
Zarovnání podle osy základny/světové osy
Když se pracovní položka umístí ve směru základnové/světové osy robota, lze TCP na obrobku zarovnat před učením obrobku. Učící pozici lze nakonfigurovat v řadě s osou Základnových/Světových souřadnic, díky čemuž je snazší specifikovat učící pozici. Chcete-li po uzamčení pozice provést učení, použijte pomocí tlačítek „Kokpit“ funkci přímého učení uzamčeného vzhledem k rovině nebo přímce.
Chcete-li robota zarovnat podle osy základny, postupujte podle následujících kroků:
- Vyberte kartu Zarovnat a vyberte kartu Základní vyrovnání.
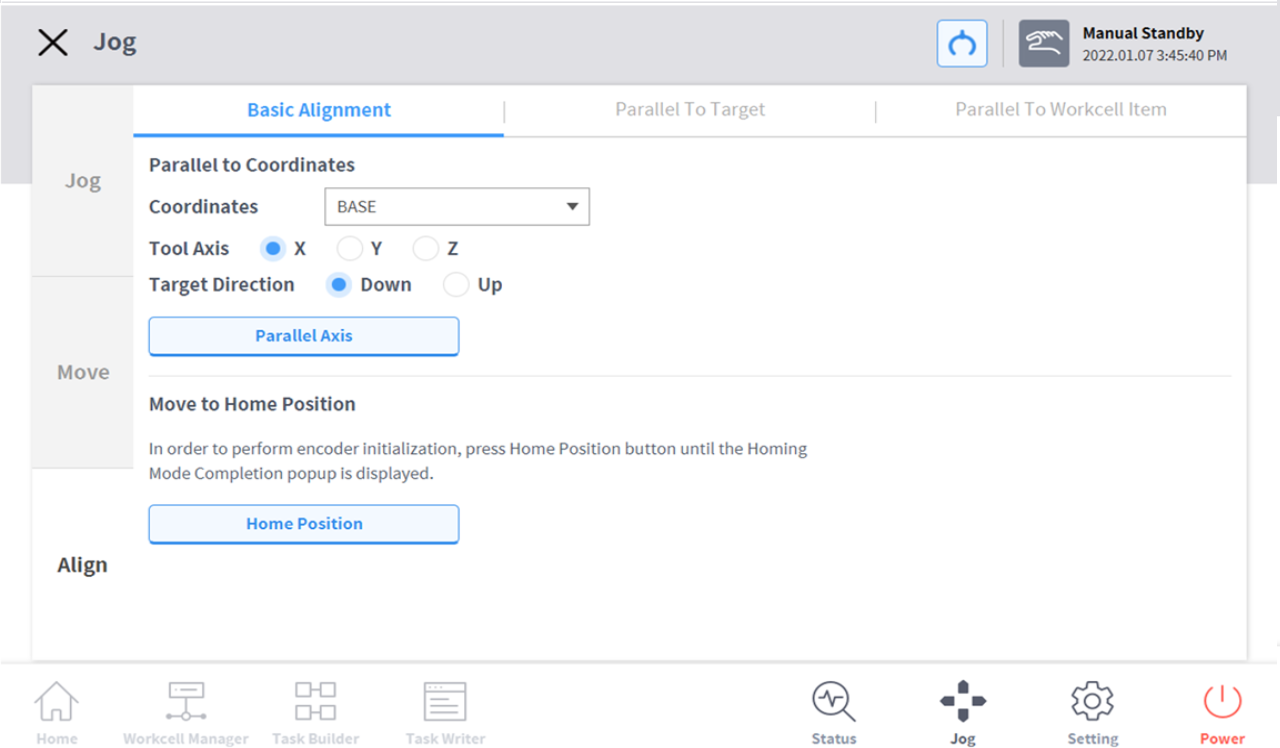
- Vyberte referenční souřadnice pro zarovnání.

- Vyberte osu referenčního nástroje.

- Vyberte směr zarovnání.

- Klepněte na tlačítko Zarovnat osu, čímž osu zarovnáte.