
Obrazovka JOG
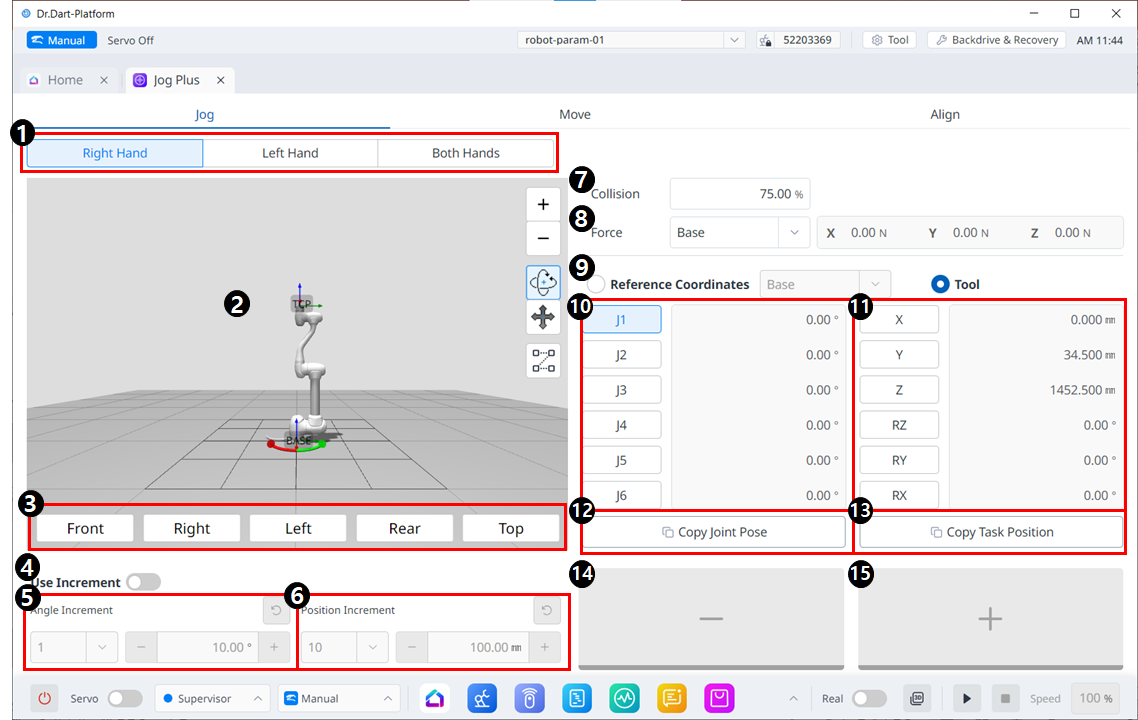
Rozložení nabídky Jog
| Položka | Popis | |
|---|---|---|
| 1 | Vyberte typ panelu | Můžete si vybrat umístění tlačítka pro přesun. |
| 2 | 3D simulace | This is the 3D viewer, where you can see how the robot looks. |
| 3 | Zarovnání simulátoru | Tuto sekci můžete využít k řízení simulátoru. |
4 | Použijte Přírůstek | Toto tlačítko umožňuje aktivovat přírůstky úhlu nebo polohy. |
| 5 | Přírůstek úhlu | V této části se nastavuje přírůstek úhlu na vybrané ose. |
| 6 | Pozice přírůstek | V této části se nastavuje přírůstek polohy na vybrané ose. |
| 7 | Kolize | Toto pole je místo, kde nastavujete kolizi robota. |
| 8 | Sledování síly | V této části nastavujete síly v osách X, Y a Z na základě základny, nástroje, světa, reference a dalších. |
| 9 | Vyberte referenční souřadnicový systém | Vyberte referenční souřadnicový systém pro zobrazení nebo posunutí souřadnic úlohy na obrázku 11. Mohou to být základní, světové nebo uživatelské souřadnice. |
| 10 | Spojovací panel | Můžete vybrat osu spoje, kterou chcete posouvat. |
| 11 | panel úloh | Můžete vybrat osu úlohy, kterou chcete posouvat. |
| 12 | Tlačítko Copy Pose J | Tlačítko Copy Pose J |
| 13 | opírovat tlačítko Pose X | pírovat Pose X. |
| 14 | Přesunout - Tlačítko | Můžete nechat robota pohybovat se ve směru - na základě každé osy. V tuto chvíli můžete zjistit směr - a + na 3D simulaci na levé straně. |
| 15 | Přesunout + tlačítko | Můžete nechat robota pohybovat se ve směru + na základě každé osy. V tuto chvíli můžete zjistit směr - a + na 3D simulaci na levé straně. |