
Nastavení střed nástroje (TCP)
Když konfigurujete střed nástroje (TCP), musí se na základě souřadnic příruby definovat také poloha a rotační úhel. Vzdálenost od výchozího počátečního bodu přírubových souřadnic ke středovému bodu nástroje (TCP) ve směru osy X, Y a Z nelze nastavit na hodnotu větší než 10000 mm. Navíc, pokud jsou převedené délky (
Zvláště pokud se TCP nakonfiguruje pomocí Automatického výpočtu, výpočet se provede pouze na základě poloh X, Y a Z, takže je nutné zadat rotační úhel. Rotační úhel lze nadefinovat pomocí položek A, B a C, a je založen na rotační metodě Euler Z-Y-Z.
Definice souřadnicových os vyjádřených písmeny x, y, z a definice souřadnicových os vyjádřených písmeny X, Y, Z jsou následující:
- Souřadnicová osa „Souřadnice příruby“ (x, y, z): Směr souřadnicové osy definovaný na konci příruby je shodný se souřadnicemi robota, který má úhel kloubu (0,0,0,0,0,0).
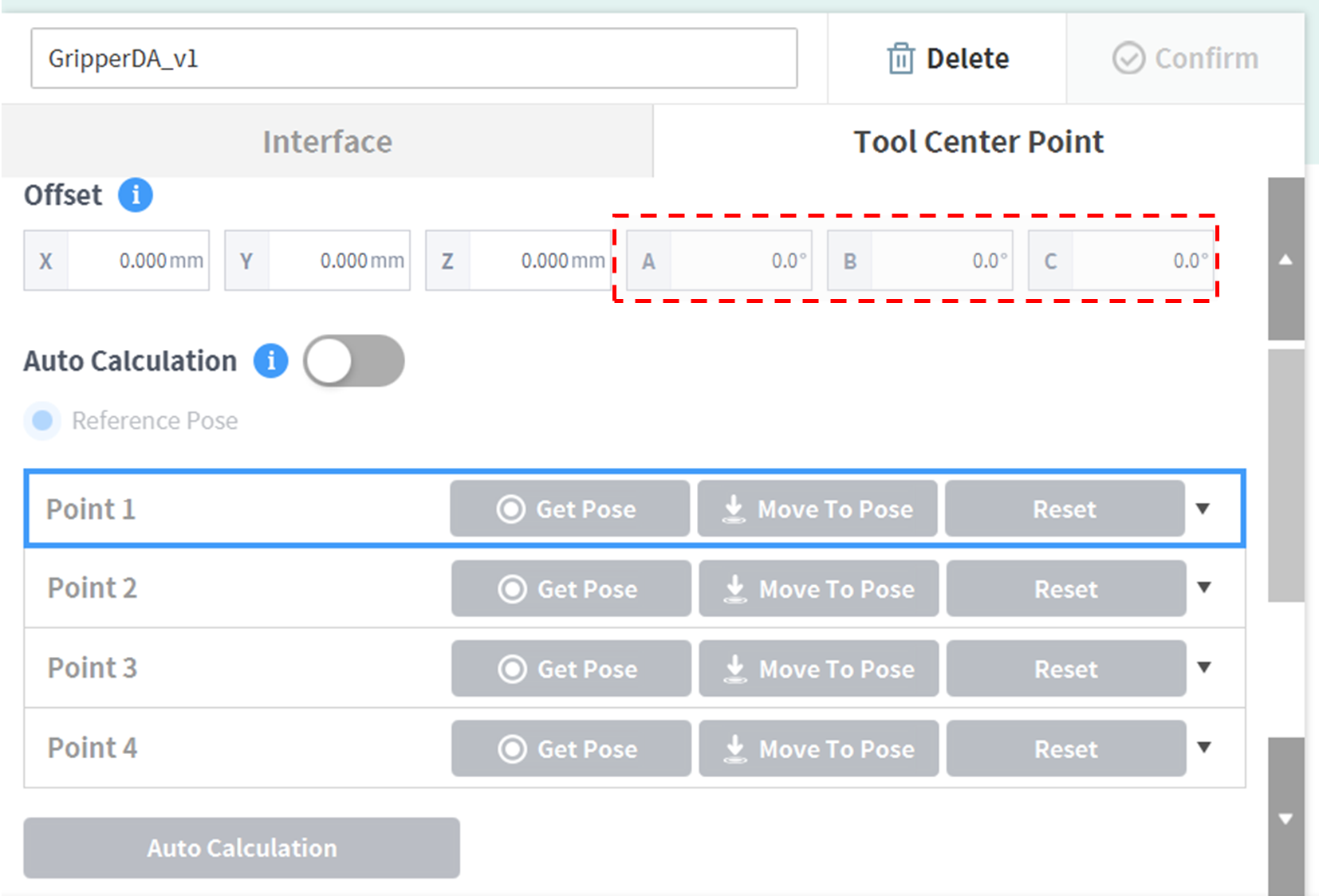
- Souřadnicová osa „Souřadnice TCP“ (X,Y,Z): Souřadnicová osa je definovaná na konci nástroje nainstalovaného na konci příruby nebo na pracovním bodě. Rotační úhel „Souřadnice TCP“ je definován na „Souřadnici příruby“ v pořadí od 1) do 3) následovně:
1) Otočí o A stupňů podél osy „z“ Souřadnic příruby
2) Otočí o B stupňů podél osy „y“ souřadnice otočené podle bodu 1)
3) Otočí o C stupňů podél osy „z“ souřadnice otočené podle bodu 2)
Následuje několik příkladů konfigurace TCP podle metody popsané výše:
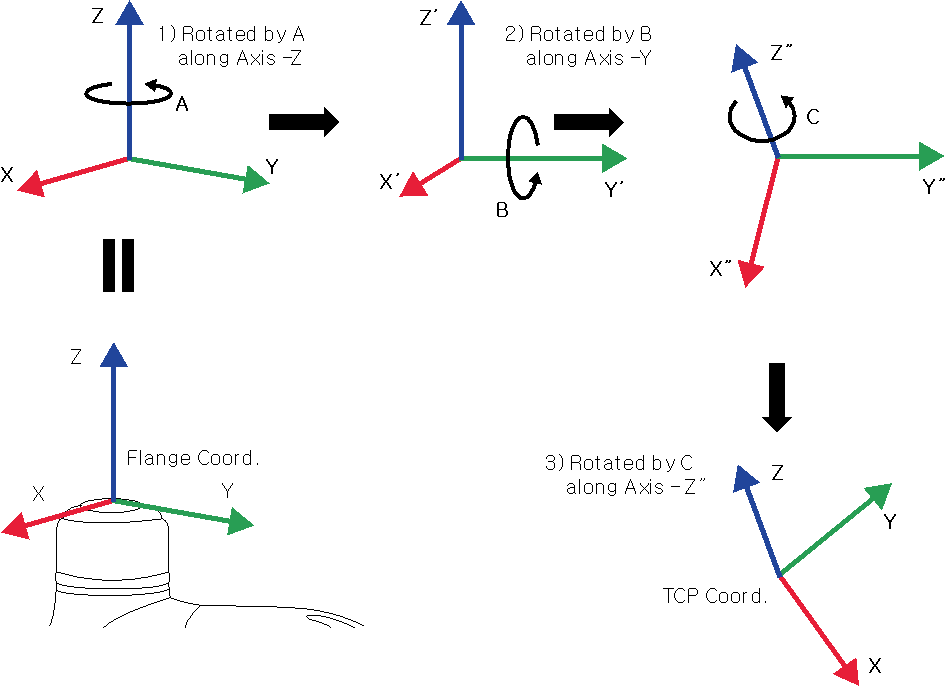
- [X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0]: Obecný uchopovač s ofsetem ve směru osy Z (TCP Coord)
- [X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0]: Levý uchopovač s úhlem 45 stupňů (TCP Coord. L)
- [X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0]: Pravý uchopovač s úhlem 45 stupňů (TCP Coord. R)