
Názvy a funkce
Manipulátor
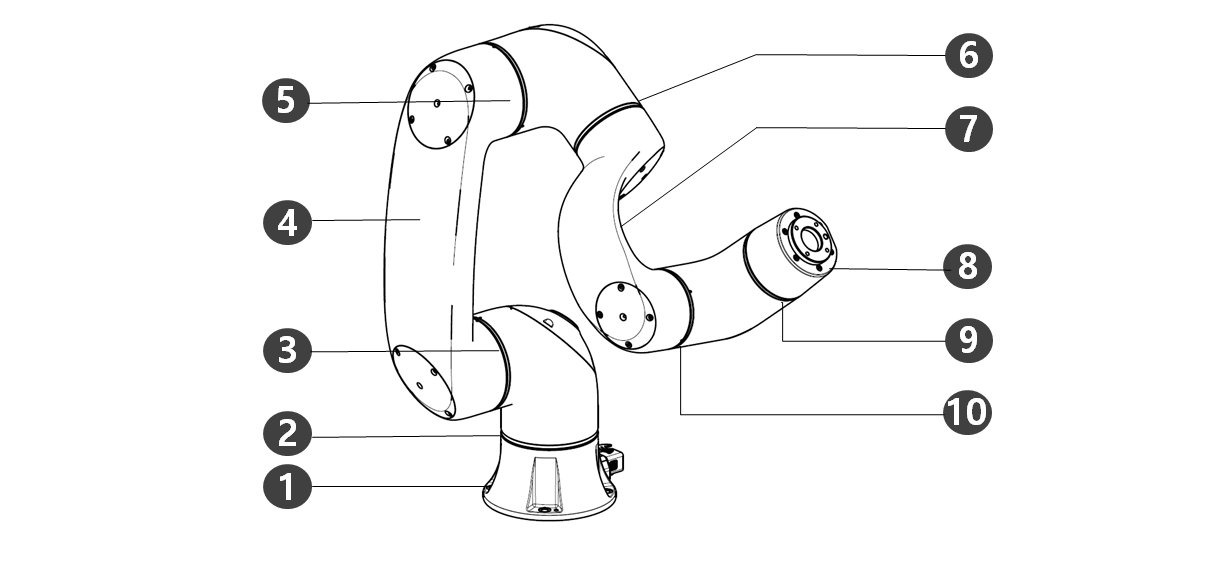
Názvy součástí
Č. | Název | Č. | Název |
|---|---|---|---|
1 | Base | 6 | J4 |
2 | J1 | 7 | Link2 |
3 | J2 | 8 | Tool Flange |
4 | Link1 | 9 | J5 |
5 | J3 | 10 | J6 |
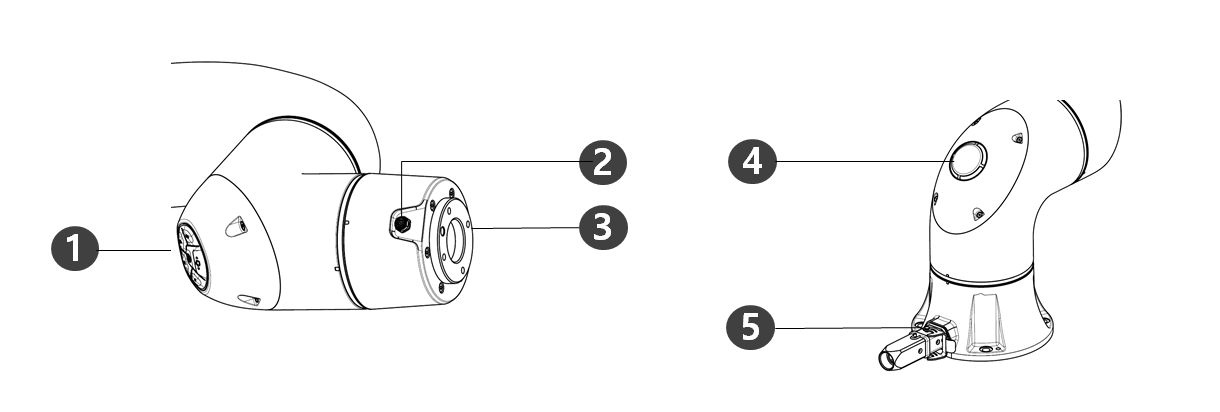
Klíčové funkce
Č. | Položka | Popis |
|---|---|---|
1 | Cockpit | [Volba] Řadič použitý pro přímé učení a provoz. |
| 2 | Flange I/O | I/O port pro ovládání nástroje. (Digitální vstup 2ch, výstup 2ch) |
3 | Tool flange | Oblast pro instalaci nástrojů. |
4 | LED (1-axis) | Zobrazuje stav robota pomocí různých barev. Další informace o stavu robota najdete v části „ (2.12-cs_CZ) Barva stavové a přírubové kontrolky pro každý režim“ |
5 | Connector | Používá se pro napájení a komunikaci robota. |
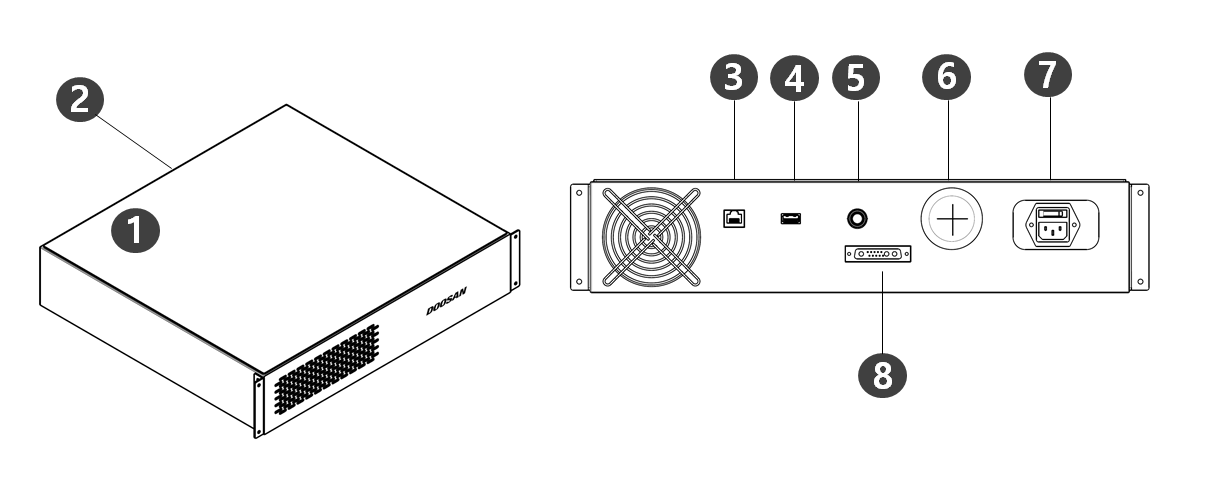
Ovladač
Č. | Položka | Popis |
1 | I/O connection terminal (internal) | Propojení s řídicími jednotkami dalších robotů nebo okolních zařízení není možné. |
2 | Emergency stop button and Smart Pendant connection terminal | Tímto se k řídicí jednotce připojí tlačítko nouzového zastavení nebo kabel chytrého ovladače. |
3 | Network connection terminal | Notebooky, zařízení TCP/IP, zařízení Modbus a vizuální snímače lze připojit ke svorce síťového konektoru v ovladač jednotce. |
4 | USB connection terminal | Protokoly generované během provozu robota lze uložit na paměťové zařízení USB nebo úlohy exportovat či importovat. |
5 | Emergency stop button and Smart Pendant connection terminal | Tímto se k řídicí jednotce připojí tlačítko nouzového zastavení nebo kabel chytrého ovladače. |
6 | External cable terminal | Terminál, který může připojit externí zařízení. |
7 | Power connection terminal | Tímto se napájení připojí k řídicí jednotce. |
| Manipulator cable connection terminal | Tímto se kabel manipulátoru připojí křídicí jednotce. |
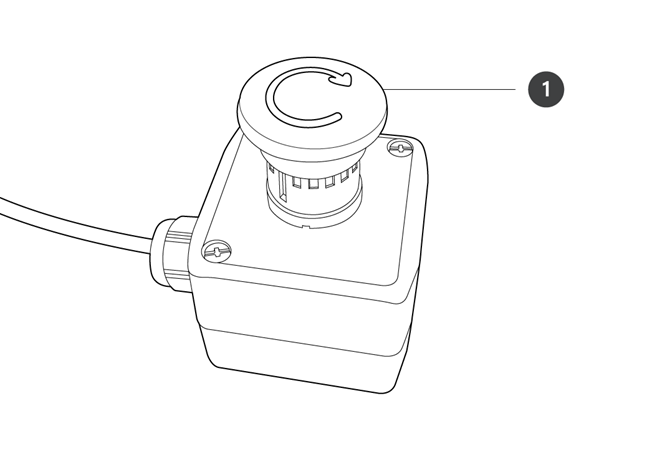
Vypínačů pro nouzové zastavení
Č. | Položka | Popis |
|---|---|---|
1 | Emergency Stop Button | V případě nouzové situace stiskněte tlačítko, čímž provoz robota zastavíte. |
Smart Pendant
※ Chytrého ovladač není standardem, jde o volitelnou položku, takže musí být zakoupen samostatně
Podrobnosti o vlastnostech produktu viz (2.12-cs_CZ) Příloha. Chytrého Ovladače (A Series).
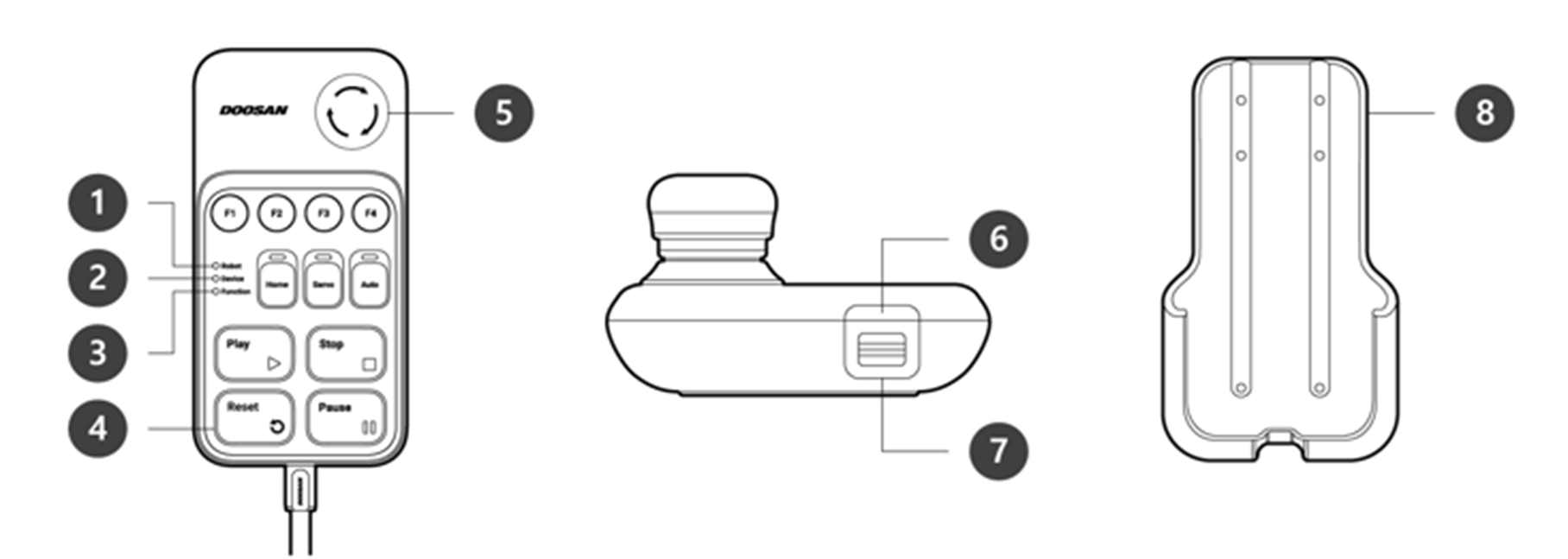
| Č. | Položka | Popis |
|---|---|---|
1 | Robot LED | Používá se k signalizaci stavu robota tak, že ukazuje uživateli stejnou barvu jako stavová LED kontrolka robota. |
2 | Device LED | Používá se k signalizaci aktivního režimu chytrého ovladače systému. |
3 | Function LED | Stisknutím čtyř tlačítek vstupního signálu (F1-F4) se rozsvítí LED kontrolka, která signalizuje stav stisknutí. |
4 | Buttons | Je k dispozici celkem 11 tlačítek, včetně čtyř tlačítek vstupního signálu (F1-F4) pro každou funkci, dále tlačítek Domů, Servo, Auto, Přehrát, Stop, Obnovit a Přerušit. |
5 | Emergency Stop Button | V případě nouzové situace stiskněte tlačítko, čímž provoz robota zastavíte. |
6 | Power Button | Používá se k zapnutí a vypnutí napájení chytrého ovladače. |
7 | Strap Anchor | Používá se k přidání popruhu na zařízení. |
8 | Holder bracket | Namontujte úchyt držáku na stěnu pro upevnění chytrého ovladače. |
Poznámka
- Chcete-li používat SW V2.8 nebo vyšší, připojte štítek Reset k tlačítku Pokračovat na chytrém přívěsku.
- Pokud používáte verzi nižší než SW V2.8, štítek resetování není třeba připevňovat. V této verzi funguje tlačítko obnovení v chytrém přívěsku jako funkce obnovení, nikoli funkce resetování.
- Štítek se může během používání odlepit, buďte proto opatrní.