
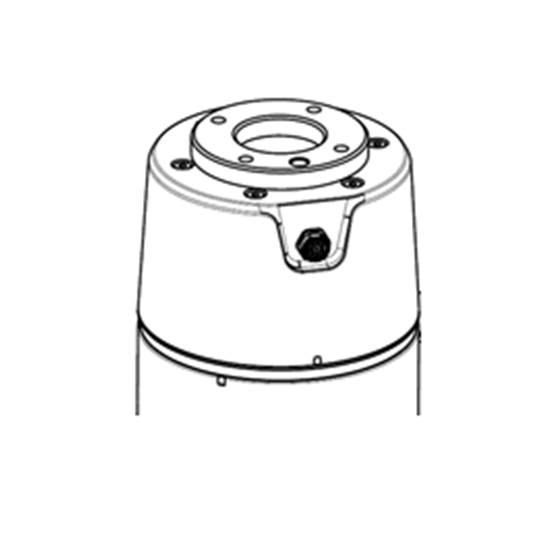
Příruba I/O
Kryt koncové příruby robota má jeden 8pinový konektor specifikace M8, jehož umístění a tvar viz obrázek níže.
Dva konektory zajišťují napájení a řízení signálů potřebných pro provoz uchopovače a snímačů zabudovaných ve specifických nástrojích robota. Níže jsou uvedeny příklady průmyslových kabelů (lze použít odpovídající kabely):
Phoenix contact 1404178, male (rovný)
Phoenix contact 1404182, male (pravoúhlý)
Schematický diagram
Mapa kolíků každého konektoru je následující:
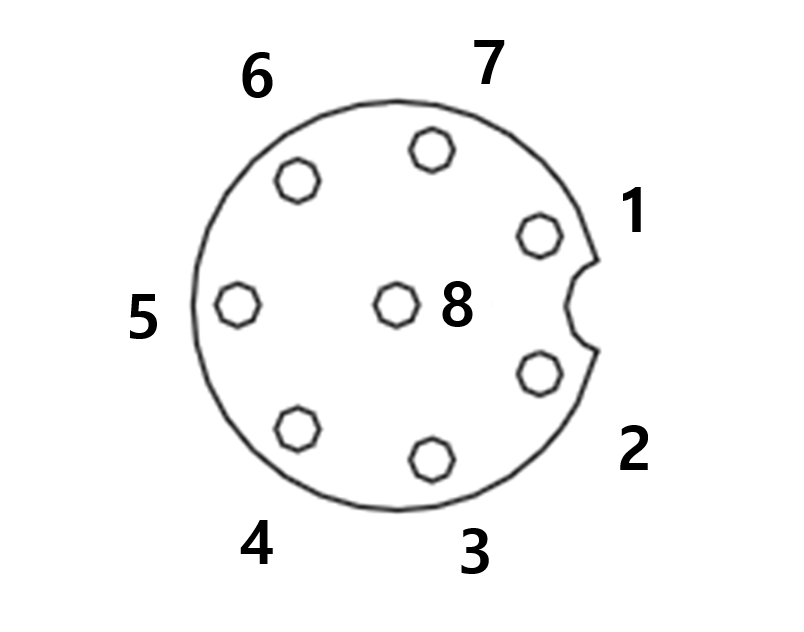
Podrobnou konfiguraci I/O pro konektor X1 naleznete v níže uvedené tabulce.
Od 04.11.2024 se to změnilo následovně.
Nastavení X1
No | Signal type | Description |
|---|---|---|
1 | Digital Input 1 | PNP (typ zdroje, výchozí) |
2 | Digital Output 1 | nastavte buď na PNP (Source Type, výchozí) nebo NPN (Sink Type) |
3 | Digital Output 2 | nastavte buď na PNP (Source Type, výchozí) nebo NPN (Sink Type) |
4 | Analog Input 1 / RS-485 + | nastavte buď na Napětí (0-10V) nebo Proud (4-20mA, výchozí) / Maximální přenosová rychlost 1M |
5 | Power | Nastavte vnitřní napájení na +24V (výchozí), +12V nebo 0V |
6 | Analog Input 2 / RS-485 - | nastavte buď na Napětí (0-10V) nebo Proud (4-20mA, výchozí) / Maximální přenosová rychlost 1M |
7 | Digital Input 2 | PNP (typ zdroje, výchozí) |
8 | GND |
Počáteční napájení přírubového vstupu/výstupu (I/O) je nastaveno na 0 V a lze jej nastavit na 12 V nebo 24 V.
Podrobné specifikace napájení během připojení I/O naleznete v tabulce níže.
Parameter | Min | Type | Max | Unit |
|---|---|---|---|---|
Supply voltage (12V mode) | 11.4 | 12 | 12.6 | V |
Supply voltage (24V mode) | 22.8 | 24 | 25.2 | V |
Supply current | - | - | 1.5 | A |
ㅤ
Konfigurace I/O před 04.11.2024 jsou následující.
Nastavení X1 (Digitální I/O, RS 485)
Ne | Signal type | Description |
1 | Digital Input 1 | PNP (typ zdroje, výchozí) |
2 | Digital Output 1 | nastavte buď na PNP (Source Type, výchozí) nebo NPN (Sink Type) |
3 | Digital Output 2 | nastavte buď na PNP (Source Type, výchozí) nebo NPN (Sink Type) |
4 | RS485 A | Maximální přenosová rychlost 1M |
5 | Power | +24V |
6 | RS485 B | Maximální přenosová rychlost 1M |
7 | Digital Input 2 | PNP (typ zdroje, výchozí) |
8 | GND |
Pozor
Nakonfigurujte nástroje a chapadla po kontrole konfigurace vstupu/výstupu na základě data výroby (datum výroby na štítku robota).
Vše potřebné naleznete na stránkách Doosan Robotlab. (https://robotlab.doosanrobotics.com)
Pokud spustíte robotické nástroje ignorující konfiguraci vstupu/výstupu, může dojít k trvalému poškození výrobku.
Interní napájení přírubových I/O je nastaveno na 24 V a podrobné specifikace napájení během připojení I/O naleznete v tabulce níže.
Parametr | Min | Type | Max | Jednotka |
Supply voltage | - | 24 | - | V |
Supply current | - | 2 | 3 | A |
Digital output | - | 2 | - | EA |
Digital input | - | 2 | - | EA |
Varování
Nástroj a uchopovač nastavte tak, aby při vypnutí napájení nehrozilo žádné nebezpečí.
(Např. pád obrobku z nástroje)Svorka č. 5 každého konektoru vždy dává napětí 24 V, zatímco je robot napájen, a proto když nastavujete nástroj a uchopovač, vždy vypněte napájení robota.