
Instalace (CS-04)
Upozornění během instalace
Upozornění
- Před instalací řídicí jednotky zajistěte dostatečný prostor pro instalaci. Pokud není zajištěn dostatek místa, může dojít k poškození řídicí jednotky nebo k poškození kabelu manipulátoru nebo učícího ovladače.
- Při připojování napájení k výrobku zkontrolujte napájecí zdroj. Pokud se připojený vstupní napájecí zdroj liší od jmenovitého napájecího vstupu (22–60 V ss), produkt nemusí správně fungovat nebo může dojít k poškození řídicí jednotky.
Prostředí Instalace
Při instalaci řídicí jednotky zvažte následující.
- Před instalací řídicí jednotky zajistěte dostatečný prostor pro instalaci.
- Řídicí jednotka musí být připevněná.
- Ujistěte se, že jsou všechny součásti během instalace v přenosném mobilním zařízení pevně zafixovány.
Instalace hardwaru
Před spuštěním robota nainstalujte manipulátor, řídicí jednotku a ovladače (tlačítko nouzového vypnutí), které jsou nezbytnými prvky systému, a poté připojte napájení. Způsob instalace každé součásti je následující:
Připojení manipulátoru a řídicí jednotky
Zasuňte připojovací kabel manipulátoru do příslušného konektoru řídicí jednotky, dokud neuslyšíte cvaknutí. Díky tomu se kabel neuvolní.
Upozornění
- Neodpojujte kabel manipulátoru, když je robot zapnutý. Mohlo by to způsobit jeho poškození.
- Kabel manipulátoru neupravujte ani neprodlužujte.
- Při instalaci řídicí jednotky na podlahu zajistěte na každé straně ovladače alespoň 50 mm prostoru, aby bylo zajištěno větrání.
- Před zapnutím řídicí jednotky se ujistěte, že jsou konektory správně připojeny.
Poznámka
- Při konfiguraci systému se doporučuje nainstalovat redukci šumu, která zabrání působení šumu mezi zařízeními a poruše systému.
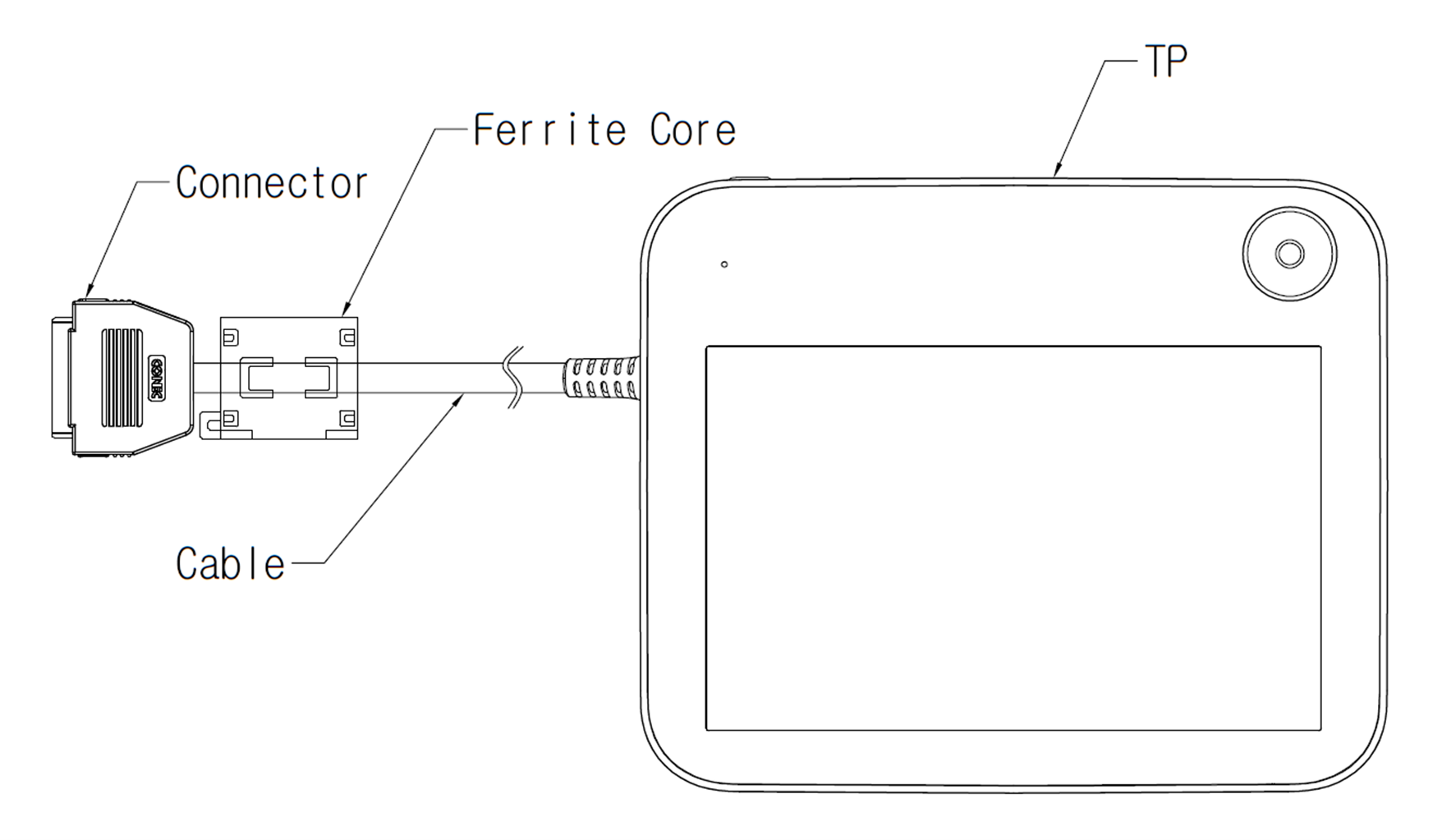
- Pokud je řídicí jednotka ovlivněna šumem generovaným elektromagnetickými vlnami, doporučuje se pro zajištění normálního provozu instalovat na každý konec kabelu manipulátoru feritová jádra. Umístění instalace jsou následující:
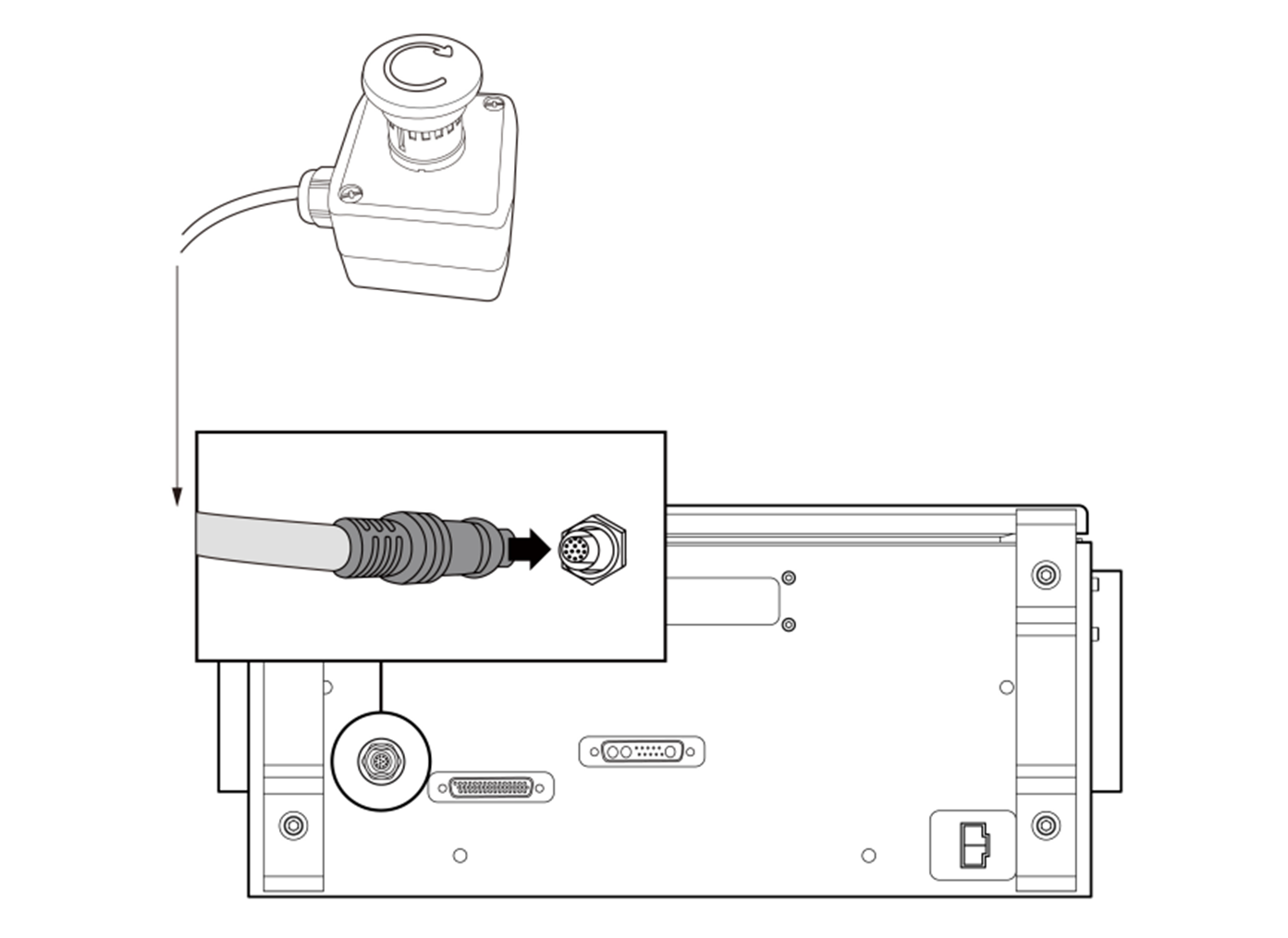
Připojení řídicí jednotky a tlačítka nouzového vypnutí
Připojte kabel tlačítka nouzového vypnutí k příslušnému konektoru řídicí jednotky a otočením ve směru hodinových ručiček zajistěte šroubový zámek, aby se kabel neuvolnil.
Varování
- Nastavte spínač nastavení tlačítka nouzového zastavení podle části „Spínač pro nastavení tlačítka nouzového nastavení“.
- Pokud se nastavení spínače liší od skutečné konfigurace, tlačítko nouzového zastavení nemusí v případě nouze fungovat správně, což by mohlo vést ke zranění. Nezapomeňte zkontrolovat nastavení a funkci tlačítka nouzového zastavení.
Upozornění
- Před připojením kabelu zkontrolujte tvar konektoru.
- Pokud je použito tlačítko nouzového zastavení, dávejte pozor, abyste nezakopli o připojovací kabely.
- Dávejte pozor, aby nedošlo k kontaktu řídicí jednotky, tlačítka nouzového vypnutí nebo kabelů s vodou.
- Řídicí jednotku ani tlačítko nouzového zastavení neinstalujte v prašném ani vlhkém prostředí.
- Řídicí jednotka ani tlačítko nouzového zastavení nesmí být vystaveny prašným podmínkám přesahujícím stupeň krytí IP40. Zvlášť opatrní buďte v prostředí s vodivým prachem.
- Během provozu robota neodpojujte tlačítko nouzového zastavení.
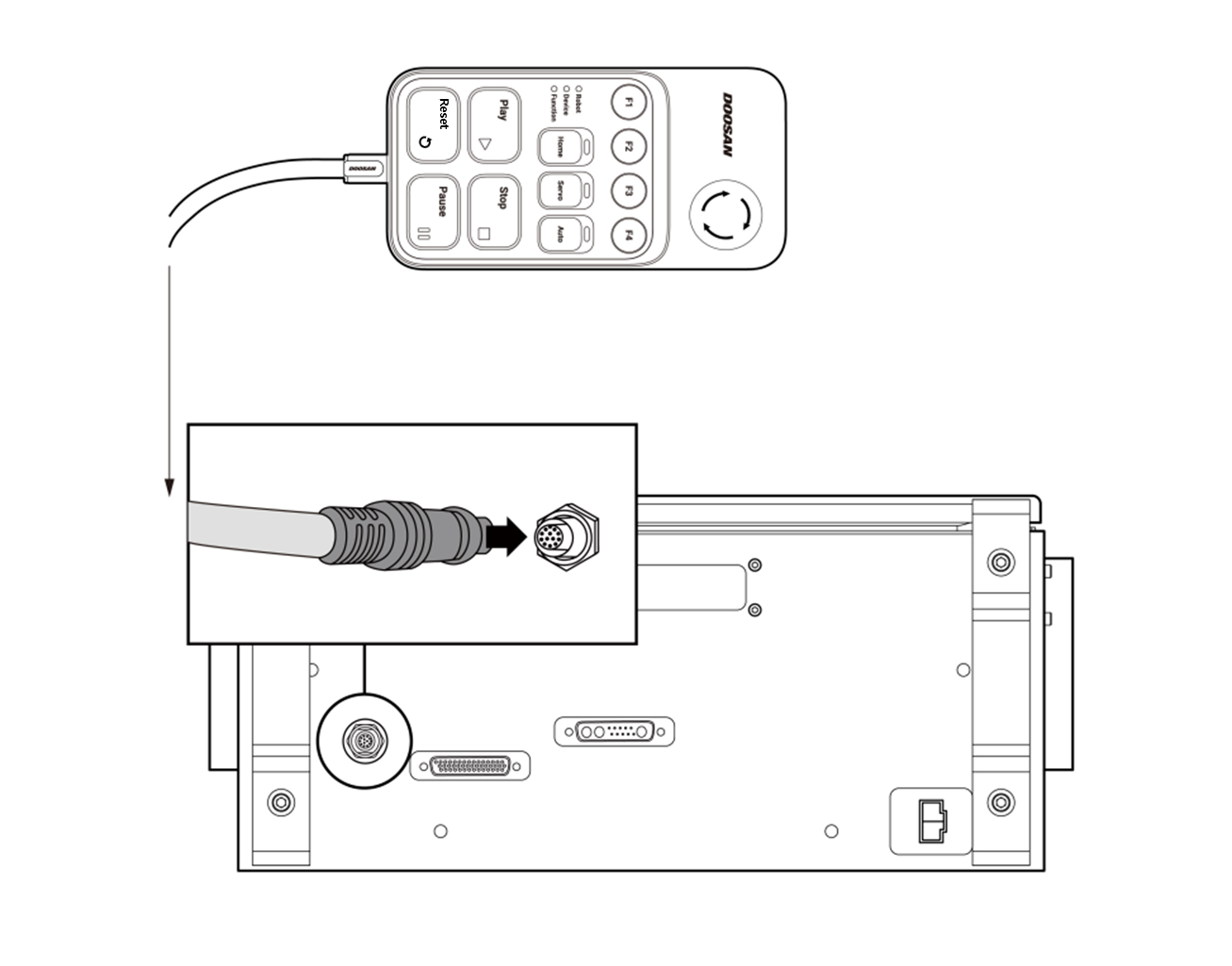
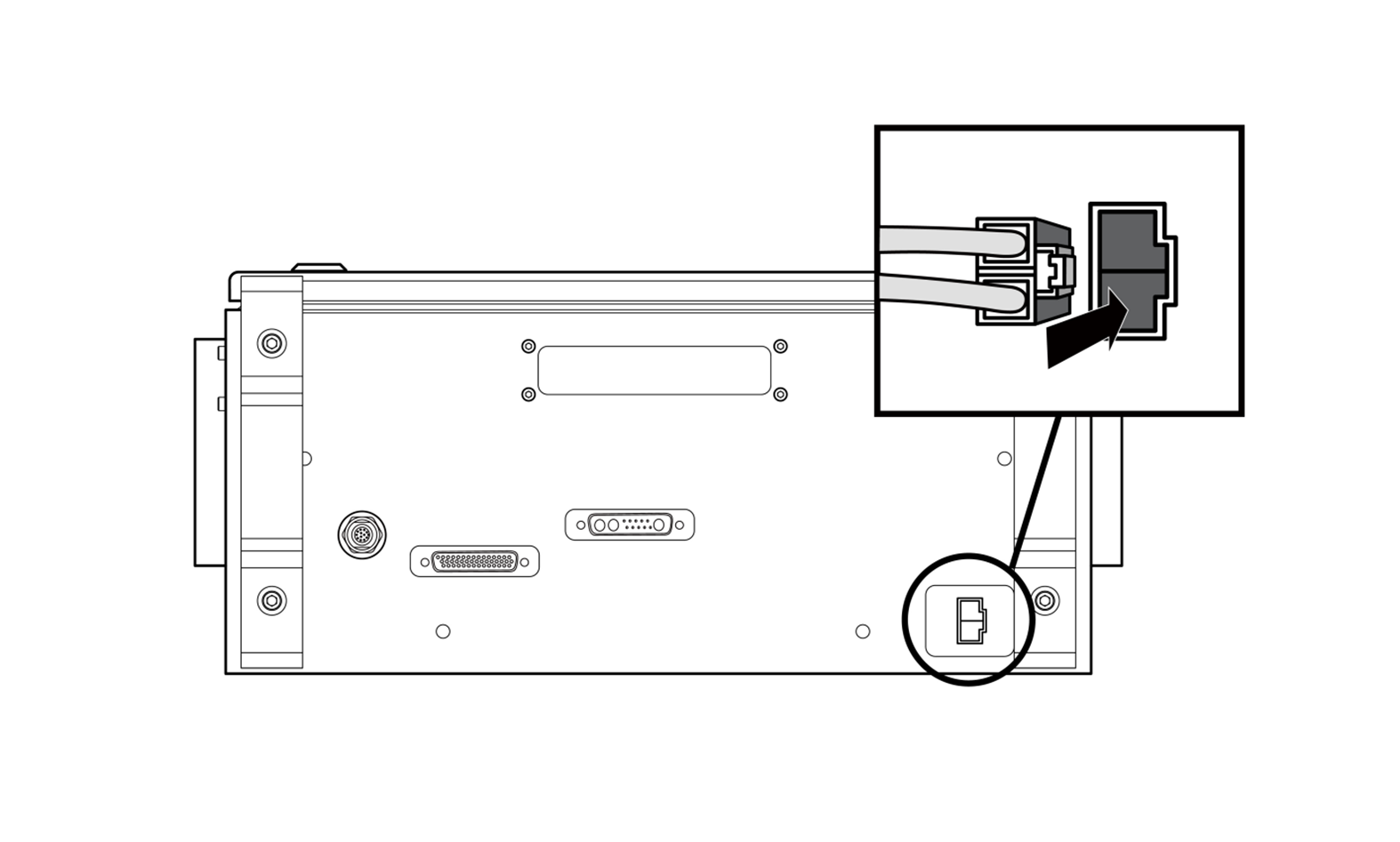
Připojení řídicí jednotky a chytrého ovladače
Kabel chytrého ovladače přpojte k odpovídajícímu konektoru řídicí jednotky a otočením ve směru hodinových ručiček zajistěte šroubový zámek, aby se kabel neuvolnil.
Varování
- Nastavte spínač nastavení tlačítka nouzového zastavení podle části „Spínač pro nastavení tlačítka nouzového nastavení“. Pokud se přepínač nastavení tlačítka nouzového vypnutí liší od skutečné konfigurace, tlačítko nouzového vypnutí nemusí v případě nouze fungovat správně, což by mohlo vést ke zranění. Nezapomeňte zkontrolovat nastavení a funkci tlačítka nouzového zastavení.
Upozornění
- Před připojením kabelu zkontrolujte, zda nejsou kolíky na konci kabelu poškozené nebo ohnuté.
- Pokud se chytrý ovladač používá se zavěšením na zeď nebo na řídicí jednotku, dávejte pozor, abyste nezakopli o připojovací kabely.
- Dbejte na to, aby se řídicí jednotka, chytrý ovladač ani kabely nedostaly do kontaktu s vodou.
- Řídicí jednotku ani chytrý ovladač neinstalujte v prašném ani vlhkém prostředí.
- Řídicí jednotka ani chytrý ovladač nesmí být vystaveny prašným podmínkám přesahujícím stupeň krytí IP20. Zvlášť opatrní buďte v prostředí s vodivým prachem.
- Zajistěte, aby zakřivení kabelu chytrého ovladače bylo větší než minimální poloměr zakřivení (120 mm).
Poznámka
- Při konfiguraci systému se doporučuje nainstalovat redukci šumu, která zabrání působení šumu mezi zařízeními a poruše systému.
- Pokud je chytrý ovladač ovlivněn rušením v podobě elektromagnetických vln, je nutné instalovat feritové jádro, aby se tak zajistil normální provoz. Umístění instalace jsou následující:
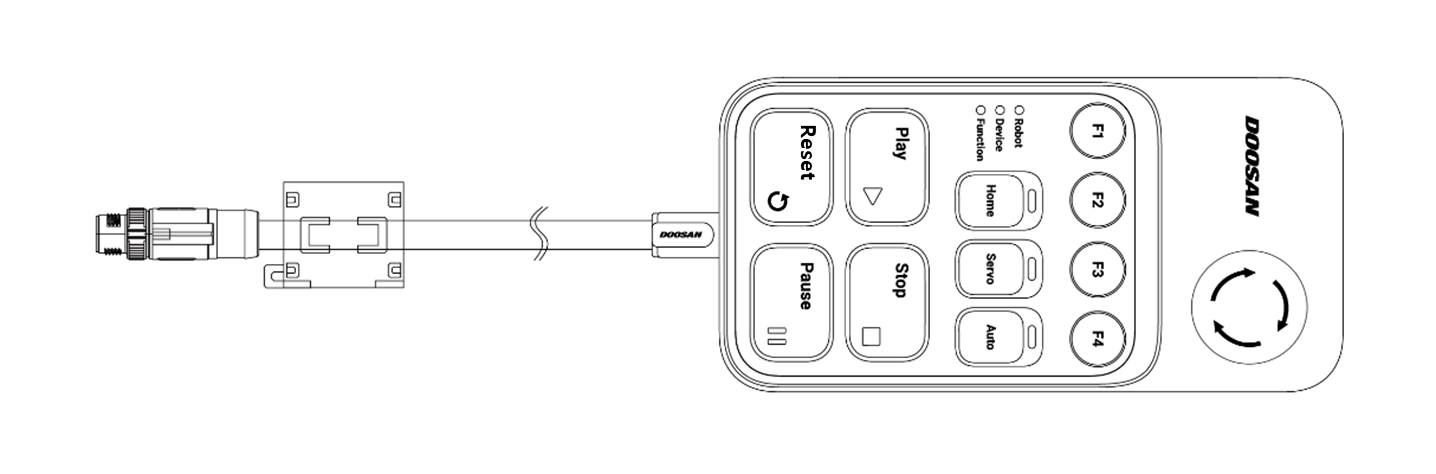
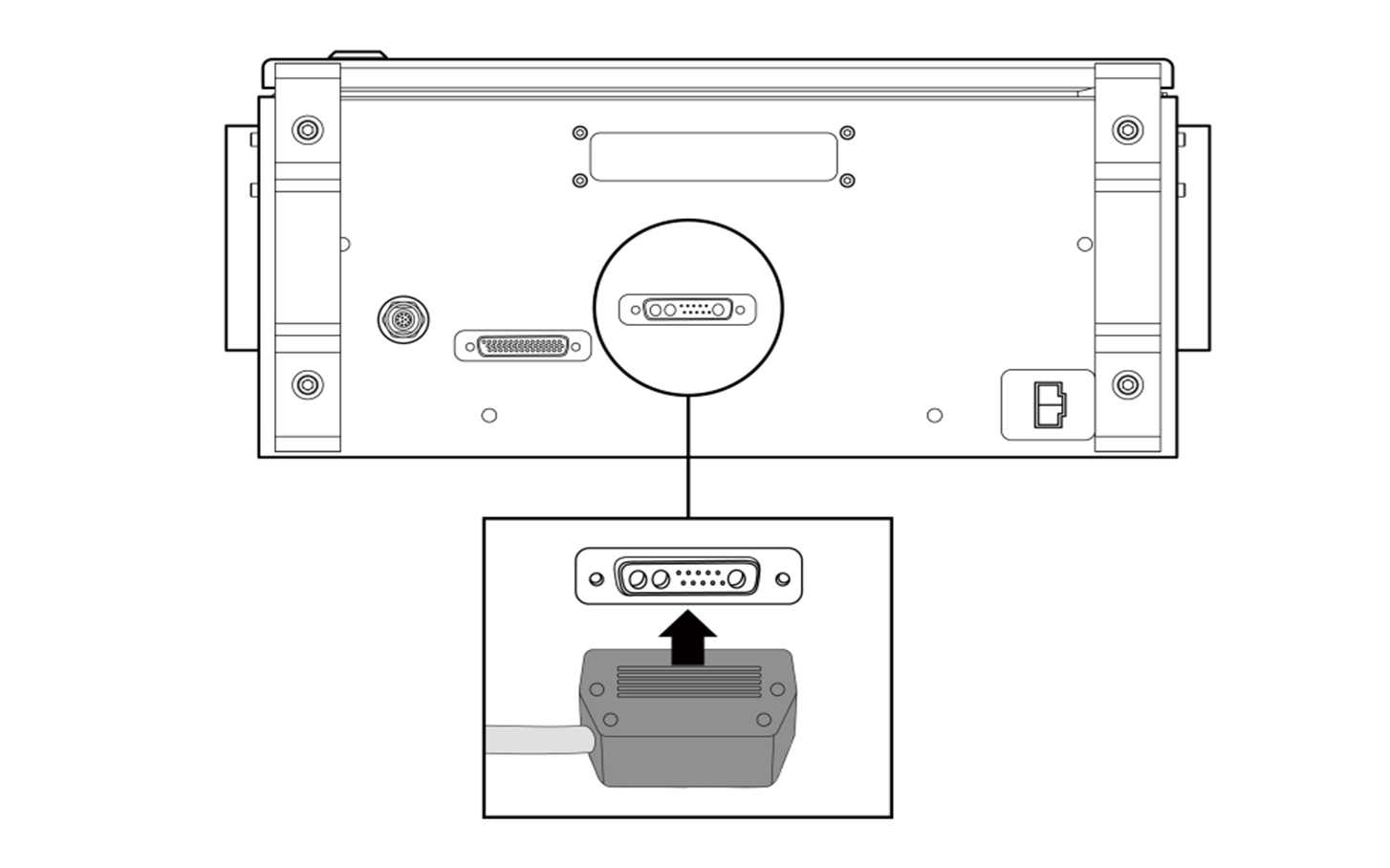
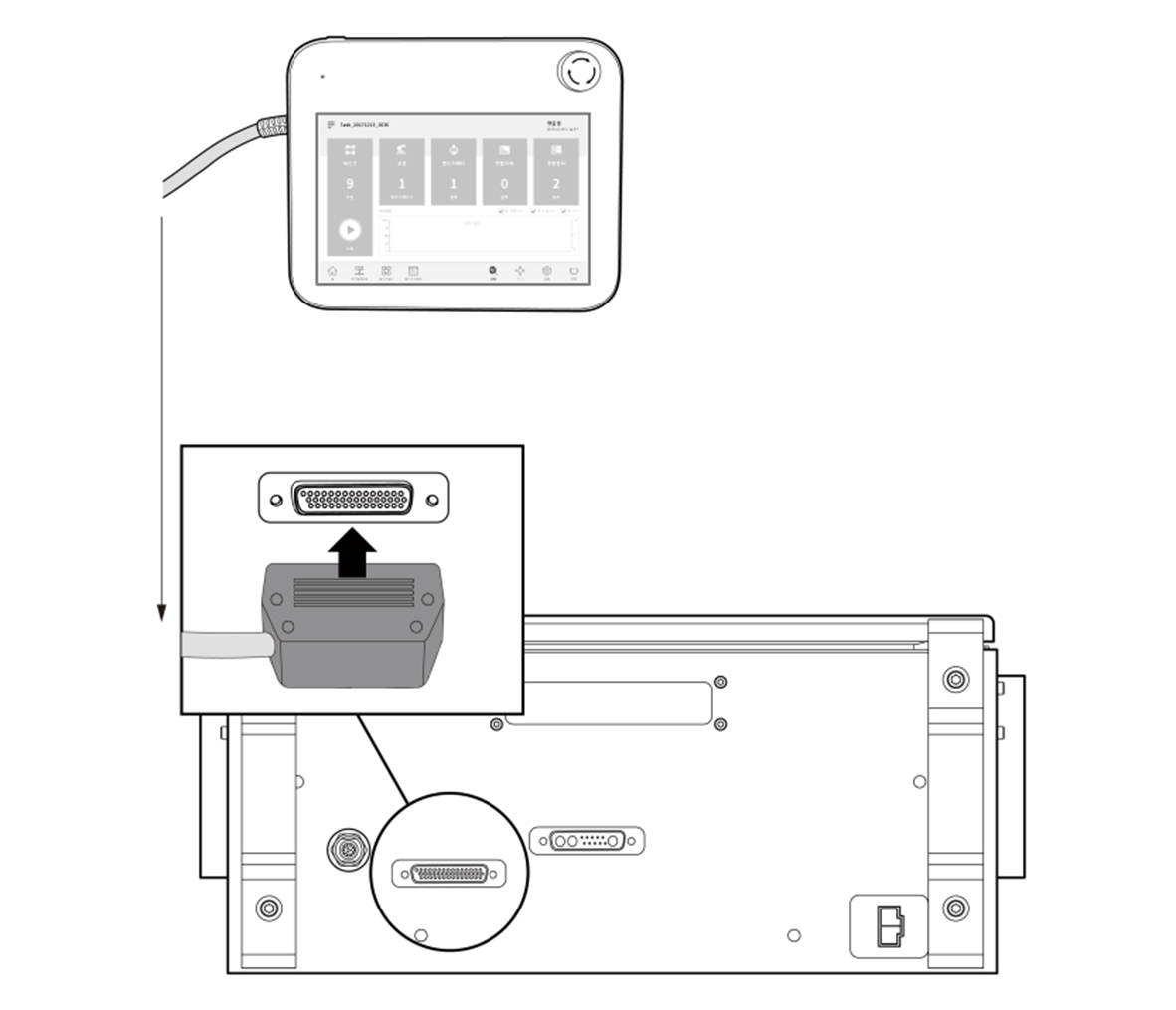
Připojení řídicí jednotky a učícího ovladače
Zasuňte připojovací kabel učícího ovladače do příslušného konektoru řídicí jednotky, dokud neuslyšíte cvaknutí. Díky tomu se kabel neuvolní.
Varování
- Nastavte spínač nastavení tlačítka nouzového zastavení (řada A) podle pokynů v části „Spínač pro nastavení tlačítka nouzového nastavení“. Pokud se přepínač nastavení tlačítka nouzového vypnutí liší od skutečné konfigurace, tlačítko nouzového vypnutí nemusí v případě nouze fungovat správně, což by mohlo vést ke zranění. Nezapomeňte zkontrolovat nastavení a funkci tlačítka nouzového zastavení.
Upozornění
- Před připojením kabelu zkontrolujte, zda nejsou kolíky na konci kabelu poškozené nebo ohnuté.
- Pokud se učící ovladač používá se zavěšením na zeď nebo na řídicí jednotku, dávejte pozor, abyste nezakopli o připojovací kabely.
- Dbejte na to, aby se řídicí jednotka, učící ovladač ani kabel nedostaly do kontaktu s vodou.
- Řídicí jednotku ani učící ovladač neinstalujte v prašném ani vlhkém prostředí.
- Ovládací skříň ani učící ovladač nesmí být vystaveny prašnému prostředí, které přesahuje krytí IP20. Zvlášť opatrní buďte v prostředí s vodivým prachem.
Poznámka
- Při konfiguraci systému se doporučuje nainstalovat redukci šumu, která zabrání působení šumu mezi zařízeními a poruše systému.
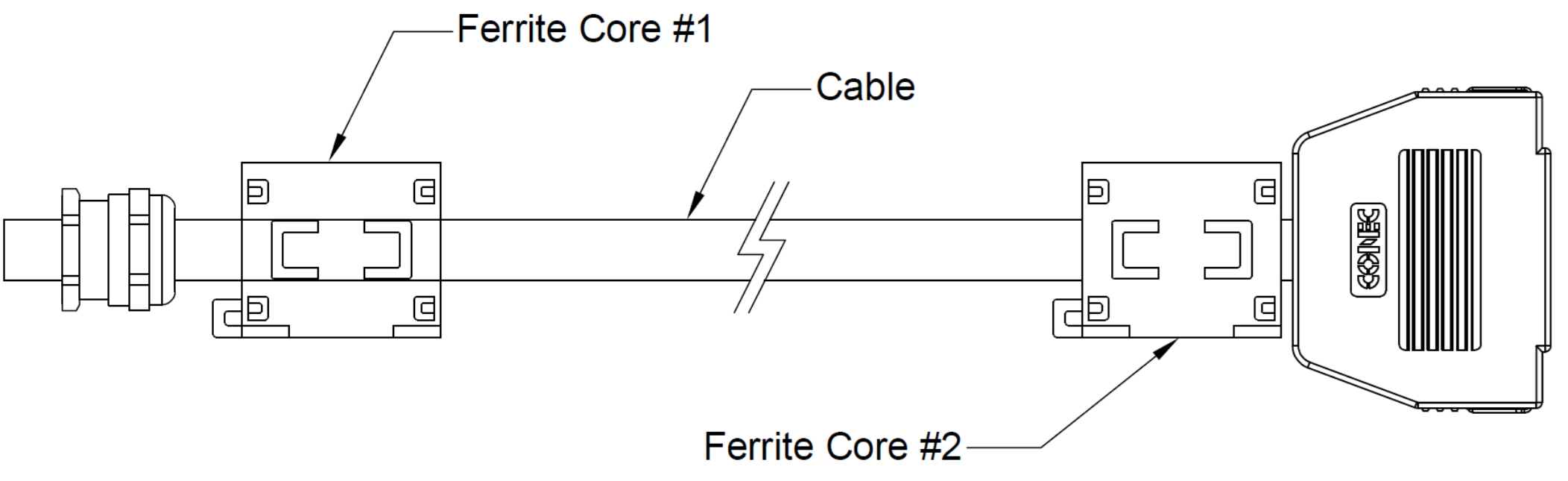
- Pokud je systém ovlivněn šumem generovaným elektromagnetickými vlnami, doporučuje se pro zajištění normálního provozu instalovat na propojovací části kabelu učícího ovladače feritová jádra. Umístění instalace jsou následující:
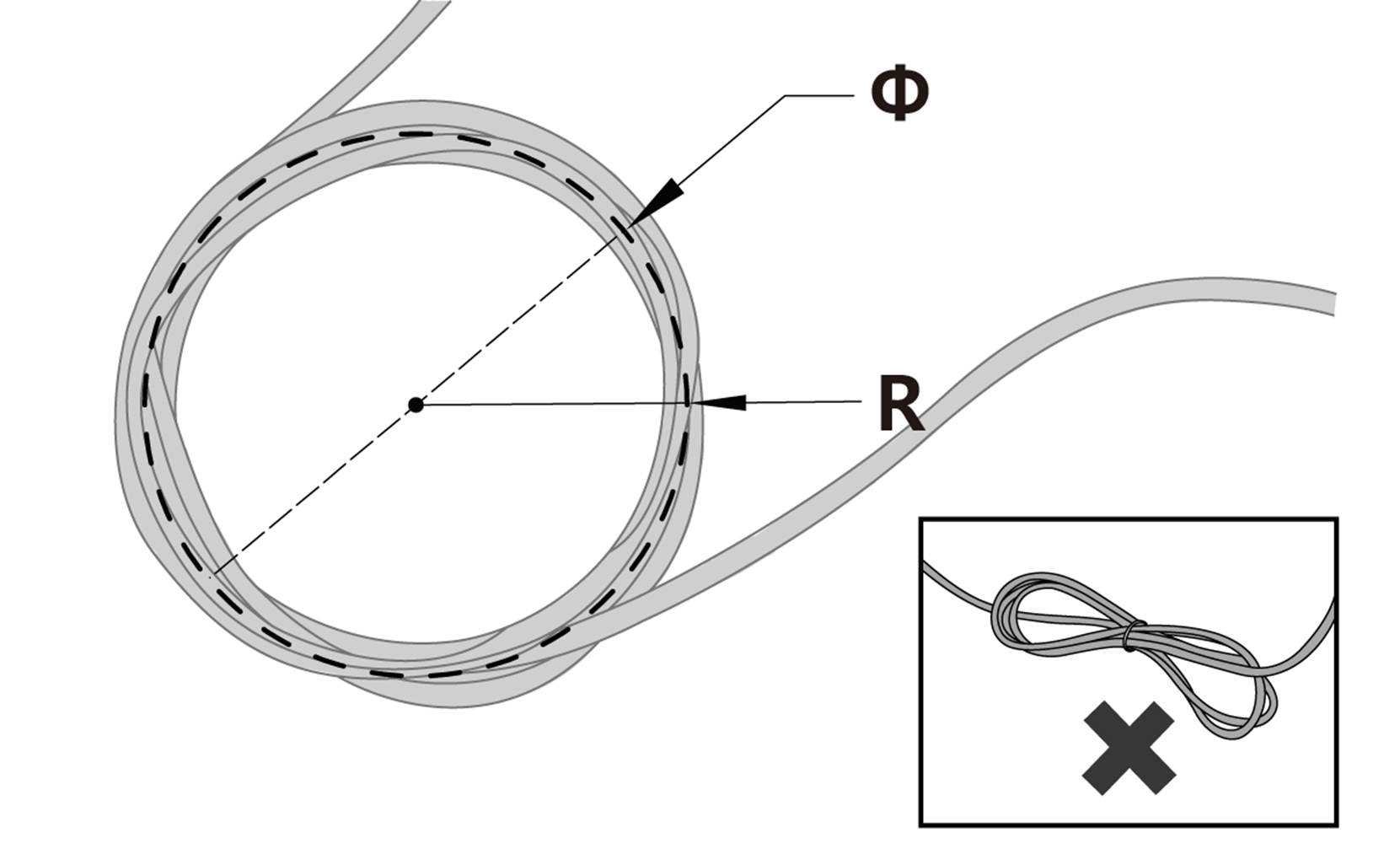
Uspořádání kabelů
Dbejte na to, aby zahnutí kabelů bylo při vedení kabelů větší než minimální poloměr ohnutí. Minimální poloměr ohnutí každého kabelu je následující:
Kabel | Minimální poloměr zahnutí (R) |
Teach Pendant cable | 120 mm |
Manipulator cables | 120 mm |
Smart Pendant cable | 100 mm |
Emergency stop button cable | 100 mm |
Upozornění
- Zajistěte, aby každá propojovací část učícího ovladače měla větší než minimální poloměr zakřivení (120 mm).
- Pokud je poloměr ohnutí menší než minimální poloměr ohnutí (120 mm), může dojít k odpojení kabelu nebo poškození produktu.
- V prostředích vystavených šumu generovanému elektromagnetickými vlnami nainstalujte vhodné kabely a proveďte další opatření, aby nedošlo k poruše.
Připojení řídicí jednotky k napájení
Zasuňte napájecí kabel do příslušného konektoru řídicí jednotky, dokud neuslyšíte cvaknutí. Díky tomu se kabel neuvolní.
Varování
- Po připojení napájecího kabelu se ujistěte, že robot je správně uzemněný (elektrický zemnicí vodič). Pro všechna zařízení v systému vytvořte společné uzemnění pomocí nevyužitého šroubu označeného uvnitř řídicí jednotky symbolem uzemnění. Zemnicí vodič musí snést maximální proud systému.
- Napájecí vstup řídicí jednotky chraňte pomocí prvků, jako jsou jističe.
- Kabel manipulátoru neupravujte ani neprodlužujte. To může způsobit požár nebo poruchu řídicí jednotky.
- Ujistěte se, že všechny kabely jsou správně připojeny, a teprve poté řídicí jednotku zapněte. Vždy používejte originální kabel, který se dodává spolu s výrobkem.
- Dávejte pozor, abyste nepřipojili nesprávně polaritu vstupního napětí.
Poznámka
- Při konfiguraci systému se doporučuje nainstalovat vypínač, který dokáže vypnout napájení všech zařízení v systému najednou.
- Pokud je použita řídicí jednotka pro ss napájení, může být pohyb robota omezen podle zatížení a pohybu.
- Pokud je vstupní napětí 48 V nebo nižší, pohyb robota může být omezen v závislosti na zatížení a pohybu.
- Napájení musí splňovat minimální požadavky, jako je zemnění a jističe. Technické parametry elektroinstalace jsou následující:
Parametr | Technické parametry |
Input Voltage | 22–60 V ss |
Rated Input Current | 30 A |