Porozumět vlastnostem pohybu robota
POVINNÉ NORMÁLNÍ 15 MIN
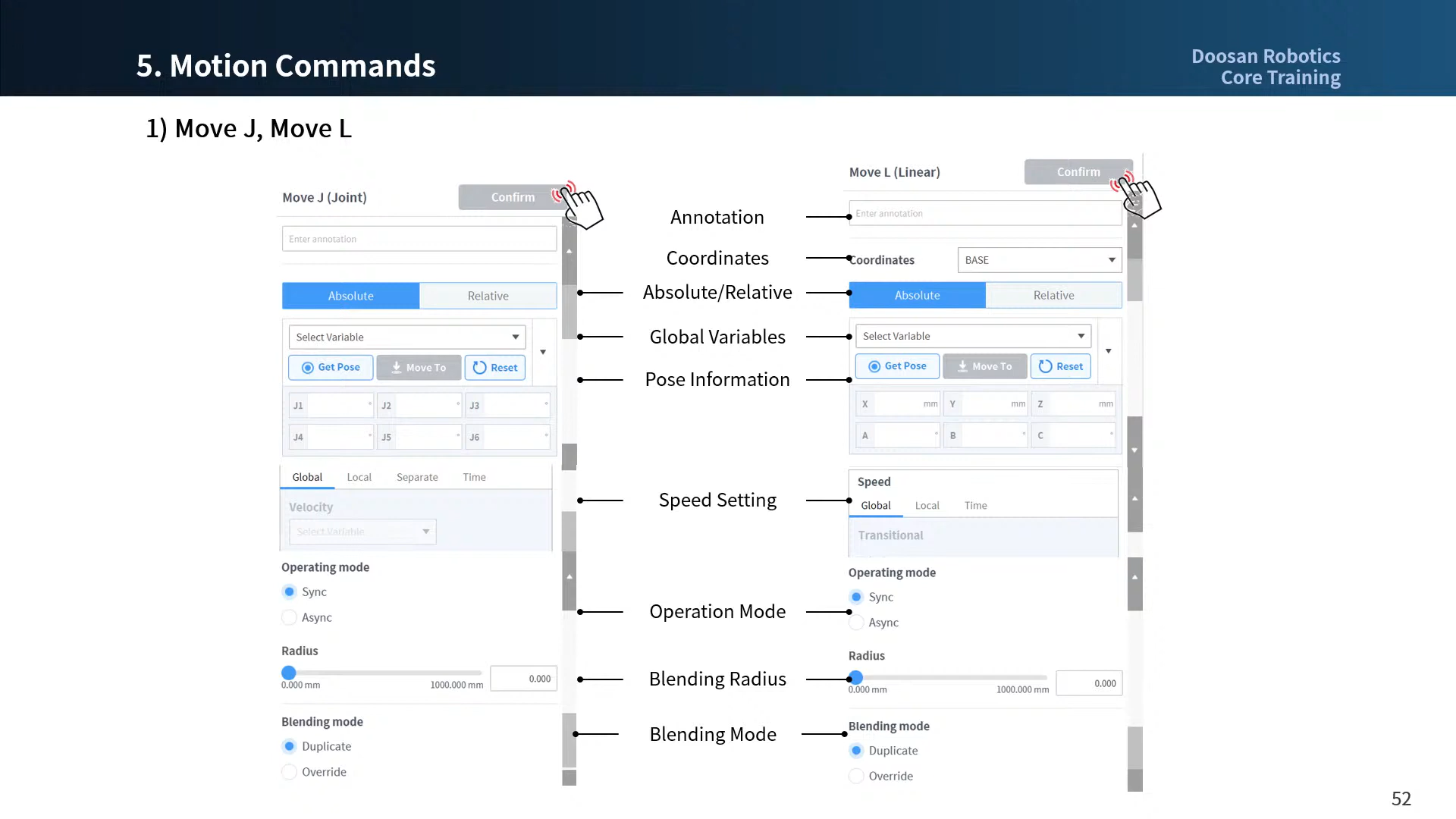
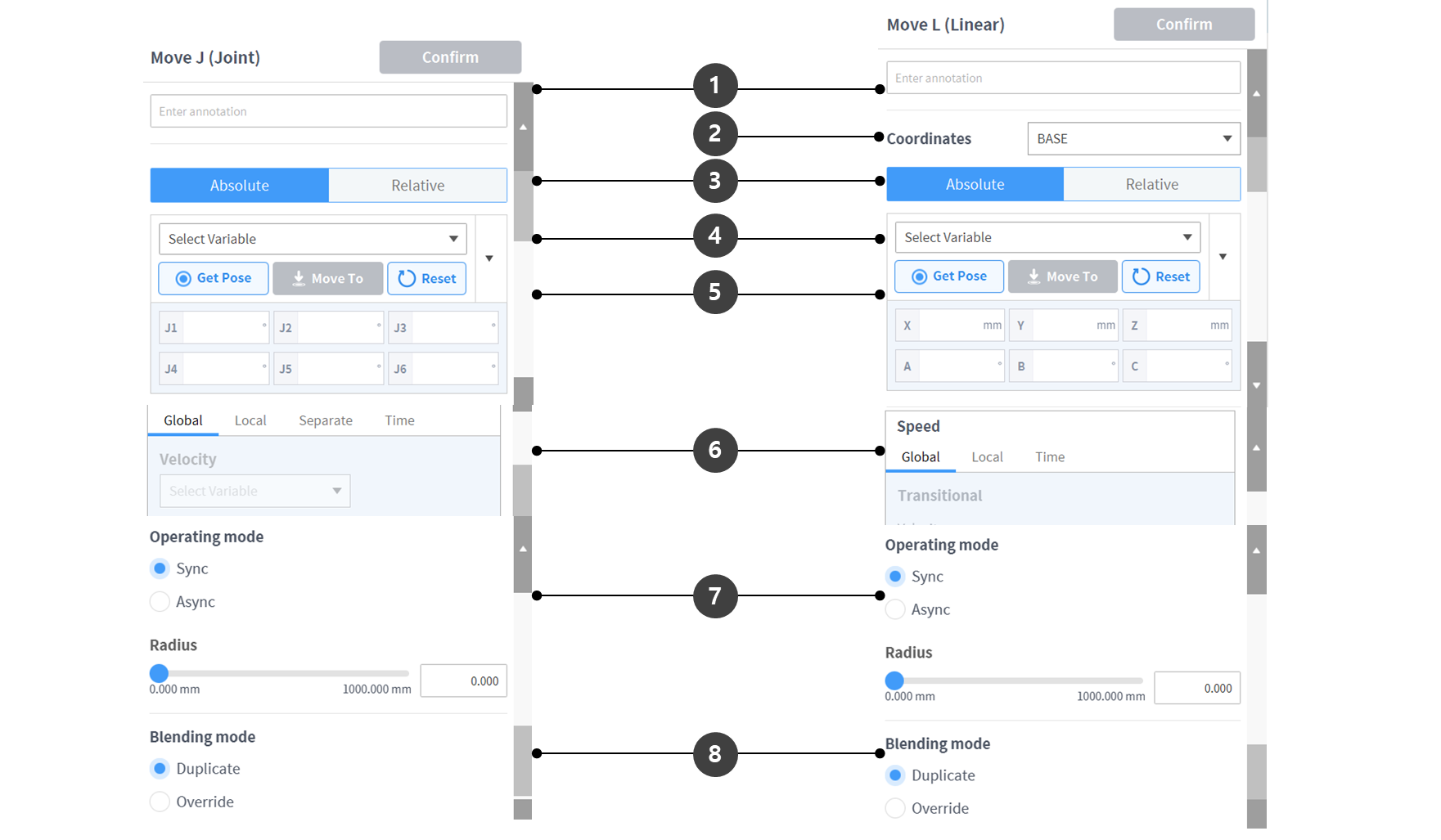
Jedná se o obrazovku vlastností standardních pohybů, MoveJ a MoveL příkazů. Jiné pohyby mají také podobné vlastnosti.
- Pokud je pohyb vytvořen s minimálním nastavením, je třeba zadat pouze informace o pozici (5 na obrázku níže).
| Jméno | Popis | |
|---|---|---|
| 1 | Anotace | Popis nebo popis příkazu, který lze nalézt v úkolovém okně |
| 2 | Souřadnice |
|
| 3 | Vyberte možnost Přesunout typ |
|
| 4 | Vyberte proměnnou | Lze vybrat informace o pozici zaregistrované jako proměnné |
| 5 | Informace o pozici | Jsou zadány informace o pozici
|
| 6 | Nastavení rychlosti |
|
| 7 | Provozní režim |
|
| 8 | Režim prolnutí | Možnost použitá k určení, zda chcete ignorovat nebo přepsat předchozí pohyb podle režimu prolnutí následujícího pohybu, pokud je poloměr nastaven jako možnost předchozího pohybu |
Provozní režim
Synchronizace
Po dokončení probíhajícího příkazu můžete přejít na další příkaz pomocí funkce synchronizace. Je nastavena jako výchozí a používá se ve všeobecných situacích.
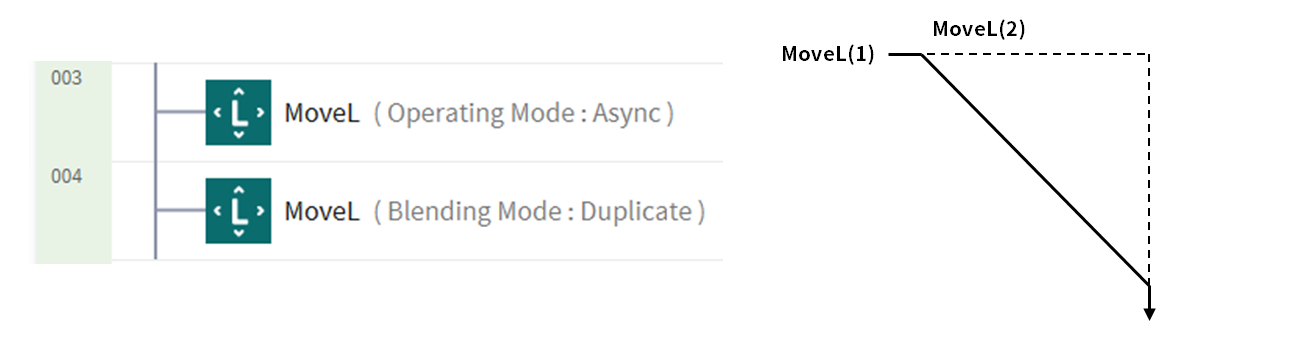
Asynchronní
Async spustí další příkaz současně, když začne příkaz pohybu. Používá se k plynulému připojení různých pohybů a používá se také při současném zapnutí/vypnutí výstupu signálu při zahájení pohybu.
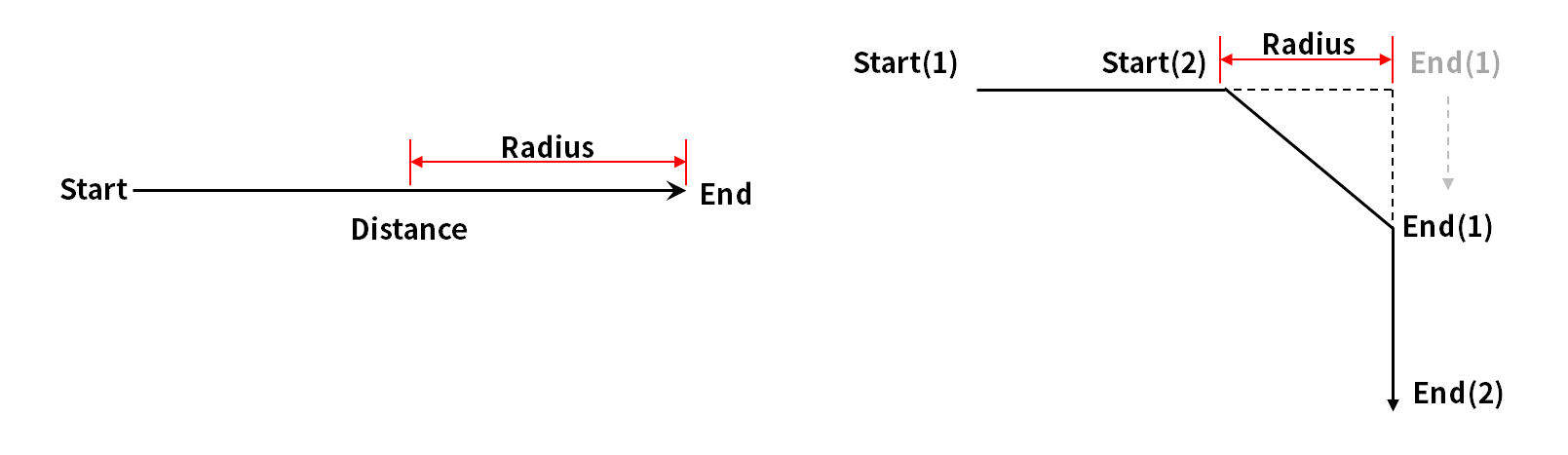
Poloměr
Volba poloměru aktivuje funkci asynchronní v části poloměru předtím, než příkaz k pohybu dosáhne cílového bodu. S touto volbou je možné plynule připojit k dalšímu příkazu pohybu bez zastavení aktuálního příkazu pohybu. Jako výchozí je poloměr nastaven na 0 mm.
Pozor
Volba poloměru má následující vlastnosti a limity:
- Funkci poloměru lze použít pouze v režimu synchronizace.
- Podmínky a výpočty lze provádět v části asynchronní v rámci poloměru.
- Poloměr nesmí překročit 1/2 celkové vzdálenosti mezi aktuálním a cílovým umístěním před provedením pohybu.
- např. Pokud je vzdálenost pohybu 100 mm, je maximální dostupný poloměr 50 mm.
- Příkazy pohybu, které nelze použít prolnutí mezi pohyby, jsou následující: Prolnutí je již použito v těchto příkazech, takže použití poloměru na tyto příkazy a jejich provedení způsobuje chyby. Použití příkazů, jako je WaitMotion a StopMotion, může pomoci vyhnout se chybám.
- MoveSX, MoveSJ, Moveperiodický, MoveSpiral, MoveB
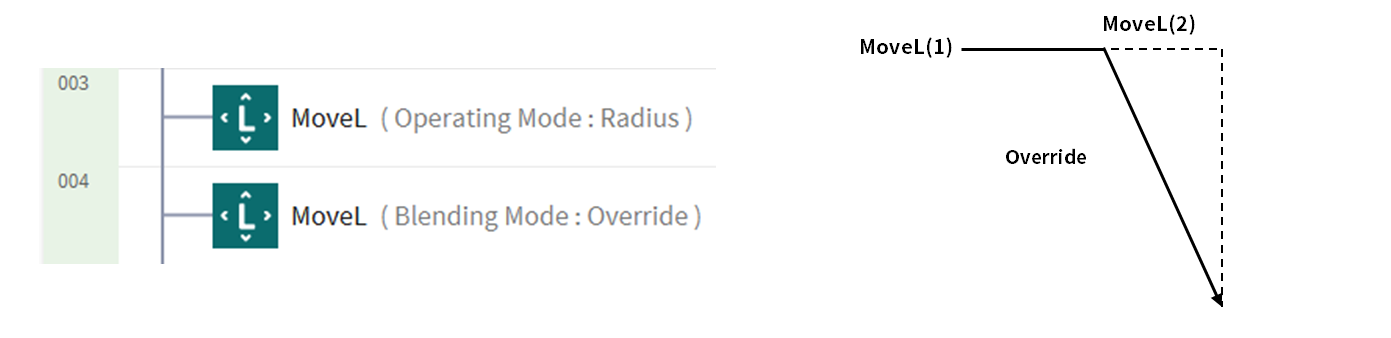
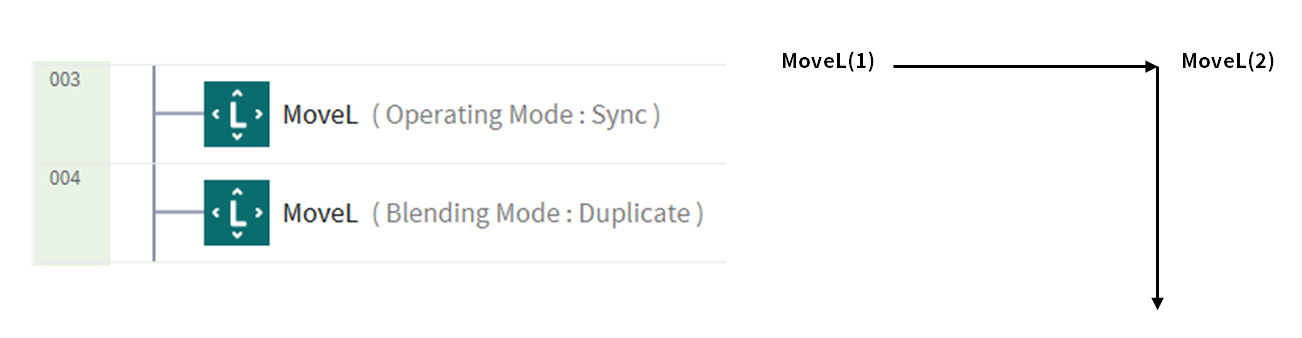
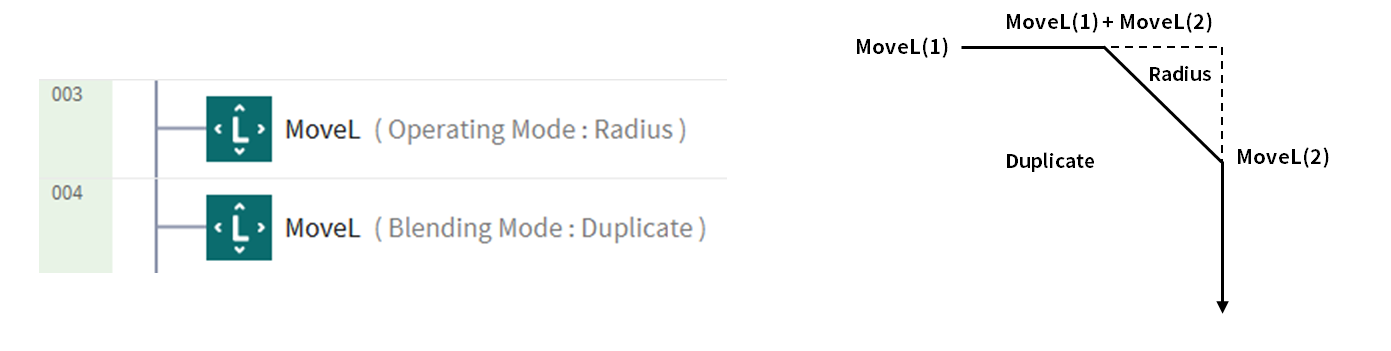
Režim prolnutí
Je to volba, která určuje, zda chcete ignorovat nebo přepsat předchozí pohyb podle režimu prolnutí následujícího pohybu, pokud je poloměr nastaven jako volba předchozího pohybu.
Duplikovat
Duplikovat je režim, který udržuje předchozí pohyb, aby se následující pohyb překrýval s předchozím pohybem.
Přepsat
Přepsání ignoruje a přepíše předchozí pohyb, aby bylo možné provést následující pohyb.