
Provedení pode základny robota
Chcete-li robota posunout podle jeho základny, postupujte podle následujících kroků:
Na obrazovce Pojíždění vyberte kartu Úloha.
Vyberte zobrazovací souřadnice, které se použijí jako základna, a jako referenční bod souřadnic úlohy vyberte možnost Základnové.
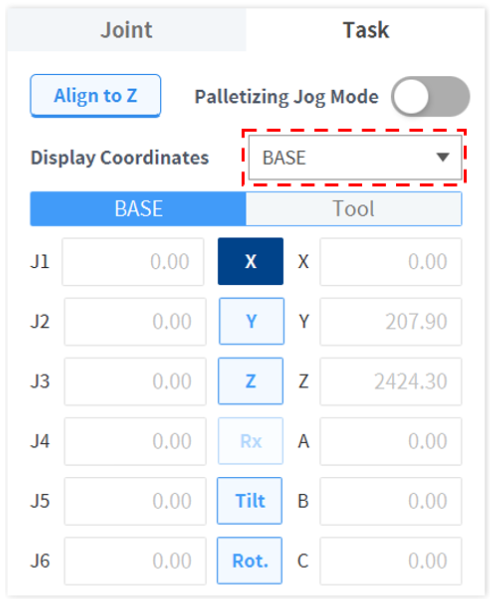
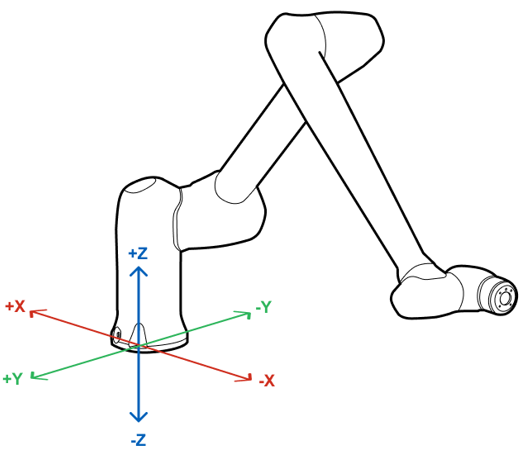
Pro pohyb vyberte Základnové souřadnice.(Rx je neaktivní pro modely řady P)
Stiskněte a podržte Směrové tlačítko(


Poznámka
Ve virtuálním režimu není použita bezpečnostní oblast.