
Položka pracovní buňky – Přidat montážní pozici robota (montáž)
VOLITELNÉ SNADNÉ 3 MIN
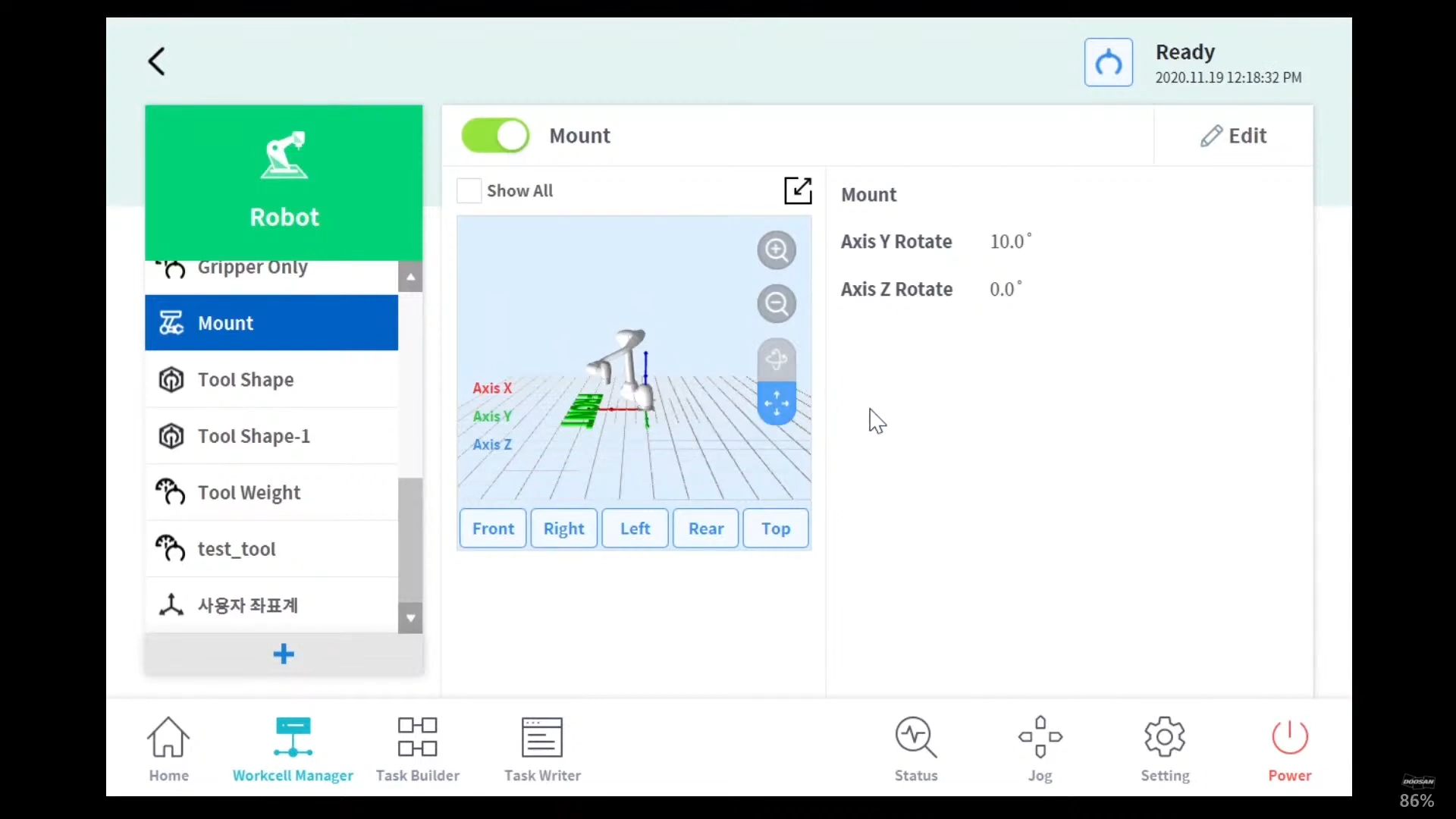
Montážní pozici robota lze nastavit přidáním položky pracovní buňky montážní pozice robota (Mount). Pokud je robot nainstalován na rovném povrchu, lze tento krok přeskočit.
Pozici instalace robota lze nastavit pomocí Správce pracovních buněk > Robot > 
- Instalační úhel lze měřit pomocí funkce automatického měření. Pokud je však úhel menší než 5 stupňů, automatické měření není k dispozici.
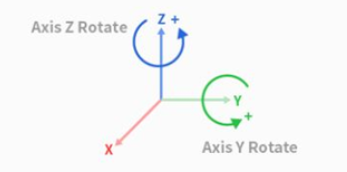
- Je-li robot instalován na strop nebo stěnu, lze úhel instalace robota nastavit pomocí rotace osy Y a osy Z.
- Protože je automatický výpočet hmotnosti nástroje proveden na základě gravitace, doporučuje se po dokončení nastavení uchycení vynulovat hmotnost nástroje.
Po registraci (potvrzení) položky pracovní buňky musí být přepínač aktivován, aby bylo možné použít položku pracovní buňky.
Pozor
- Při nastavování pozice (montáže) pracovní buňky robota se doporučuje změnit také souřadnice světa. Pokud se souřadnice světa nezmění, pozice robota na obrazovce simulátoru robota ovladače učení se zobrazí jako robot instalovaný na rovném povrchu (základní).