
Příruba I/O
Koncový kryt příruby robota má dva speciální 8kolíkové konektory M8, přičemž jejich umístění a tvar je vidět na obrázku níže.
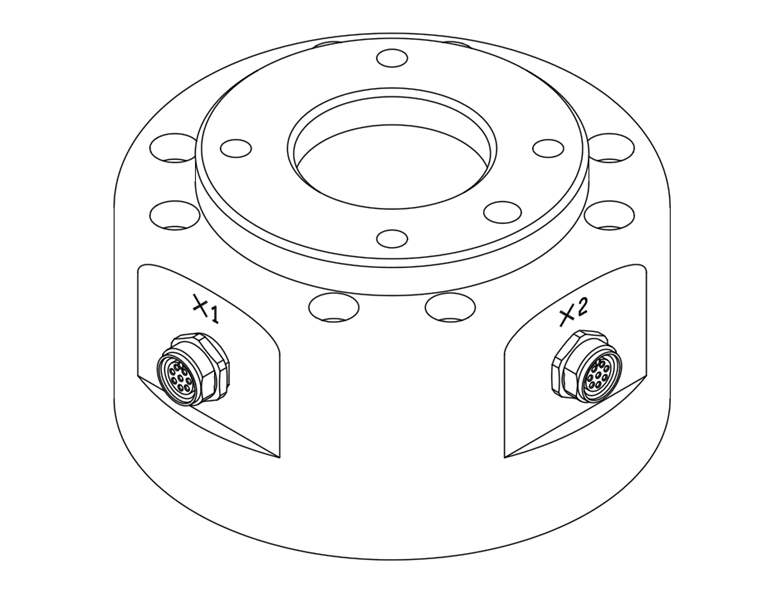
Dva konektory zajišťují napájení a řízení signálů potřebných pro provoz uchopovače a snímačů zabudovaných ve specifických nástrojích robota. Níže jsou uvedeny příklady průmyslových kabelů (lze použít odpovídající kabely):
- Phoenix contact 1404178, male (rovný)
- Phoenix contact 1404182, male (pravoúhlý)
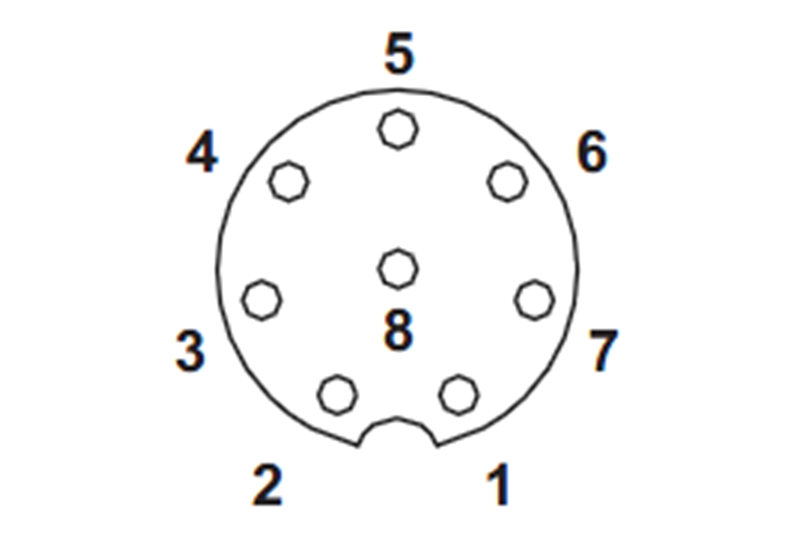
Mapa kolíků každého konektoru je následující:
Schematický diagram
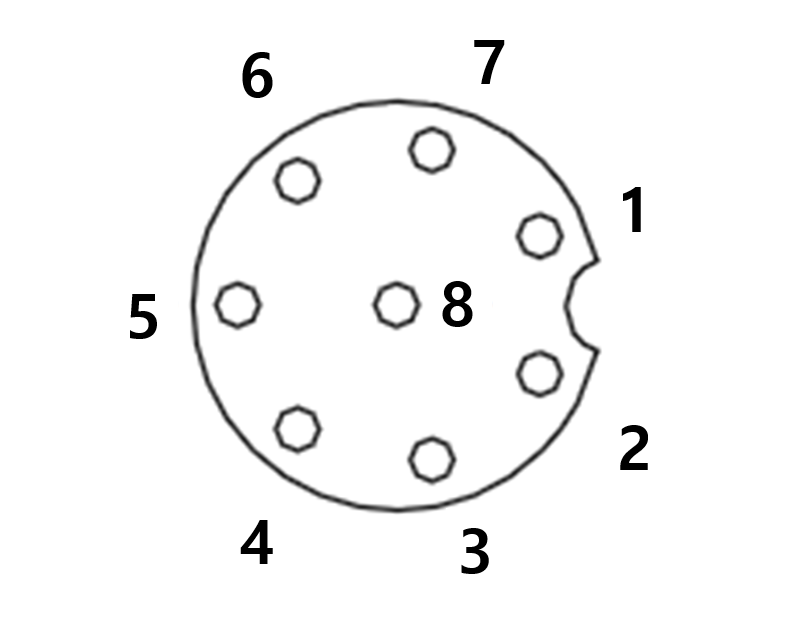
produktů vyrobených od srpna 2022, orientace konektoru byla změněna, jak je znázorněno na obrázku níže.
Funkce I/O poskytované prostřednictvím konektorů X1 a X2 se vzájemně liší. Podívejte se do níže uvedené tabulky, kde je popsáno podrobné nastavení I/O.
Nastavení X1 (Digitální I/O)
No | Signal type | Description |
1 | Digital Input 1 | PNP (typ zdroje, výchozí) |
2 | Digital Output 1 | nastavte buď na PNP (Source Type, výchozí) nebo NPN (Sink Type) |
3 | Digital Output 2 | nastavte buď na PNP (Source Type, výchozí) nebo NPN (Sink Type) |
4 | Digital Output 3 | nastavte buď na PNP (Source Type, výchozí) nebo NPN (Sink Type) |
5 | Power | +24V |
6 | Digital Input 3 | PNP (typ zdroje, výchozí) |
7 | Digital Input 2 | PNP (typ zdroje, výchozí) |
8 | GND |
Nastavení X2 (Digitální I/O)
No | Signal type | Description |
1 | Digital Input 4 | PNP (typ zdroje, výchozí) |
2 | Digital Output 4 | nastavte buď na PNP (Source Type, výchozí) nebo NPN (Sink Type) |
3 | Digital Output 5 | nastavte buď na PNP (Source Type, výchozí) nebo NPN (Sink Type) |
4 | Digital Output 6 | nastavte buď na PNP (Source Type, výchozí) nebo NPN (Sink Type) |
5 | Power | +24V |
6 | Digital Input 6 | PNP (typ zdroje, výchozí) |
7 | Digital Input 5 | PNP (typ zdroje, výchozí) |
8 | GND |
Interní napájení I/O příruby je nastaveno na 24 V. Podívejte se do níže uvedené tabulky, kde je podrobně popsáno připojení I/O.
Parametr | Min | Typ | Max | Jednotka |
Supply voltage | - | 24 | - | V |
Supply current | - | - | 3 | A |
Digital output | - | 6 | - | EA |
Digital input | - | 6 | - | EA |
Nastavení je od 22. března 2024 zpoplatněno následovně
Nastavení X1
No | Signal type | Description |
|---|---|---|
1 | Digital Input 1 | PNP (typ zdroje, výchozí) |
2 | Digital Output 1 | nastavte buď na PNP (Source Type, výchozí) nebo NPN (Sink Type) |
3 | Digital Output 2 | nastavte buď na PNP (Source Type, výchozí) nebo NPN (Sink Type) |
4 | Analog Input 1 / RS-485 + | nastavte buď na Napětí (0-10V) nebo Proud (4-20mA, výchozí) / Maximální přenosová rychlost 1M |
5 | Power | Nastavte vnitřní napájení na +24V (výchozí), +12V nebo 0V |
6 | Analog Input 2 / RS-485 - | nastavte buď na Napětí (0-10V) nebo Proud (4-20mA, výchozí) / Maximální přenosová rychlost 1M |
7 | Digital Input 2 | PNP (typ zdroje, výchozí) |
8 | GND |
Nastavení X2
| No | Signal type | Description |
|---|---|---|
| 1 | Digital Input 3 | PNP (typ zdroje, výchozí) |
| 2 | Digital Output 3 | nastavte buď na PNP (Source Type, výchozí) nebo NPN (Sink Type) |
| 3 | Digital Output 4 | nastavte buď na PNP (Source Type, výchozí) nebo NPN (Sink Type) |
| 4 | Analog Input 3 / RS-485 + | nastavte buď na Napětí (0-10V) nebo Proud (4-20mA, výchozí) / Maximální přenosová rychlost 1M |
| 5 | Power | Nastavte vnitřní napájení na +24V (výchozí), +12V nebo 0V |
| 6 | Analog Input 4 / RS-485 - | nastavte buď na Napětí (0-10V) nebo Proud (4-20mA, výchozí) / Maximální přenosová rychlost 1M |
| 7 | Digital Input 4 | PNP (typ zdroje, výchozí) |
| 8 | GND |
Nastavte vnitřní napájení na 24V, 12V nebo 0V.
Elektrické specifikace jsou uvedeny níže:
| Parameter | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply voltage (12V mode) | 11.4 | 12 | 12.6 | V |
| Supply voltage (24V mode) | 22.8 | 24 | 25.2 | V |
| Supply current | - | - | 3 | A |
Varování
- Nástroj a uchopovač nastavte tak, aby při vypnutí napájení nehrozilo žádné nebezpečí.
(Např. pád obrobku z nástroje) - Svorka č. 5 každého konektoru vždy dává napětí 24 V, zatímco je robot napájen, a proto když nastavujete nástroj a uchopovač, vždy vypněte napájení robota.