
Kontrola shody a kontrola kontaktu
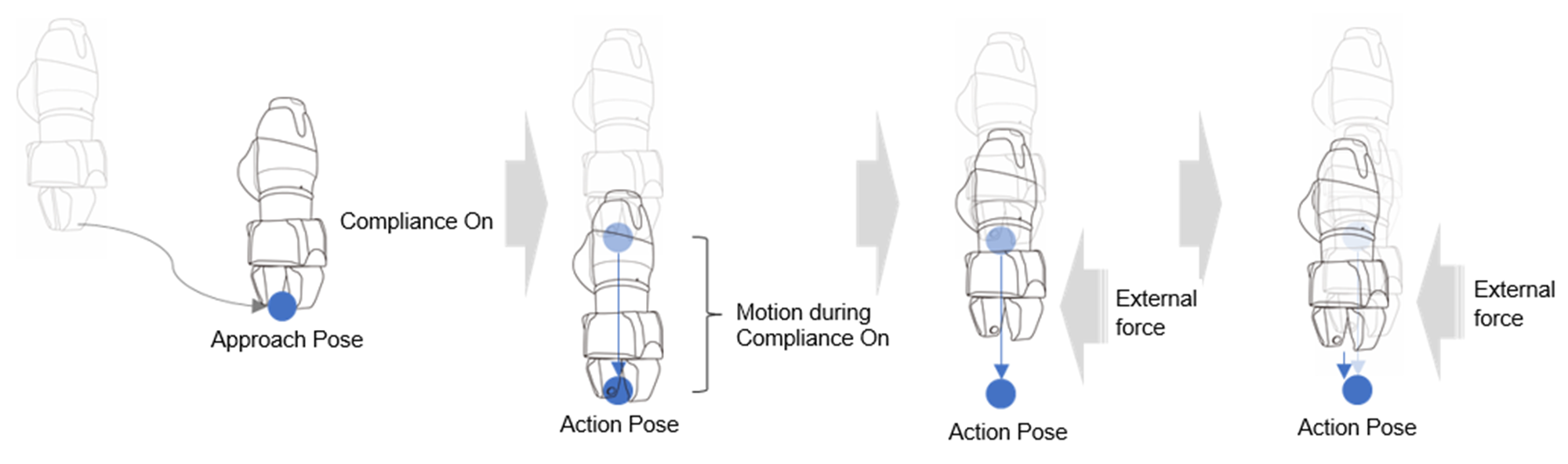
Pomocí kontroly shody a kontroly kontaktu, což jsou unikátní technologie společnosti Doosan Robotics pro ovládání síly, lze snadno provádět učení bez opakované operace pro přesné určení bodu, protože se tím během operace robota umožňuje umístit odchylku v tolerančním rozpětí mezi obrobkem a okolními položkami.
Kontrola shody: Pokud se během Přístupu à, Akce à a Retrakce aplikuje síla, umožňuje to určitou odchylku od nastavené pozice s jistou mírou volnosti jako v případě pružiny.
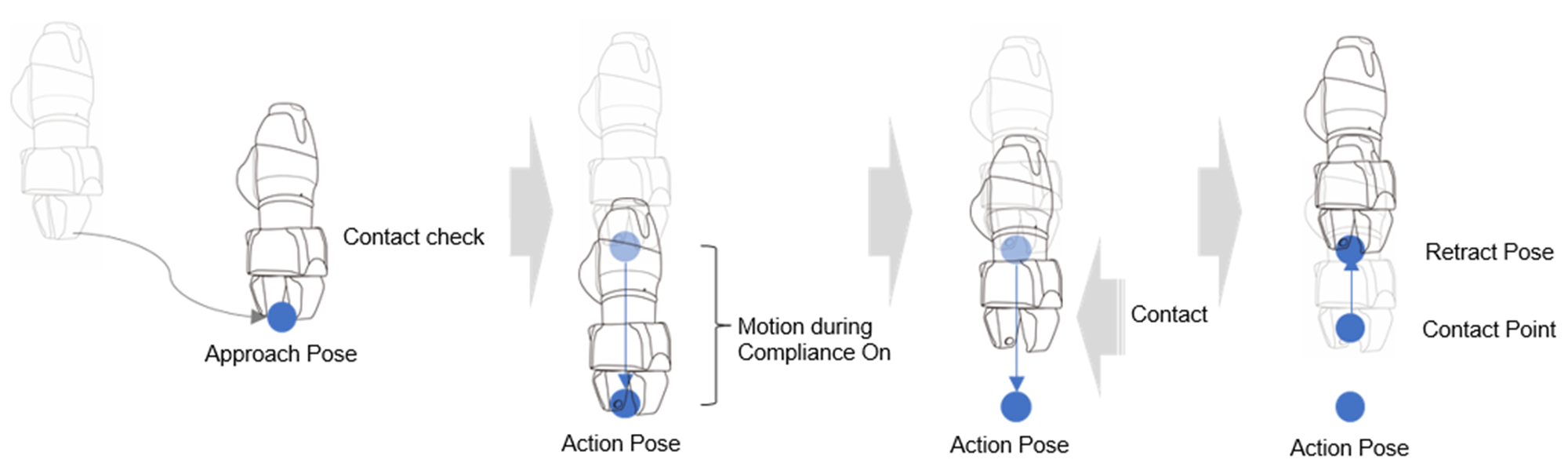
Kontrola kontaktu: Tato funkce na základě zadaných hodnot Kontaktní síla a Určující rozsah kontaktu detekuje kontakt s cílem, zastaví robota v odpovídající pozici a aktivuje uchopovač, který uchopí cíl.
- Tato funkce se musí používat ve spojení s funkcí kontroly shody. Pokud je zadána hodnota Síly a Kontrola shody není zapnuta, dojde k chybě.
- Kontakt je funkce, která detekuje kontakt s externí silou, takže citlivost Detekce kolize musí být nastavena na nízké úrovně nebo musí být Detekce kolize vypnuta.
- Při používání této funkce buďte opatrní, protože pokud je hodnota tuhosti Kontroly shody (tj. ve směru osy Z) příliš velká nebo když je pracovní rychlost příliš vysoká, může být při kontaktu s vnějším prostředím generována nadměrná síla. (Je nutné provést úpravy podle situace, a to snížením hodnoty tuhosti, pokud je pracovní rychlost příliš vysoká; nebo zvýšením tuhosti, pokud je pracovní rychlost příliš nízká.)
Poznámka
- Pokud při používání řady A není namontován FTS, funkci Detekce kontaktu nelze použít. V tomto případě je použití kontroly dodržování předpisů omezené a tuhost lze upravit pouze ve směru překladu (X, Y, Z).