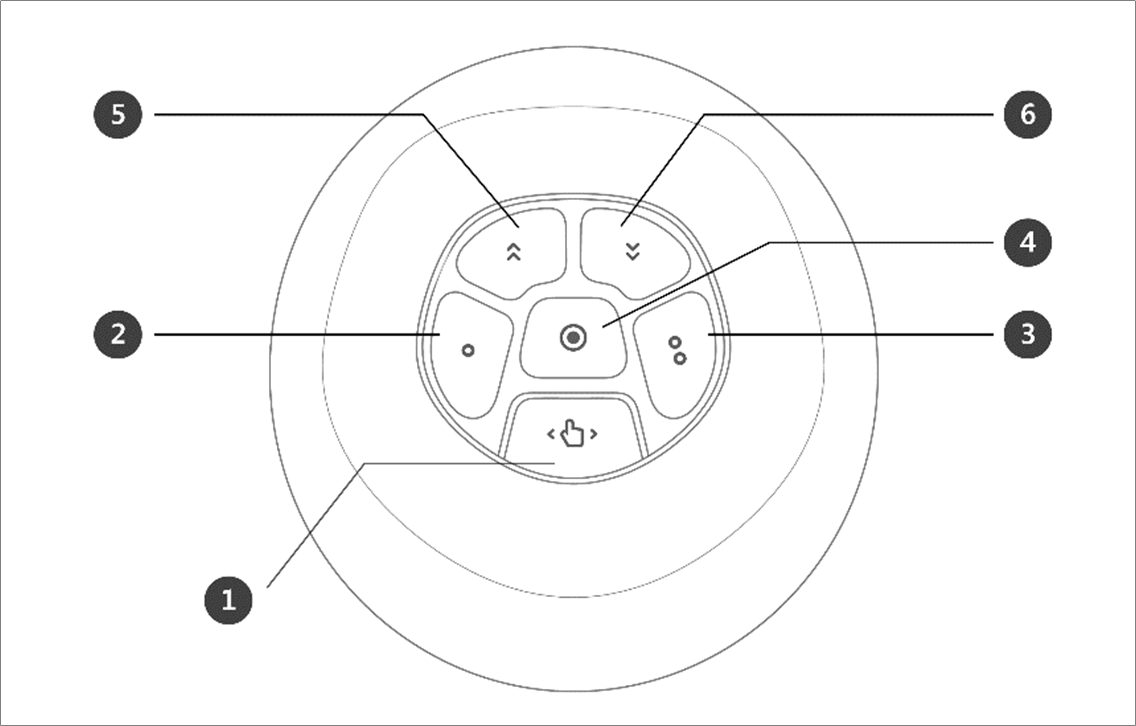
Posune Ohnisko zobrazené na obrazovce o jeden řádek nahoru.
6
One Line Down
Posune Ohnisko zobrazené na obrazovce o jeden řádek dolů.
Poznámka – změna nastavení kokpitu
Nastavení tlačítka ručního navádění atlačítka omezení pohybu potřebují 0,2 sekundy na modifikaci.
Když na obrazovce Nastavení dovednosti stisknete tlačítko Uložit pozici, ohnisko se automaticky posune do další pozice.
Tlačítko pro zrušení můžete použít pouze v okně Nastavení dovednosti, v němž se nastavuje více pozic.
Upozornění
Modely řady A bez FTS (A0509, A0912) nemohou používat pevný pohyb.
Modely řady A s FTS (A0509S, A0912S) mohou používat pevný pohyb.
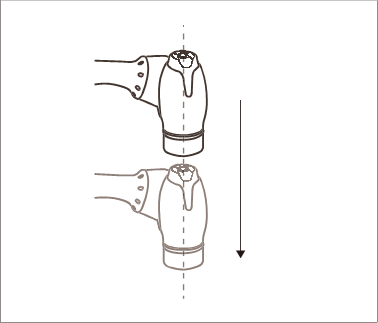
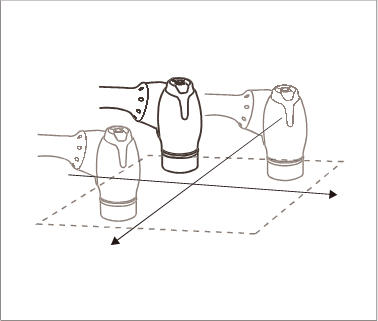
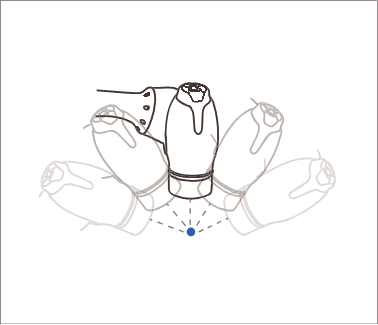
Pevný pohyb závisí na FTS připevněném k hrotu robota; proto je nezbytné, aby byl nástroj připevněn a robot jej při pohybu uchopil. Pohyb s robotem při držení těla nemusí vyvolat reakci ze strany robota.