Rozumět dodržování předpisů/silům
VOLITELNÉ TVRDĚ 20 MIN
Řízení síly a řízení souladu jsou funkce ovládající sílu robota. Tyto funkce také řídí provádění pohybu a ovládání síly, pokud je přidán příkaz pohybu. Kontrola shody a kontrola síly mají následující rozdíly:
- Kontrola dodržování předpisů
- Robot při kontrole shody odpovídá vnější síle na konci TCP robota a po odstranění vnější síly se vytvoří síla, která vrátí robota do původní polohy, což způsobí, že se robot přesune do odpovídající polohy.
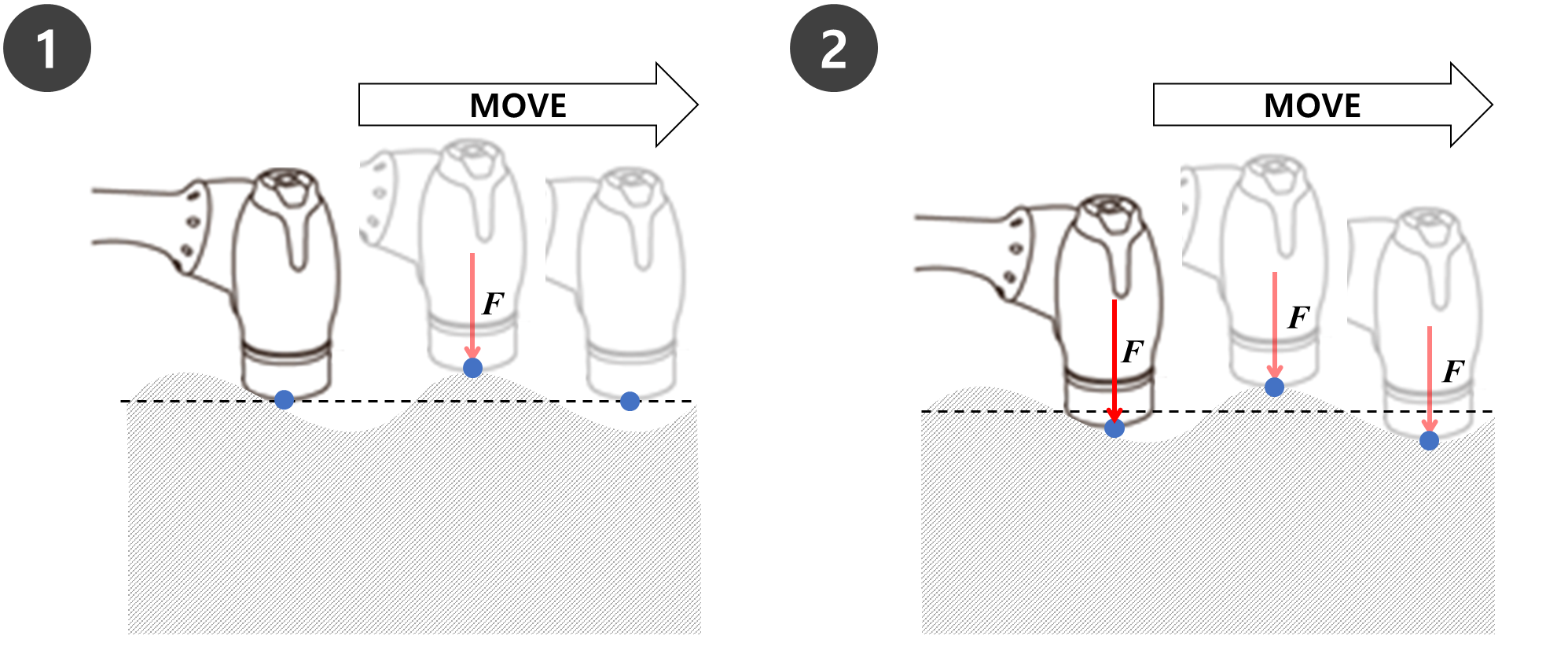
- Lze jej použít, pokud je vyžadován lineární pohyb na nerovném povrchu bez poškození robota a povrchu. Lze jej použít k prevenci neočekávaných kolizí kolem obráběného dílce.
- Řízení síly
- Při řízení síly je síla generována na konci TCP robota. Zrychlení je generováno ve směru, ve které je síla generována, takže robot se pohybuje směrem ke směru pohybu a zároveň směrem síly.
- Při kontaktu s předmětem bude na objekt aplikována síla, dokud nebude nastavená síla a odpuzující síla objektu tvořit rovnováhu.
- Lze ji použít, pokud je třeba použít stejnou sílu na lineární pohyb na nerovném povrchu. Může být použit v úkolech, které vyžadují konstantní sílu při pohybu, jako je leštění.
Poznámka
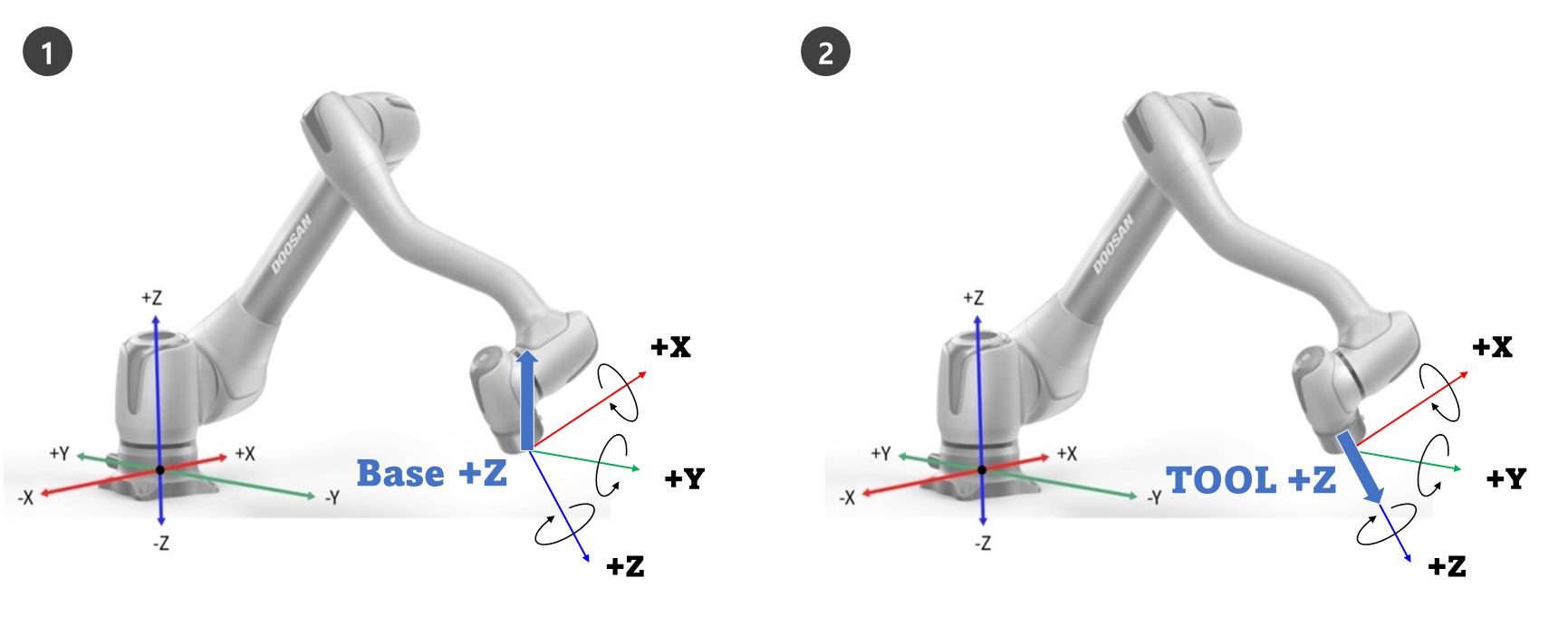
Příkazy compliance a Force se provádějí na základě aktuálních souřadnic. Výchozí souřadnice úlohy jsou souřadnice základny a souřadnice lze změnit příkazem Set.
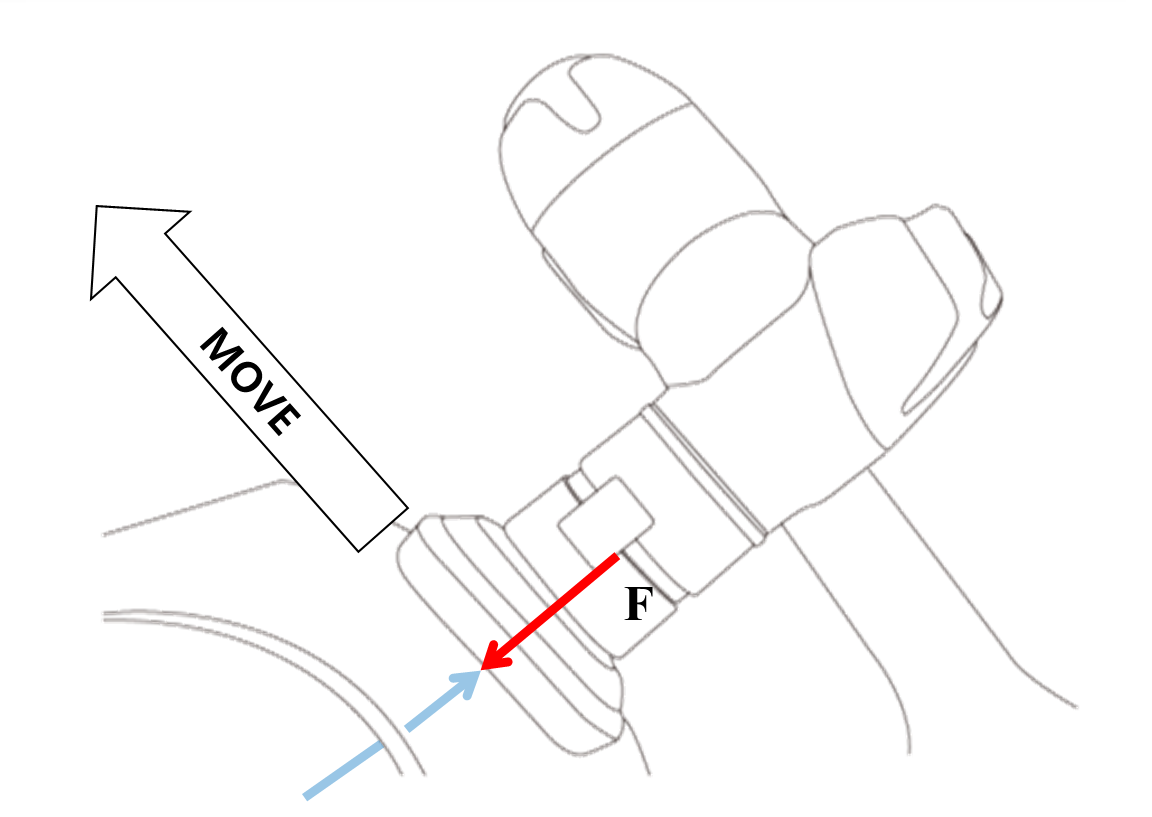
- Obr. 1 je provozní směr, pokud je na základní souřadnice použita regulace síly/shody ve směru +Z.
- Obr. 2 je směr provozu, když je na souřadnice nástroje použita regulace síly/shody ve směru +Z.
Kontrola dodržování předpisů

Kontrola konformity je funkce, která odpovídá vnější síle podle nastavené tuhosti při působení síly na konec TCP robota. Vyrovnává síly v cílovém bodě a jedná se o kontrolní metodu, která generuje odpuzující sílu, pokud dojde k posunutí mimo vyvažovací bod. Během kontroly shody se konec robota pohybuje jako pružina.
- Pokud dojde ke kolizi, když je řízení pohybu používáno samostatně, je možné, že by se mohl poškozený předmět poškodit.
- Roboti Doosan Robotics se bezpečně zastaví, když dojde ke kolizi, ale v závislosti na nastavení uživatele, jakojsou bezpečnostní limity > Citlivost kolize, mohou nastat následující situace.
- Pokud je při řízení pohybu nastaveno řízení shody na hodnotu Zapnuto, robot se bude pohybovat a zároveň bude dodržovat kolizi s předmětem.
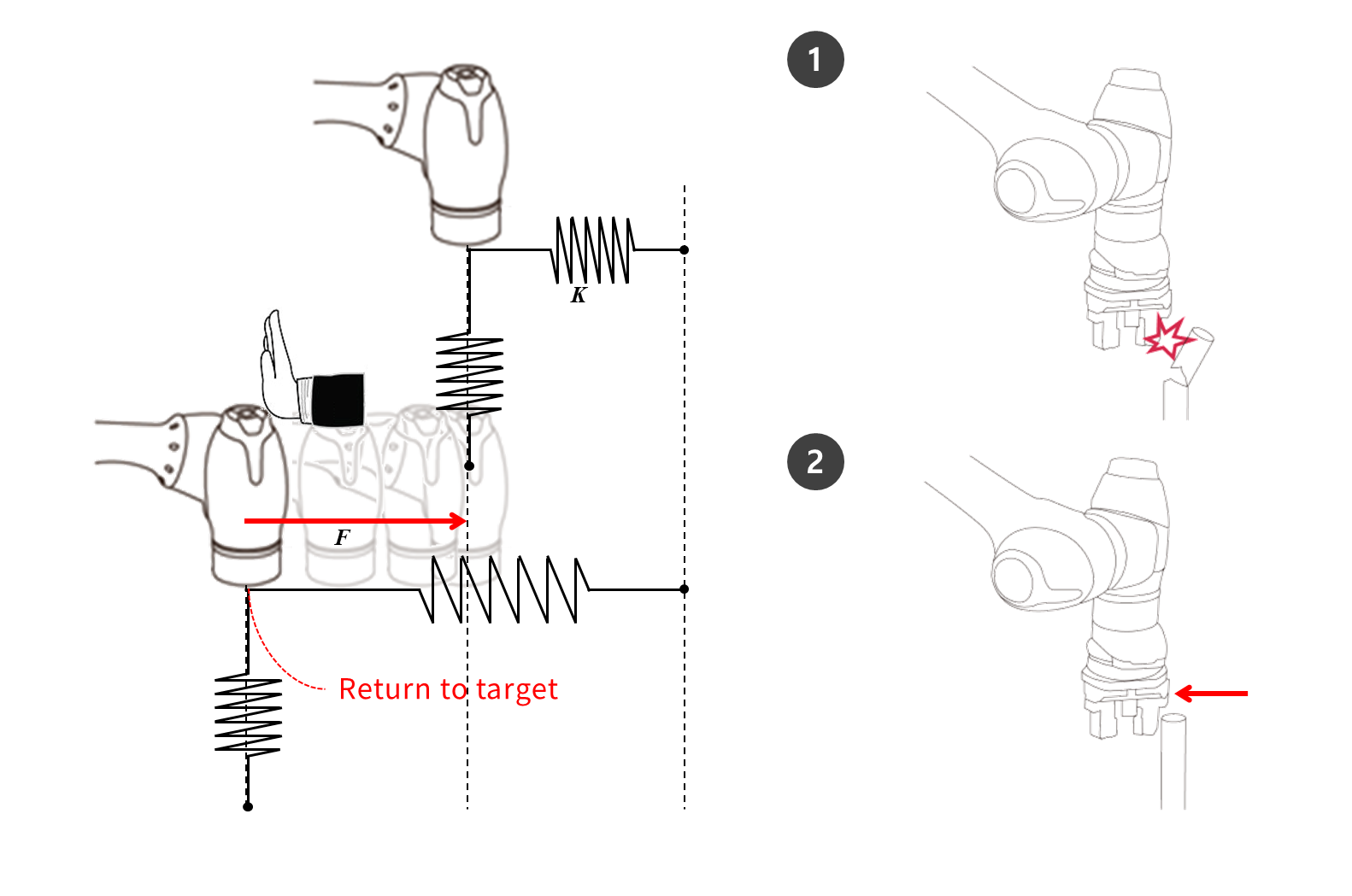
Pokud F je vnější síla, k je tuhost a X je vzdálenost, následující vzorce jsou pravdivé.
- F = K * X.
- K = F / X.
- X = F / K.
Pokud je na základě výše uvedených vzorců nastavena tuhost řízení kompliance na 1000N/m a pokud se robot pohybuje 1 mm, vygenerovaná vnější síla je 1N.
- F=1000 N/m*0.001 m=1 N (0.001 m=1 mm)
Poznámka
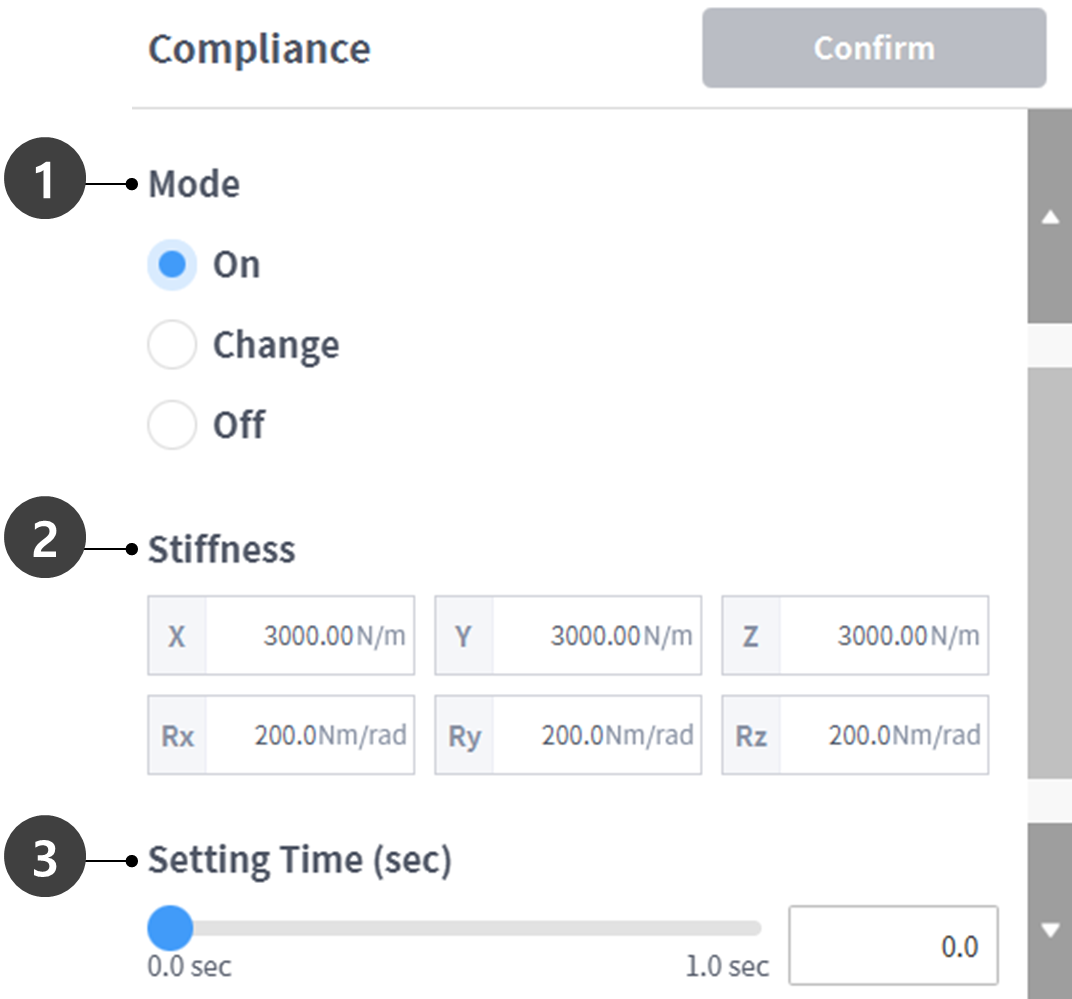
V příkazu vlastnost shody lze nastavit následující hodnoty:
- Režim
- Zapnuto: Umožňuje kontrolu konformity
- Změnit: Pokud je režim konformity nastaven na hodnotu Zapnuto, změní se na tuhost
- Vypnuto: Deaktivuje kontrolu konformity
- Rozsah tuhosti
- M/H Series : Translation(0~20000N/m), Rotation(0~1000Nm/rad)
- A Series : Translation(0~10000N/m), Rotation(0~300Nm/rad)
- Nižší hodnoty tuhosti reagují na vnější sílu jemněji a budou vyžadovat více času pro návrat do cílového bodu
- Nastavení času
- Je to doba potřebná k tomu, aby hodnota aktuální tuhosti dosáhla nastavené hodnoty tuhosti (0-1s).
Pozor
- Musí být přesně nastavena hmotnost nástroje a TCP (Tool Center Point). Nepřesná hmotnost nástroje může způsobit, že robot detekuje hmotnost nástroje jako vnější sílu, a nastavení příkazu shody na způsobí chybu polohy.
- Napětí sady šatů může způsobit vnější točivý moment robota. Proto při instalaci sady šatů buďte opatrní.
- Při provádění asynchronního pohybu nebo mixování nelze zapnout nebo vypnout shodu.
- Při zapnutí příkazu shody je povolen pouze lineární pohyb. Kloubní pohyby, jako jsou MoveJ a MoveSJ, nejsou povoleny.
- Při zapnutí příkazu Compliance Command nelze změnit hmotnost nástroje nebo TCP.
- Při zapnutí příkazu Compliance Command není možné přesně dosáhnout cílového bodu z důvodu dodržení točivého momentu generovaného během provádění pohybu. Proto se doporučuje zapnout kontrolu shody v blízkosti cílového bodu. Nebo lze minimalizovat chybu polohy nastavením vysoké hodnoty tuhosti.
Řízení síly

Řízení síly je funkce, která aplikuje sílu ve směru řízení síly, dokud nebude nastavená síla a odpuzující síla tvořit rovnováhu
- Pohybuje robotem ve směru nastavené síly, a pokud dojde ke kontaktu s předmětem, udržuje vloženou sílu (N)
- Je schopen ovládat pohyb ve směru odlišném od směru síly při použití konstantní síly
- Minimální nastavení je +/- 10N a lze jej doladit s rozlišením 0,2N
- Řízení síly není v zóně singularity dostupné
- Kontrola shody se obecně používá ve spojení s regulací síly, aby regulace síly vyhovovala vnější síle
Poznámka
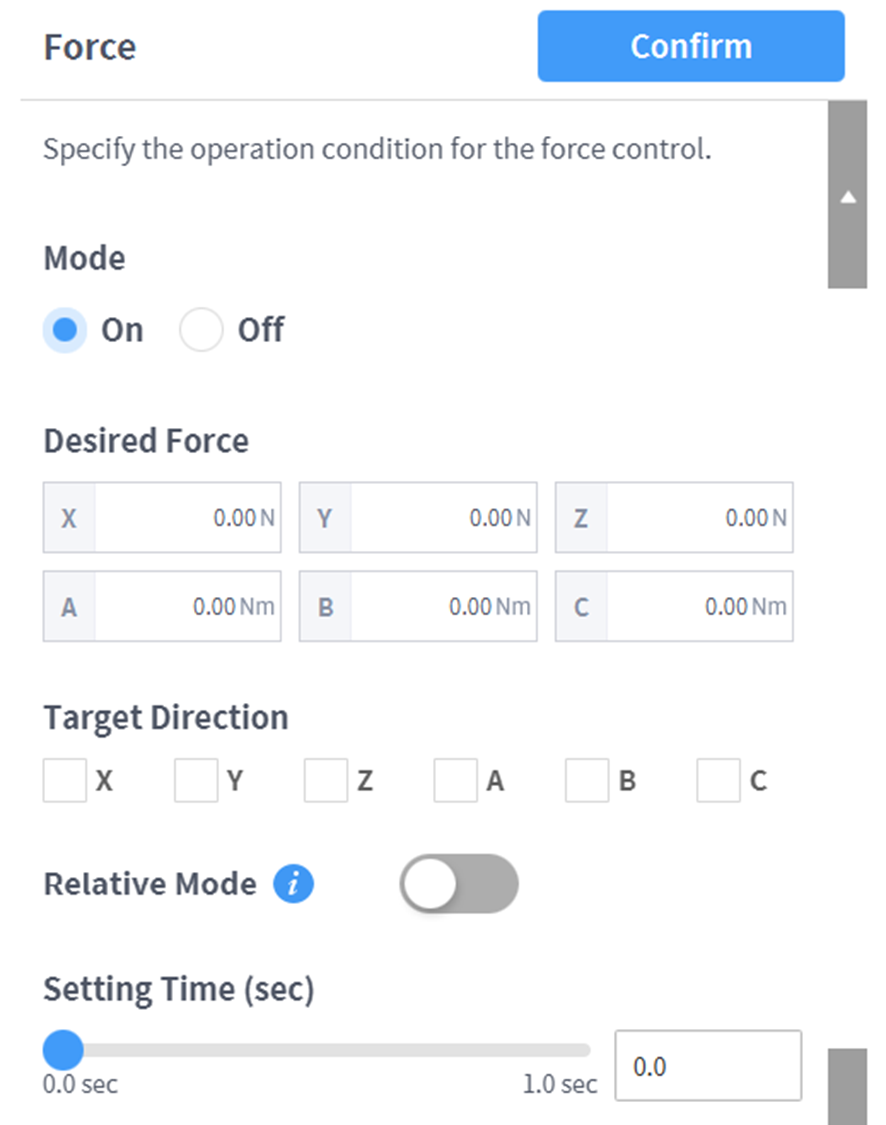
Z vlastnosti příkazu síla lze nastavit následující hodnoty.
- Režim
- Zapnuto: Aktivuje řízení síly
- Vypnuto: Deaktivuje řízení síly
- Požadovaný rozsah síly
- X, Y, Z: 10 - (maximum každého robota) N
- A, B, C: 5 - (maximum každého robota) Nm
- Další informace o maximální síle viz (2.11.0.1_temp-cs_CZ) Horní/dolní prahové hodnoty a výchozí hodnoty bezpečnostních parametrů.
- Směr cíle
- Přesune se na vybranou cílovou hodnotu každého směru.
- Lze provést více výběrů.
- Ovládání síly lze provádět pouze s nastavením směru po nastavení síly.
- Pokud jeden z více vybraných směrů dosáhne cílové síly, bude pokračovat v pohybu, dokud nebude dosaženo cílové hodnoty pro druhý směr.
- Relativní režim
- Pokud je tento režim aktivován, kalibruje vnější sílu působící na robota na 0, aby se zvýšila přesnost řízení síly.
- Když je relativní režim deaktivován, skutečná síla působící na cíl se rovná součtu nastavené síly a vnější síly.
- Když je aktivní relativní režim, skutečná síla působící na cíl je rovna nastavené síle.
- Během řízení síly může dojít k odchylce v závislosti na pozici nebo vnější síle.
- Při řízení síly není možné dosáhnout přesného cílového bodu. Proto se doporučuje povolit řízení síly v blízkosti cílového bodu.
- Pokud je tento režim aktivován, kalibruje vnější sílu působící na robota na 0, aby se zvýšila přesnost řízení síly.
- Nastavení času
- Je to doba potřebná k tomu, aby aktuální hodnota síly dosáhla nastavené hodnoty síly (0-1s).