
Co je to singularita?
Singularita v robotovi s více spoji se vztahuje k pozici (nebo bodu), kde má robot potíže s výpočtem své další pozice během pohybu. Vícekloubové roboty vypočítávají každý úhel spoje během pohybu na základě konce robota
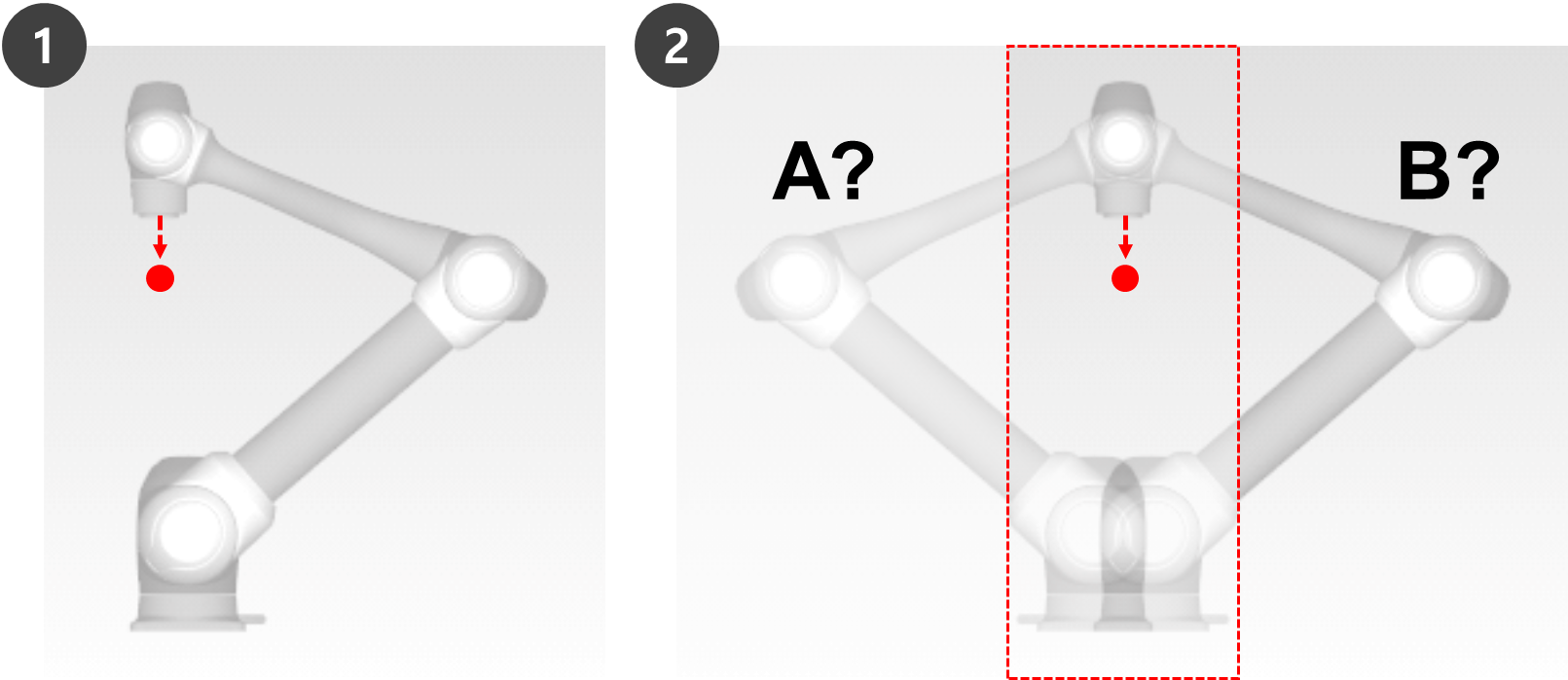
Například na obr. 1 níže, když se robot pohybuje na červenou tečku, robot nebude schopen určit, zda se jeho klouby přesunou do polohy A nebo pozice B, jak je znázorněno na obrázku. 2. Tato poloha (nebo bod) se nazývá singularita.
V blízkosti singularity není pohyb robota plynulý z hlediska roviny, bodu a linie, lineární pohyb konce robota nemusí být udržován a chyba polohy během ovládání se může zvýšit. K singularitě dochází ve třech případech, jak je znázorněno na následujícím obrázku, včetně případů, kdy spoje robota tvoří čáru.
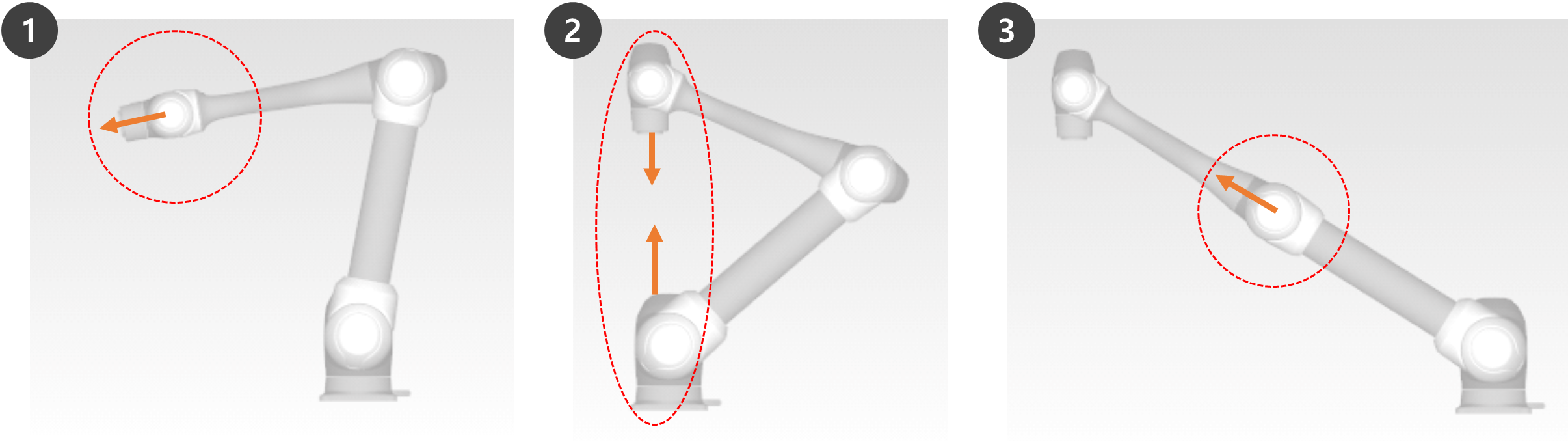
Jedinečnost zápěstí: Když zápěstí robota tvoří čáru, jak se osa 5 blíží 0°
- V porovnání s lidským ramenem odpovídají osy 4, 5 a 6 zápěstním kloubům.
- Ramenní jedinečnost: Když jsou osy 1 a 6 na stejné čáře
- V porovnání s lidskou rukou odpovídají osy 1 a 2 ramennímu kloubu.
- Koleno – Singularita: Když robot vytvoří čáru, jak se osa 3 blíží 0°
- Ve srovnání s lidským ramenem odpovídá osa 3 lokti.
Pozor
Ruční a automatické operace pohybující se s otáčením kloubu nejsou ovlivněny singularitou.
- Pohyb úkolu, příkaz MoveL atd.
- K singularitě dochází pouze při ručním a automatickém provozu, kdy robot ukončí lineární pohyb.
- Kloubový pohyb, povely MoveJ atd.
- V zóně singularity není k dispozici řízení síly nebo kontroly shody.
- Vzhledem k tomu, že rychlost otáčení určitých os se rychle zvyšuje, když lineární pohyb prochází singularitou, je možné, že dojde k porušení omezení rychlosti spoje nebo omezení úhlu spoje.
Jak se vyhnout singularitě
Roboti Doosan Robotics nabízejí možnosti, jak se vyhnout singularitám při řízení pohybu. Doporučujeme však nakonfigurovat úkol, který nevytváří výjimky pomocí příkazů společného pohybu, jako je MoveJ v zónách singularity.