
Funkce zásahu operátora
Pokud dojde k problému během provozu robota nebo uživatel vydá příkaz, robot přestane pracovat a zobrazí vyskakovací zprávu, která operátorovi umožní zasáhnout a situaci vyřešit. Poté, co uživatel problém vyřeší, úloha pokračuje na řádku programu, kde k problému došlo.
Poznámka
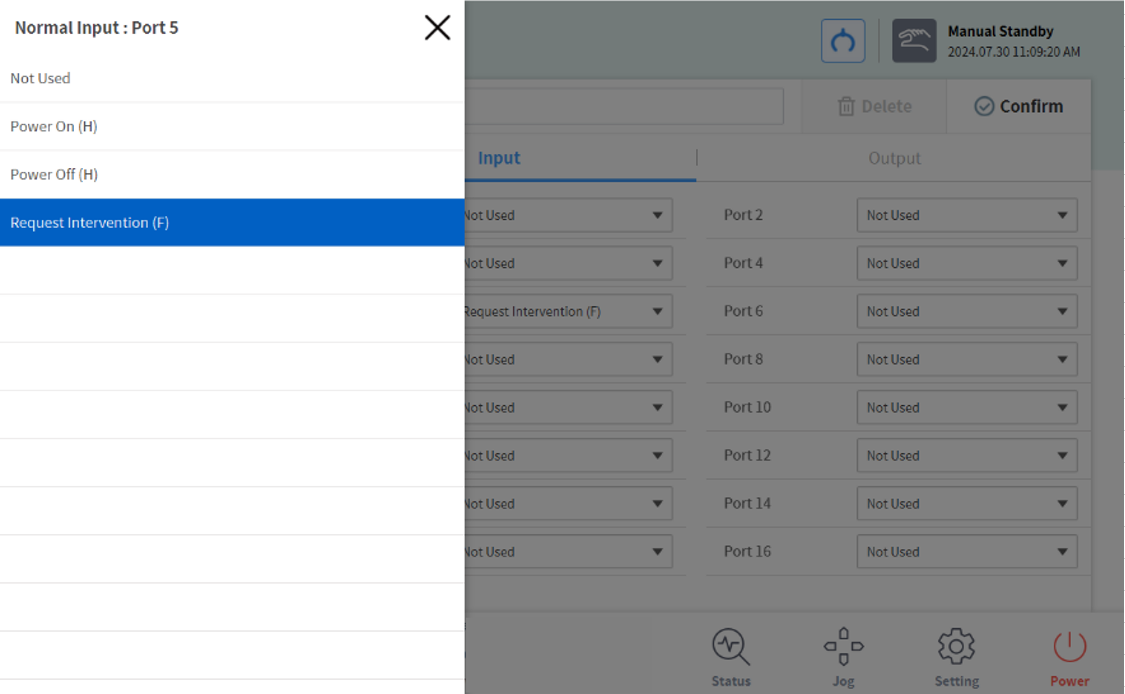
Chcete-li použít funkci zásahu pracovníka, musíte provést jedno z níže uvedených nastavení.
Workcell Manager - Normal I/O - Input - Request Intervention (F)
Workcell Manager - Peripheral - Ananlog Welding Machine - Welding Input Signal
(Podrobné nastavení naleznete v Welding Techinical Note.)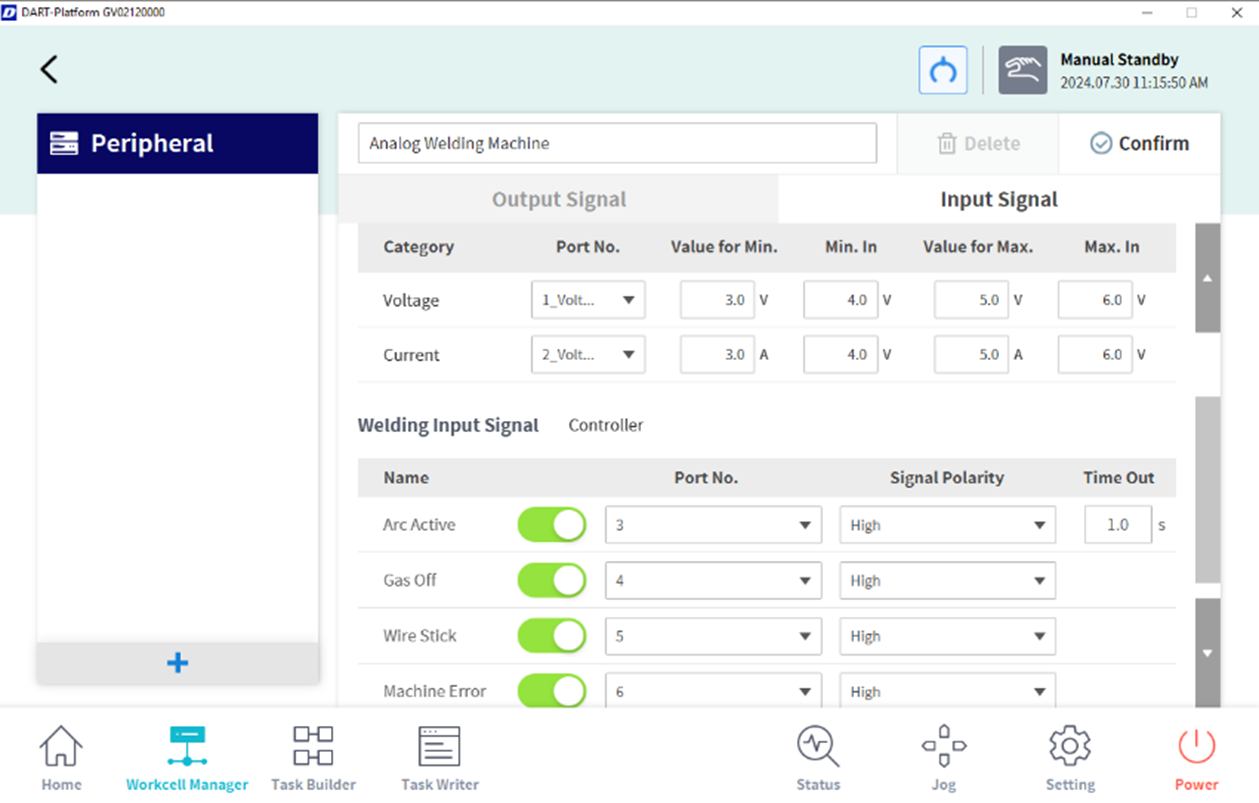
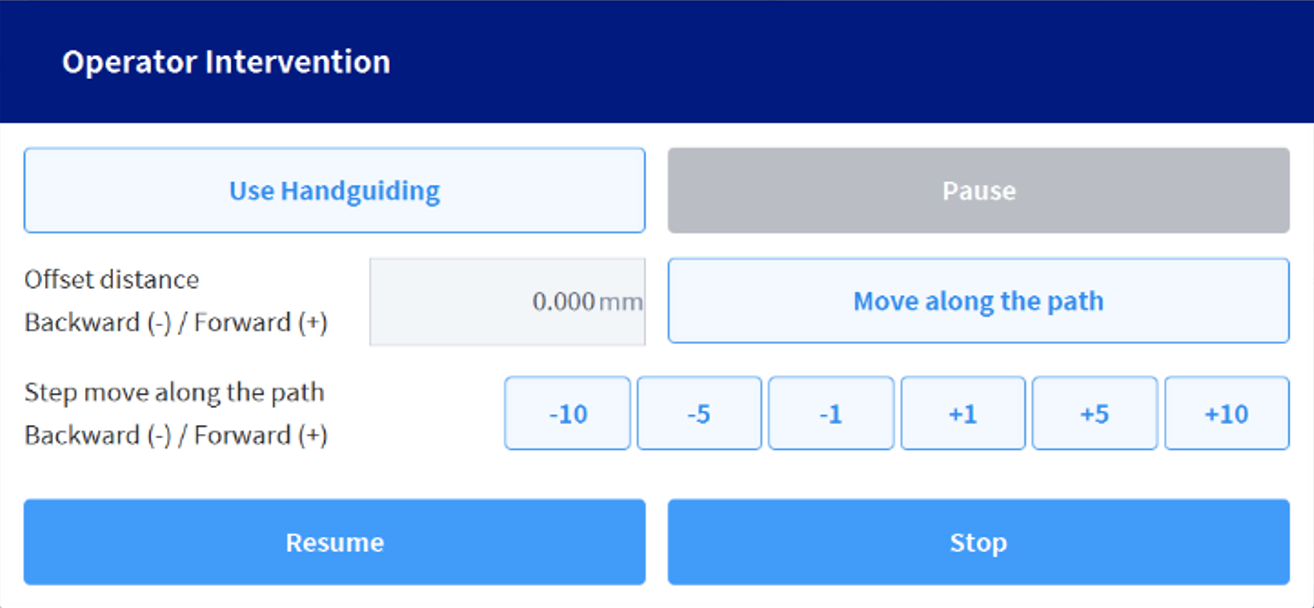
Tlačítka „Posunout po cestě“ a „Tlačítko Posun (-10,-5,-1,+1,+5,+10)“ provádějí stejnou akci. První se však pohybuje dopředu nebo dozadu z referenční polohy ručně zadaným Offsetem, zatímco druhý cílí bod dopředu nebo dozadu o přednastavený krok Offset. Po dokončení akce pomocí výše uvedených tlačítek se stisknutím dalšího tlačítka posune aktuální pozice o Offset.
Tlačítko „Use Handguiding button“ se aktivuje pouze tehdy, když je nastavena Collaborative Zone a stav robota se změní na stav Handguiding, který umožňuje přímou výuku v rámci zóny. Poté můžete přímou výuku aktivovat stisknutím tlačítka na zadní straně kokpitu nebo přívěsku Výuka.
V režimu navádění rukou se „Použít tlačítko navádění rukou“ změní na „Tlačítko ukončit navádění rukou“.
Když stisknete tlačítko „Ukončit ruční navádění“, stav ručního navádění se ukončí. V tuto chvíli se z bezpečnostních důvodů porovnává aktuální poloha robota, úhel a hodnoty bodu zastavení (čas, kdy se objeví první vyskakovací okno), aby se vytvořilo vyskakovací okno. Pokud se objeví vyskakovací okno s následujícím obsahem, musíte se znovu naučit přímo opravit polohu a držení robota a zkusit to znovu.
Pokud se přímá vzdálenost mezi aktuální polohou TCP a TCP v koncové poloze liší o více než 20 cm
Pokud se rozdíl mezi aktuálním úhlem spoje a úhlem spoje v bodě zastavení liší o více než 1~3 osy (10 stupňů) / 4~5 os (30 stupňů) / 6 os (60 stupňů)
Tato funkce je podporována pouze během operací MoveL / MoveC / MoveB.
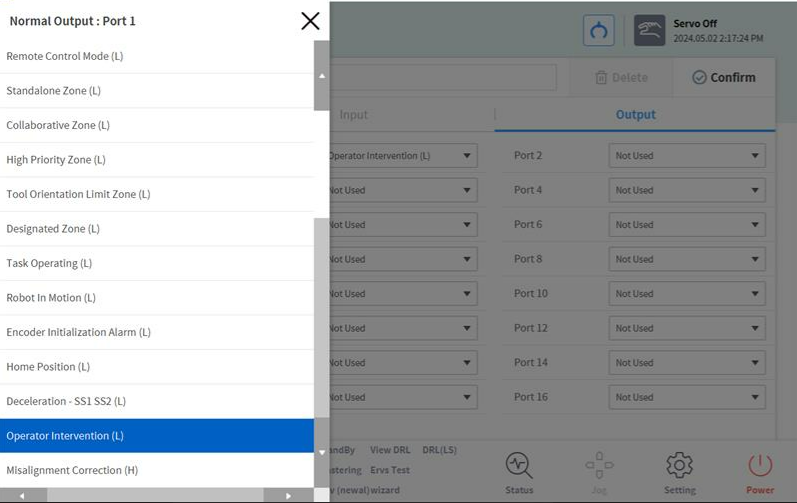
K signalizaci, že se objevilo vyskakovací okno, můžete použít funkci Normální výstup. Signál zůstane aktivní, když se objeví vyskakovací okno, a bude deaktivován, když vyskakovací okno skončí.
Workcell Manager - Normal I/O - Output - Operator Intervention (L)
Zde je scénář použití:
Přijímat digitální vstupní signál od uživatele nebo připojeného zařízení, zatímco program běží.
Robot se zastaví a objeví se vyskakovací okno pro zásah operátora.
(Pokud používáte přímou výuku) Stisknutím tlačítka Použít navádění rukou a poté stisknutím tlačítka na zadní straně kokpitu nebo výukového přívěsku aktivujte přímou výuku. Po dokončení operace přímého učení stiskněte tlačítko End Handguiding.
Stisknutím tlačítka Pohyb po cestě přesunete robota po cestě.
Po požadovaném pohybu robota stiskněte tlačítko Pokračovat pro obnovení úlohy robota a zavřete vyskakovací okno.