
Tlačítko kokpit (pět tlačítek)
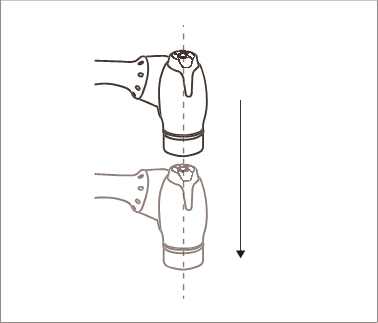
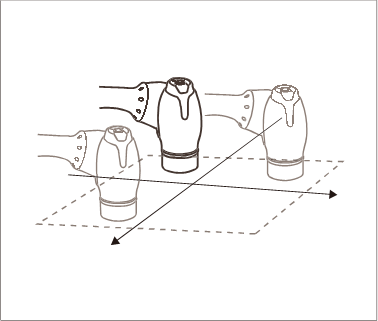
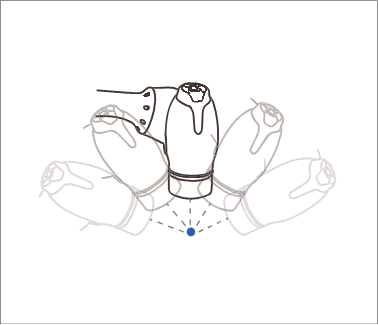
Uživatel může změnit pozici robota, zatímco drží stisknuté tlačítko Ručního navádění nebo nastavitelné tlačítko na kokpitu.
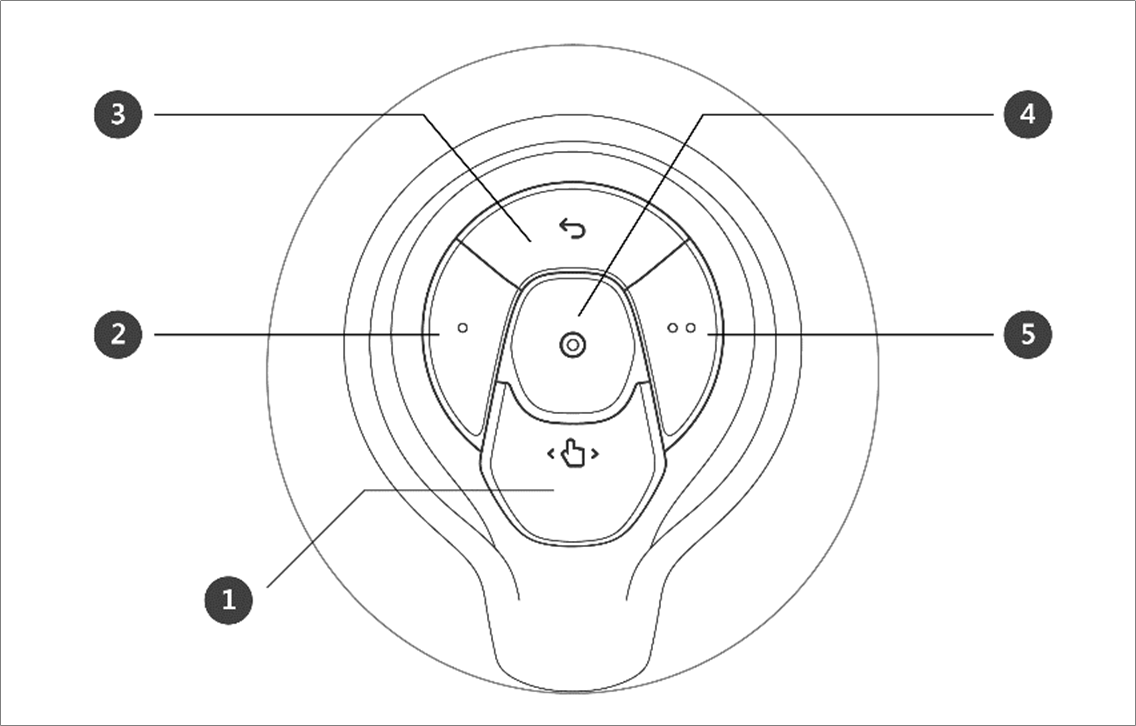
No. | Položka | Popis |
|---|---|---|
1 | Hand-Guiding Button | Toto tlačítko se dá použít k nastavení nebo změně pozice robota. |
2,5 | Tlačítko uživatelského nastavení (omezený pohyb) | Tímto tlačítkem lze upravit pozici robota jejím zadáním podle stavu zámku odpovídajícího danému režimu.
 Více informací o nastaveních najdete v části „Nastavení kokpitu “. |
3 | Cancel Button | Vymaže poslední uloženou pozici. |
4 | Save Pose Button | Uloží poslední pozici robota. Další informace najdete v části „Nastavení pracovního bodu dovednostního příkazu pomocí kokpitových tlačítek“. |
Upozornění
Modely řady A bez FTS (A0509, A0912) nemohou používat tlačítko uživatelského nastavení (omezený pohyb).
Modely řady A s FTS (A0509S, A0912S) mohou používat tlačítko uživatelského nastavení (omezený pohyb).
Pevný pohyb závisí na FTS připevněném k hrotu robota; proto je nezbytné, aby byl nástroj připevněn a robot jej při pohybu uchopil. Pohyb s robotem při držení těla nemusí vyvolat reakci ze strany robota.
Podrobnosti o funkčních limitech jednotlivých řad robotů naleznete v části Funkční limity každé řady robotů.