
Vícesegmentové nastavení (trasové body)
V závislosti na pohybovém příkazu může být nutné nakonfigurovat dva nebo více trasových bodů. Každý trasový bod je označen jako segment, přičemž přidáním trasového bodu se přidá řádek do spodní části příkazu. Pohybové příkazy vyžadující dva nebo více segmentů se označují jako „vícesegmentové pohybové příkazy“.
Následuje příklad konfigurace příkazu Move SJ.
- Ve vlastnostech příkazu klepněte na tlačítko Přidat pozici.
- Segment 1 se přidá na spodní řádek příkazu Move SJ.

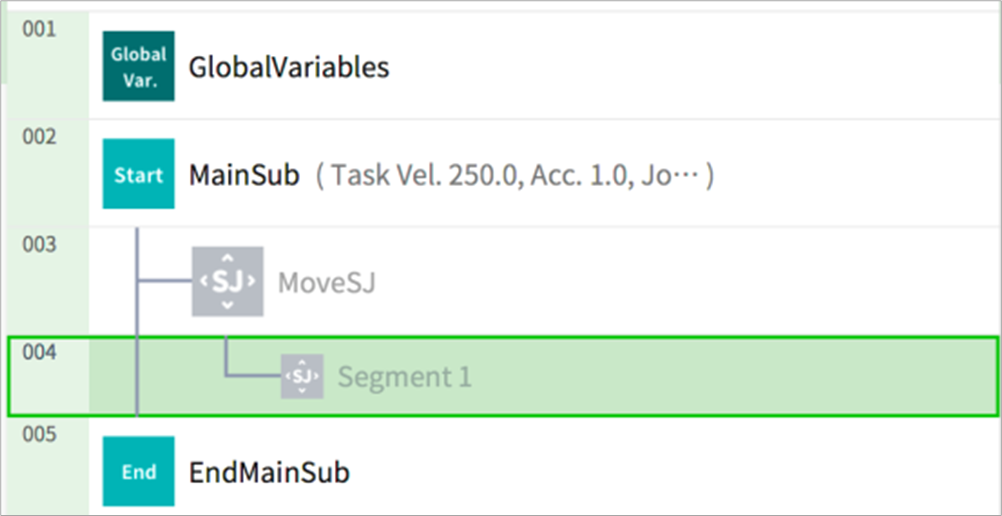
- Segment 1 se přidá na spodní řádek příkazu Move SJ.
- Použijte buď funkci pojíždění, nebo proveďte přímé učení a nástroj posuňte do požadované polohy.
- Klepnutím na tlačítko Uložit pozici ve vlastnostech segmentu uložíte polohu nástroje robota.
- Pro přidání segmentů opakujte kroky 1-3.