
Nastavení instalační pozice robota
Robot může být instalován pod jakýmkoli úhlem. Chcete-li nastavit instalační pozici robota, klepněte na tlačítko 
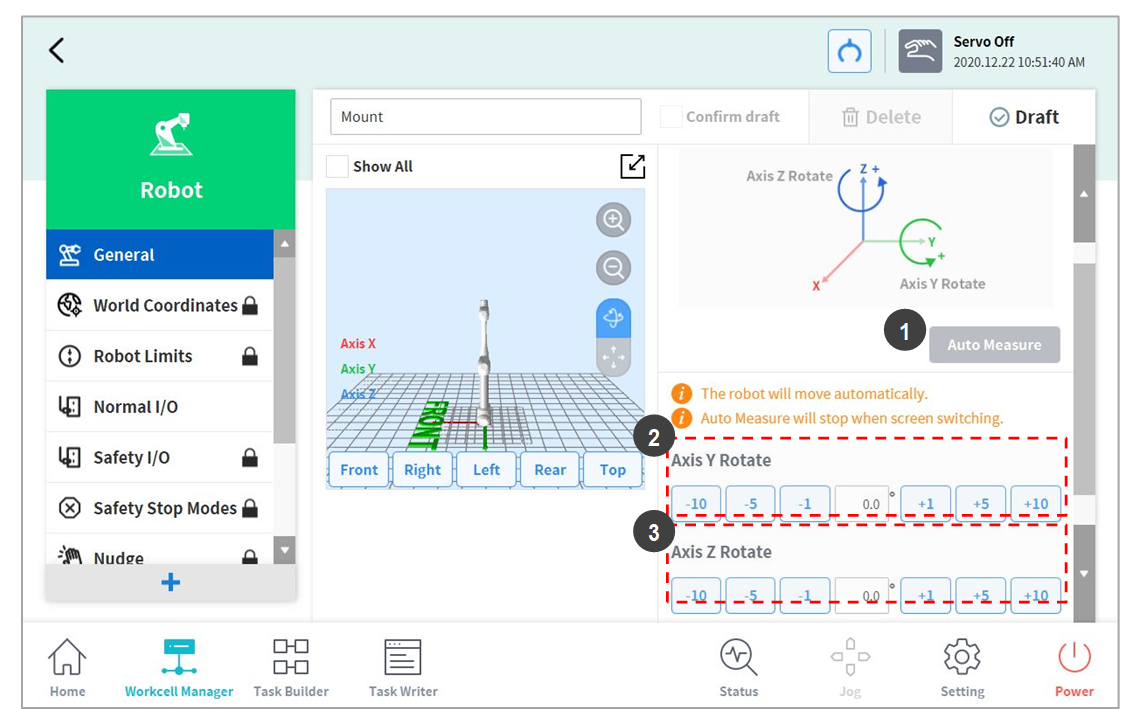
Č. | Položka | Popis |
|---|---|---|
1 | Auto Calculate | Vypočítá instalační úhel robota automaticky. |
2 | Y-axis Rotation Setting | Zadejte úhel osy Y robota během instalace. |
3 | Z-axis Rotation Setting | Zadejte úhel osy X robota během instalace. |
Poznámka
Klepnutím na tlačítko Automatický výpočet se hodnota náklonu vypočítá automaticky. Funkce Automatický výpočet instalační pozice se dá použít tehdy, když základna robota svírá s podlahou úhel větší než 5 stupňů. Funkce Automaticky vypočítat instalační pozici robota umožňuje snadnou konfiguraci instalační pozice vyžadovanou při přímém učení, funkci ovládání síly a ovládání shody bez zadání přesných hodnot instalačního úhlu. Nicméně přesnost absolutní polohy automaticky vypočítané pozice robota může být nižší než přesně naměřené hodnoty.
Varování
Modely řady H nepodporují funkce instalační pozice robota. Instalace se musí provést na podlahu.