve směru, ve kterém je generována síla, což způsobuje, že robot se současně pohybuje ve směru síly kromě směru pohybu.
- Když robot přijde do kontaktu s objektem, síla se aplikuje na objekt, dokud není nastavená síla a odpudivá síla objektu v rovnováze.
- Tento přístup lze použít, když se robot pohybuje v přímé linii na nerovném povrchu a chcete zajistit, aby byla na povrch aplikována konstantní síla. To lze také použít pro úkoly, které vyžadují, aby robot tlačil konstantní silou, tj. leštění práce.
Poznámka
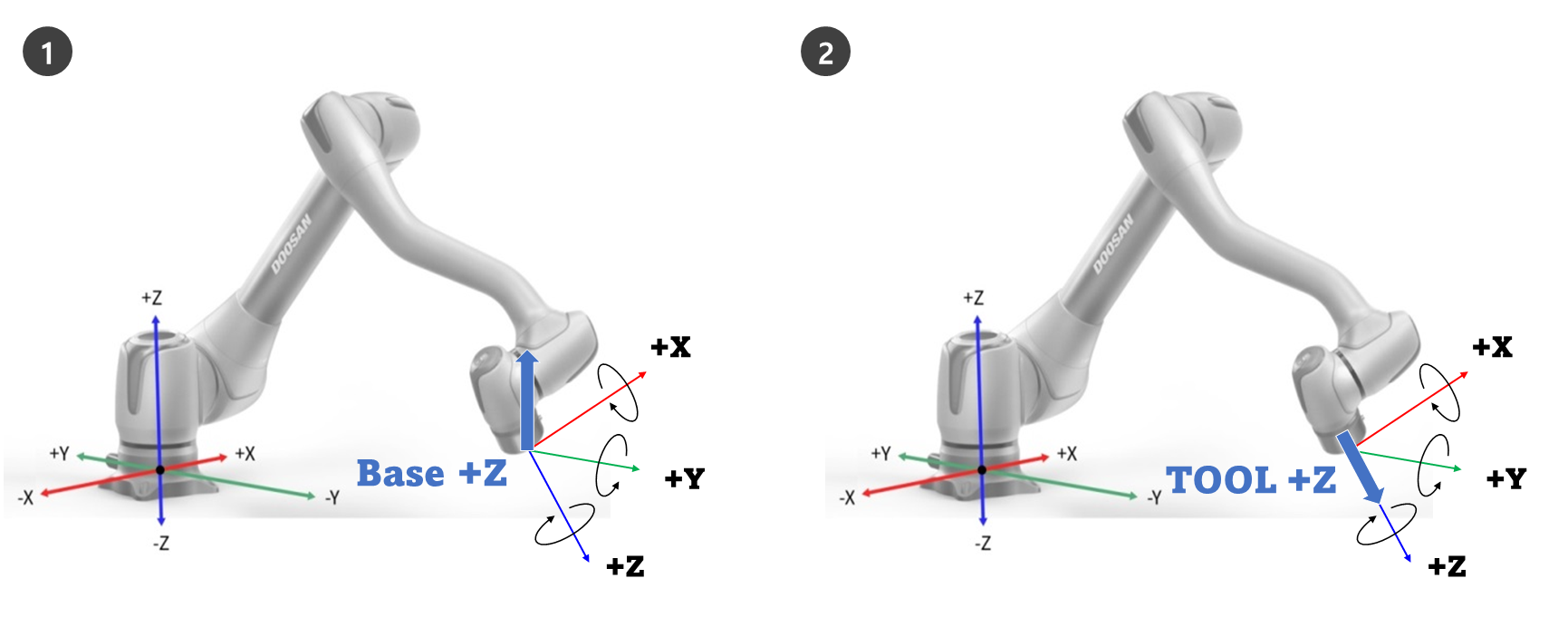
Příkazy Compliance a Force se provádějí na základě aktuálních souřadnic. Výchozí souřadnicí úkolu jsou souřadnice základny a souřadnice lze změnit příkazem set.
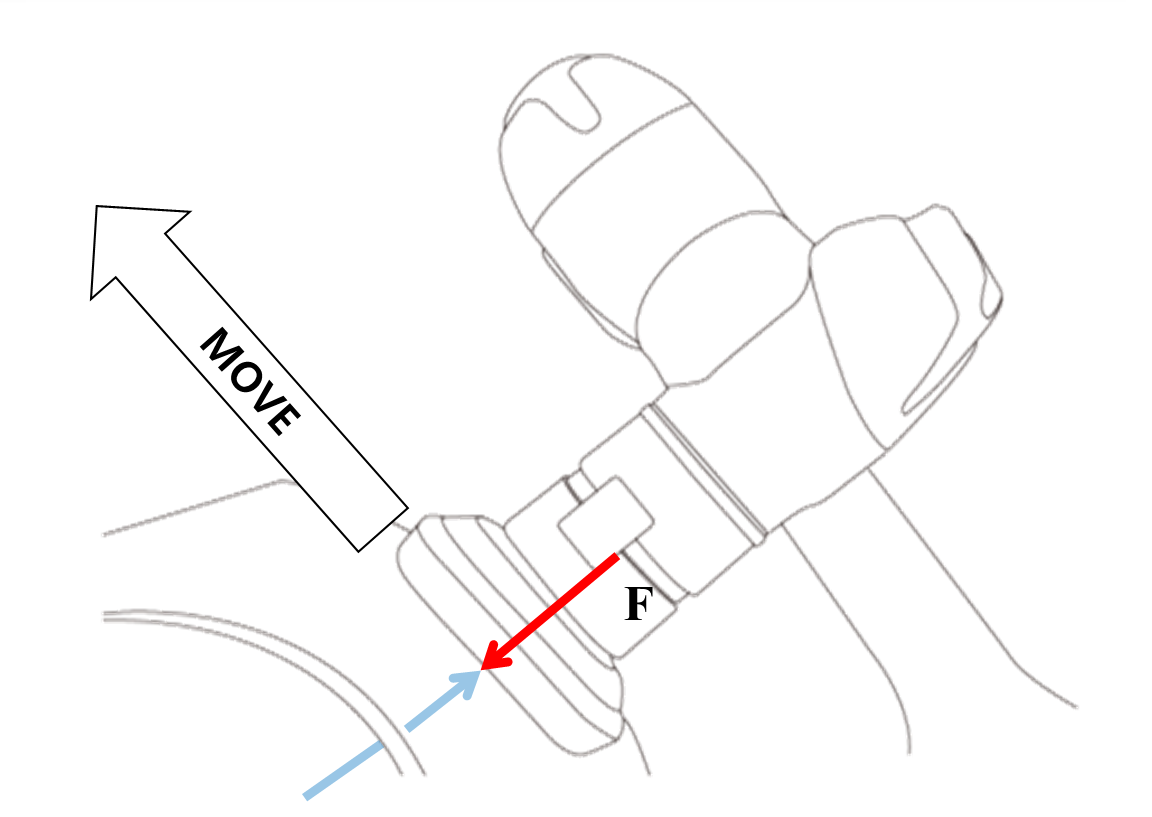
- Obr. 1 je provozní směr, když je na základní souřadnice aplikována kontrola síly/shody ve směru +Z.
- Obr. 2 je provozní směr, když je na souřadnicích nástroje aplikována kontrola síly/shody ve směru +Z.
Kontrola dodržování předpisů
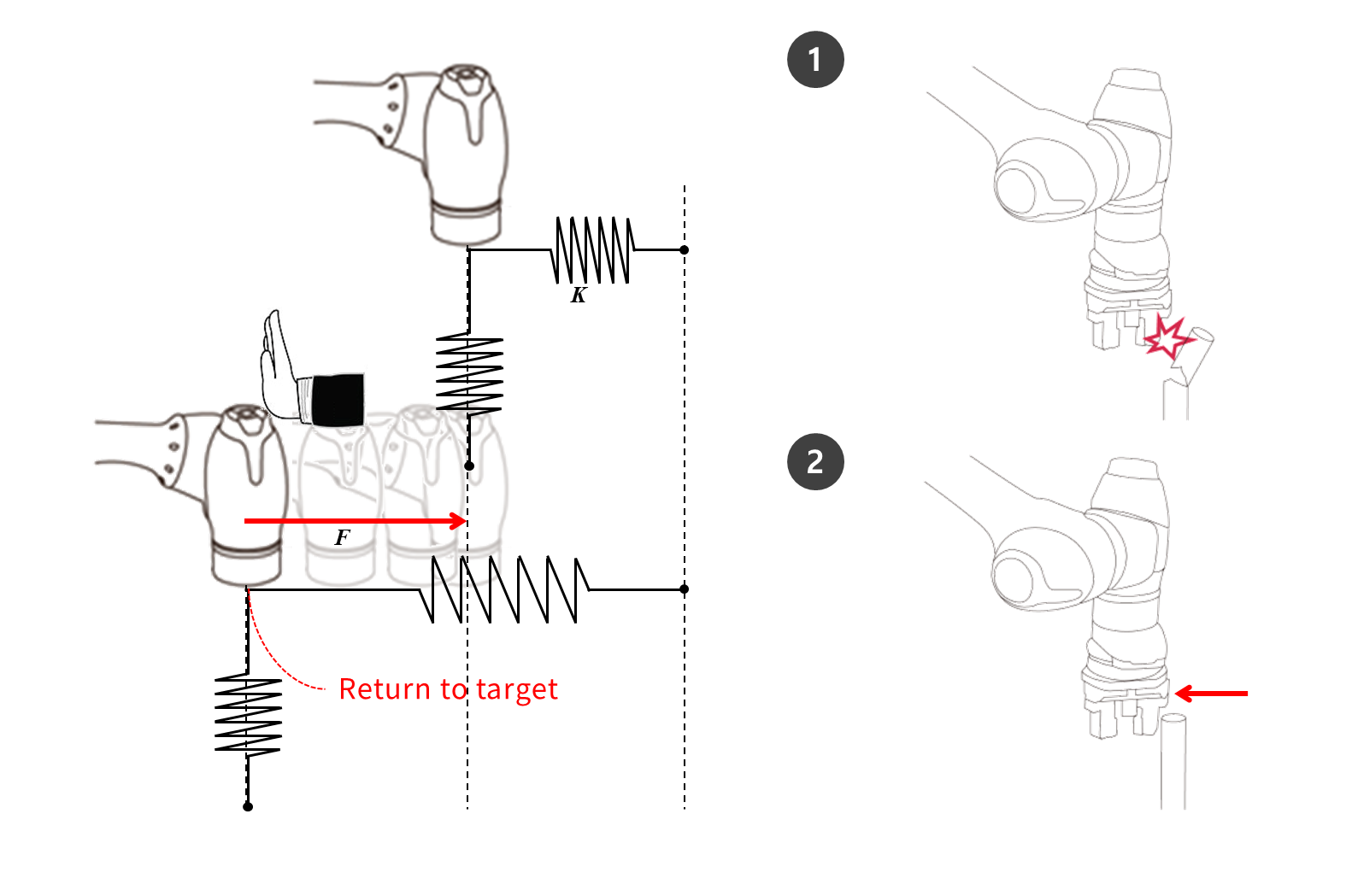
Kontrola souladu je funkce, která splňuje vnější sílu podle nastavené tuhosti, když je síla aplikována na TCOP na konci robota. Vyvažuje síly v cílovém bodě a je to kontrolní metoda, která generuje odpuzující sílu, pokud dojde k posunutí od vyvažovacího bodu. Během kontroly dodržování předpisů se konec robota odráží jako pružina.
- Pokud dojde ke kolizi při použití samotného řízení pohybu, je možné, že se kolizní objekt může poškodit.
- Roboty Doosan Robotics se při kolizi bezpečně zastaví, ale v závislosti na nastavení uživatele , jako jsou bezpečnostní limity > citlivost kolize, mohou nastat následující situace.
- Pokud je během řízení pohybu nastavena na hodnotu Zapnuto, robot se bude pohybovat při dodržování kolidovaného objektu.
Pokud F je vnější síla, k je tuhost a X je vzdálenost, následující vzorce jsou pravdivé.
- F = K * X.
- K = F / X
- X = F / K
Na základě výše uvedených vzorců, pokud je tuhost řízení shody nastavena na 1000N/m a pokud se robot pohybuje 1 mm, je generovaná vnější síla 1N.
- F=1000 N/m *0,001 m =1 N (0,001 m =1 mm)
Poznámka
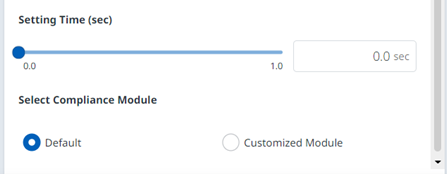
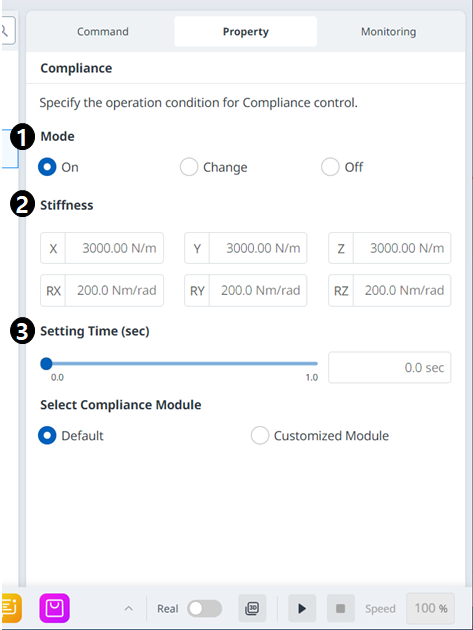
V příkazu vlastnost compliance lze nastavit následující hodnoty:
- Režim
- Zapnuto: Umožňuje kontrolu dodržování předpisů
- Změna: Pokud je režim dodržování nastaven na Zapnuto, změní se na tuhost
- Vypnuto: Zakáže kontrolu dodržování předpisů
- Rozsah tuhosti
- Řada M/H: Překlad (0 ~ 20000N/m ), rotace (0 ~ 1000Nm/rad)
- Řada a : Překlad (0 ~ 10000N/m ), rotace (0 ~ 300Nm/rad)
- Nižší hodnoty tuhosti budou reagovat na vnější sílu šetrněji a budou vyžadovat více času pro návrat do cílového bodu
- Nastavení času
- Je to čas potřebný pro dosažení nastavené hodnoty tuhosti (0-1s) aktuální hodnoty tuhosti
Upozornění
- Je třeba přesně nastavit hmotnost nástroje a TCP (Tool Center Point). Nepřesná hmotnost nástroje může způsobit, že robot zjistí hmotnost nástroje jako vnější sílu, a nastavení příkazu compliance na způsobí chybu polohy.
- Napětí sady šatů může na robotu vytvářet vnější točivý moment. Proto buďte opatrní při instalaci sady šatů.
- Soulad nelze zapnout nebo vypnout, pokud se provádí pohyb async nebo mísení pohybu.
- Při zapnutí příkazu compliance je povolen pouze lineární pohyb. Společné návrhy, jako jsou MoveJ a MoveSJ, nejsou povoleny.
- Při zapnutí příkazu compliance nelze změnit hmotnost nástroje nebo TCP.
- Během provádění příkazu Compliance je možné dosáhnout cílového bodu nepřesně kvůli dodržení točivého momentu generovaného během provádění pohybu. Proto se doporučuje zapnout kontrolu dodržování předpisů v blízkosti cílového bodu. Nebo je možné minimalizovat chybu pozice nastavením velké hodnoty tuhosti.
Řízení síly
Řízení síly je funkce, která působí silou ve směru řízení síly, dokud není nastavená síla a odpuzující síla vyrovnaná
- Pohybuje robotem ve směru nastavené síly, a pokud je proveden kontakt s objektem, udržuje zadanou sílu (N)
- Je schopen řízení pohybu ve směru odlišném od směru síly při použití konstantní síly
- Minimální nastavení je +/- 10N a lze jej doladit s rozlišením 0.2N
- V singularitní zóně není funkce Force Control k dispozici
- Obecně platí, že kontrola shody se používá ve spojení s regulací síly, aby kontrola síly odpovídala vnější síle
Poznámka
Z vlastnosti příkaz síla lze nastavit následující hodnoty.
- Režim
- Zapnuto: Aktivuje kontrolu síly
- Vypnuto: Deaktivuje kontrolu síly
- Požadovaný rozsah síly
- X, Y, Z: 10 - (maximální počet robotů) N.
- A, B, C: 5 - (maximální počet každého robota) Nm
- Další informace o maximální síle naleznete v části Horní/dolní prahové hodnoty a výchozí hodnoty bezpečnostních parametrů.
- Směr cíle
- Přesune se na vybranou cílovou hodnotu každého směru.
- Lze provést několik výběrů.
- Řízení síly lze provádět pouze s nastavením směru po nastavení síly.
- Pokud jeden z více vybraných směrů dosáhne cílové síly, bude pokračovat v pohybu, dokud nebude dosaženo cílové hodnoty pro druhý směr.
- Relativní režim
- Pokud je tento režim aktivován, kalibruje vnější sílu aplikovanou na robota na 0, aby se zlepšila přesnost řízení síly.
- Pokud je relativní režim deaktivován, skutečná síla působící na cíl se rovná součtu nastavené síly a vnější síly.
- Je-li povolen relativní režim, skutečná síla působící na cíl se rovná nastavené síle.
- Během kontroly síly může dojít k odchylce v závislosti na poloze nebo vnější síle.
- Během kontroly síly je možné dosáhnout přesného cílového bodu. Proto se doporučuje povolit kontrolu síly v blízkosti cílového bodu.
- Pokud je tento režim aktivován, kalibruje vnější sílu aplikovanou na robota na 0, aby se zlepšila přesnost řízení síly.
- Nastavení času
- Je to čas potřebný pro dosažení nastavené hodnoty síly (0-1s).