
Nastavení světových souřadnic
Lze nastavit systém souřadnic představující robota a obrobek. Tento systém souřadnic se nazývá Světové souřadnice, a je odlišný od Základnových souřadnic základny, které jsou fixovány k základně. Pomocí Světových souřadnic lze nastavit pozici Základnových souřadnic, přičemž Světové souřadnice lze vybrat, když se provádí učení a posouvání pomocí robota v režimu Task Builder a Task Writer. Chcete-li nastavit Světové souřadnice, klepněte na tlačítko 
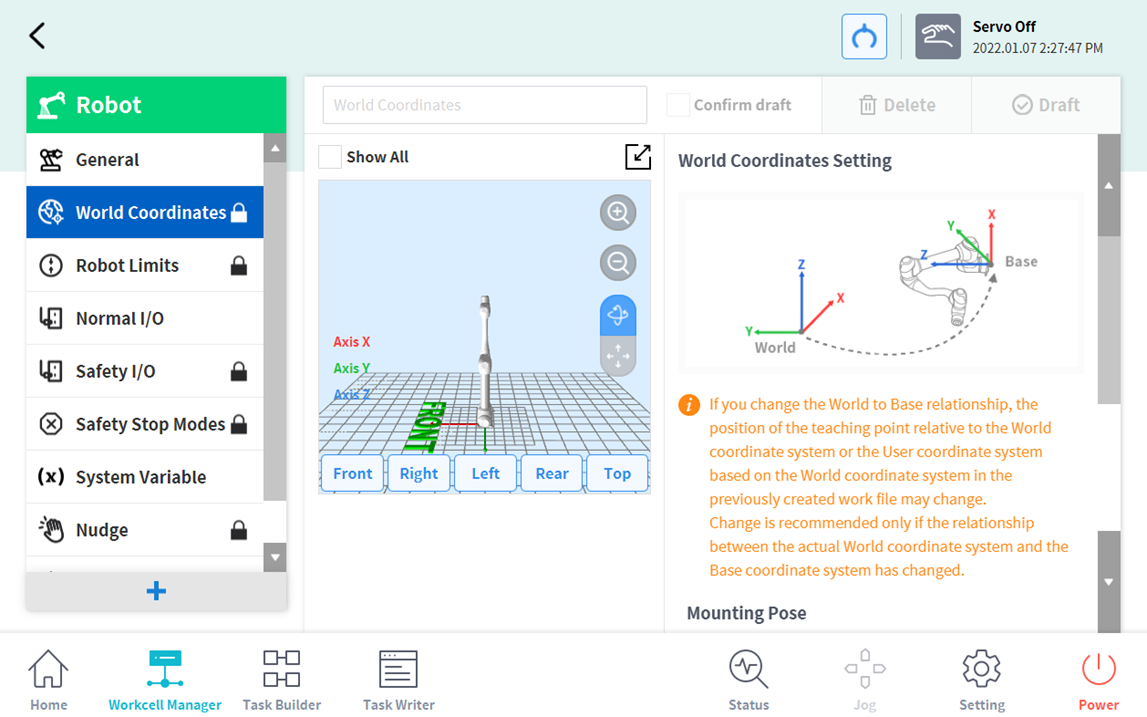
- Klepněte na tlačítko Upravit v horní části.
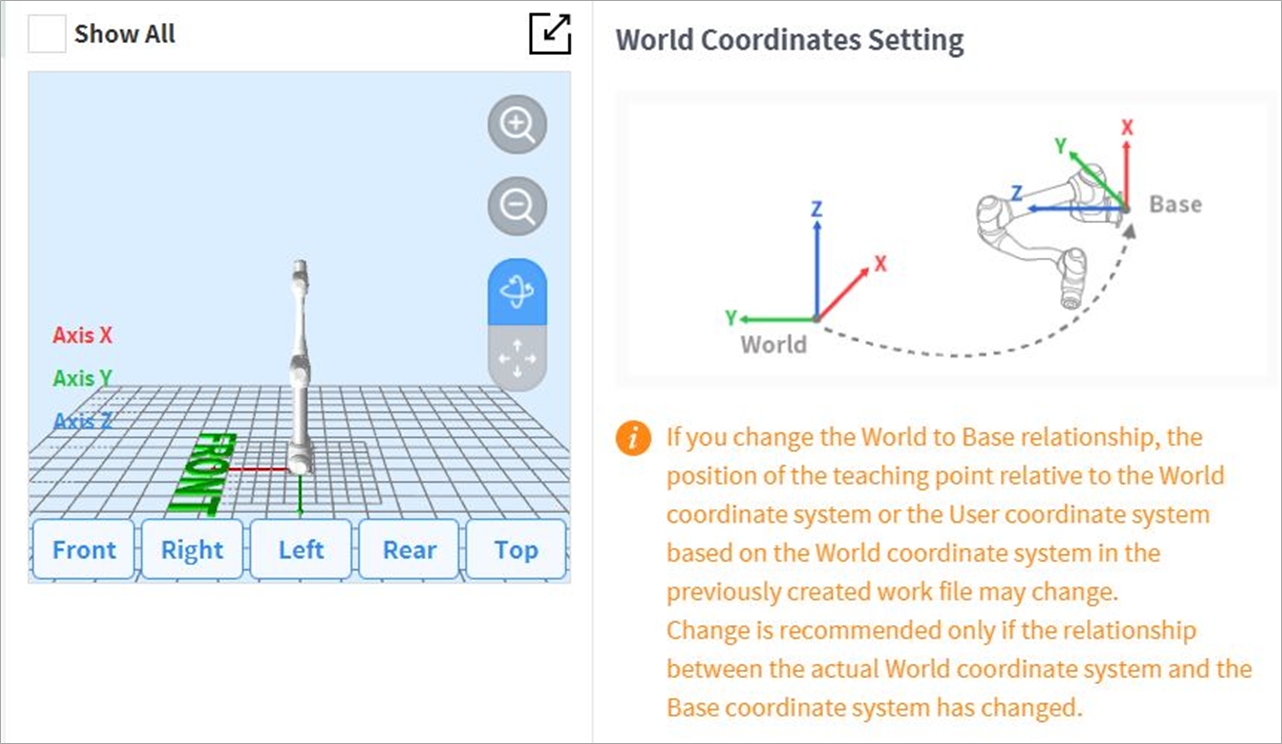
Podívejte se prosím na obrázek znázorňující vztah mezi Světovými souřadnicemi a Základnovými souřadnicemi.
Varování
Když se mění vztah mezi Světovými a Základnovými souřadnicemi, učící bod Světových souřadnic nebo uživatelských souřadnic založených na Světových souřadnicích lze změnit. Změny se doporučují pouze tehdy, když se mění skutečný vztah mezi Světovými souřadnicemi a Základnovými souřadnicemi.
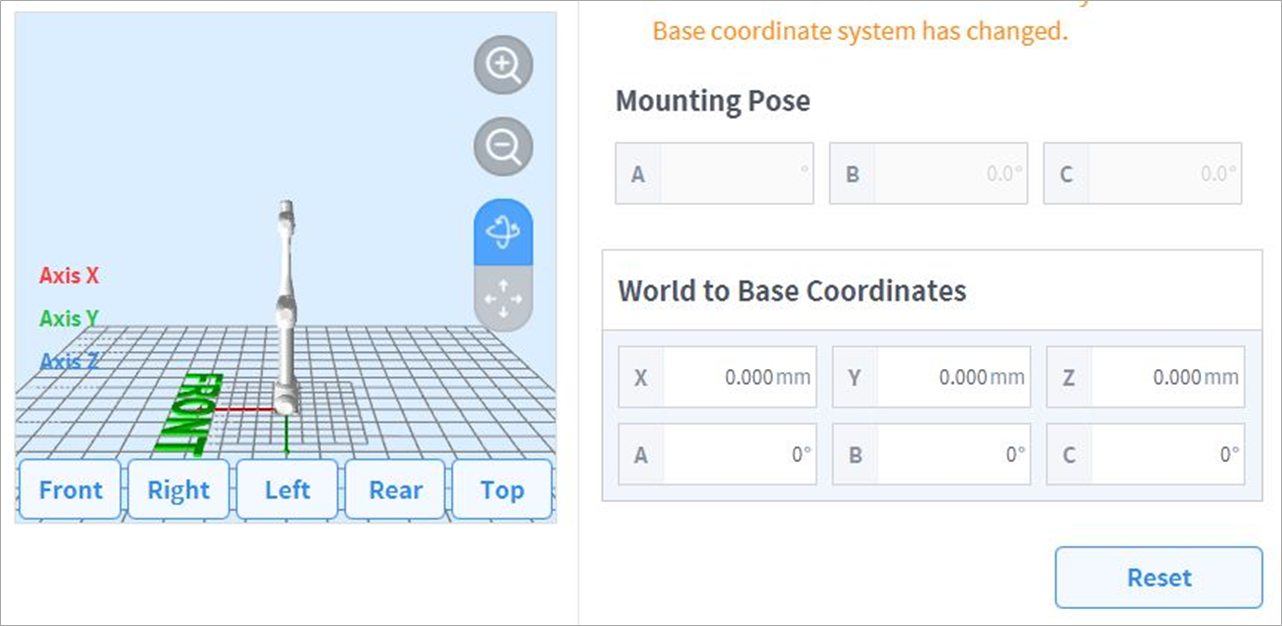
- V pravém centru se zobrazí montážní pozice (naklonění instalace). Obecně platí, že Světové souřadnice popisují pracovní prostředí z perspektivy uživatele, takže směr osy Z Světových souřadnic je směr stropu. Vzhledem k tomu, že jedna osa Základnových souřadnic je fixovaná ke spodní rovině robota, vztah mezi Světovými souřadnicemi a Základnovými souřadnicemi se mění podle umístění nebo pozice nainstalování robota. Obrázek uvedený výše vychází z toho, že robot je nainstalovaný na zdi. V tomto případě je osa Z Základnových souřadnic kolmá ke zdi, která je paralelní s osou Y Světových souřadnic, přičemž sklon montážní pozice je zobrazen jako 90 stupňů a rotace montážní pozice je 0 stupňů. Vztah mezi Světovými a Základnovými souřadnicemi je definován jako vztah Základnových souřadnic na základě Světových souřadnic. Pokud existuje předdefinované rozložení pracovního prostředí, nastavte podle toho i souřadnice. Hodnoty X/Y/Z středního pohybu a hodnoty A/B/C střední rotace založené na definici Eulerovy Z-Y-Z. Pokud je montážní poloha definována podle instalační pozice robota, je vhodné jako montážní polohu B/C použít rotační úhel B/C. Pokud je však montážní pozice nastavena pomocí funkce Automatického doplnění, předpokládaná hodnota může obsahovat odchylku, a proto se doporučuje použít rotační úhel definovaný v závislosti na rozložení.
- Klepněte na tlačítko Použít.
- Klepněte na tlačítko Potvrdit.
Poznámka
V uživatelských programech vytvořených po aplikaci naklonění instalace pomocí Task Builder a Task Writer v SW verzích dřívějších než GF020400 se musí nastavit Světové souřadnice s nakloněním instalace aplikovaným při aktualizaci SW verzí pozdějších než GF020400 a v rámci uživatelského programu konvertovat všechny Základnové souřadnice na Světové souřadnice, aby se správně používaly stávající učící body.
Pokud se používá více robotů ve společném pracovním prostředí nebo pokud je robot nainstalován na pohybujícím se zařízení, jako je mobilní základna nebo lineární dráha, pak se vztah a poloha učícího bodu mezi obrobkem a základnou robota může měnit. V takovém prostředí lze nastavit Světové souřadnice, které se snadno učí pro práci a sdílení.
Když je nástroj nainstalován nebo vyměněn, před provozováním robota je třeba nakonfigurovat hmotnost nástroje. Další informace o nastavení hmotnosti nástroje najdete v části Nastavení hmotnosti nástroje.