Vysvětlení základních zásad dovednostních příkazů
Dovednostní příkazy jsou založeny na několika provozních vzorech.
Aby robot mohl zahájit provoz, musí být nakonfigurována hmotnost a střed nástroje (TCP), kterým je robot vybaven, přičemž základní operační vzor příkazů dovednosti musí mít přístupovou pozici a zatahovací pozici, které jsou kolmé k referenční poloze.
Nastavení TCP: Použitím dovednostního příkazu pro koncový efektor se automaticky změní nastavení ofsetu TCP. Fáze provedení dovednostního příkazu koncového efektoru zahrnuje nastavení ofsetu vhodné pro TCP koncového efektoru. Pokud se ofset TCP změní, funkci kombinovaného pohybu, která plynule napojuje příkaz předchozího pohybu, nelze použít.

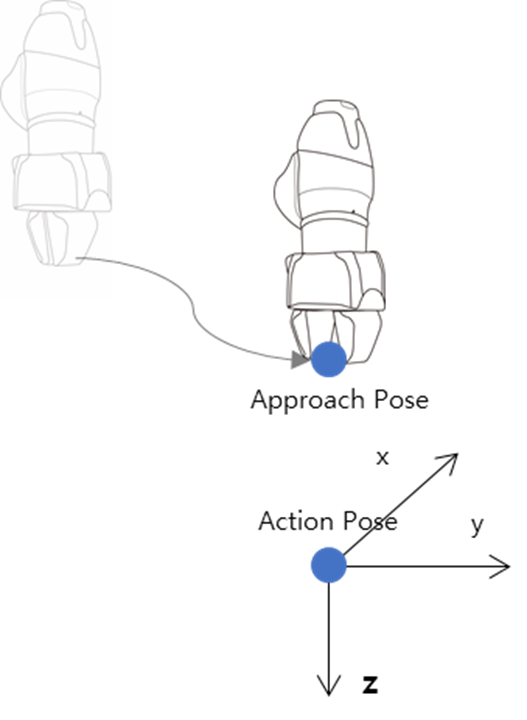
Přesun do přístupové pozice: Jedná se o bod, který je dostupný pro pohyb do přístupové pozice. Je z přístupové pozice nastaven ve směru osy Z, ale lze vybrat i jiný směr. Zadaná Přístupová vzdálenost se automaticky vypočítá pro Akční pozici a posune se do odpovídajícího bodu.
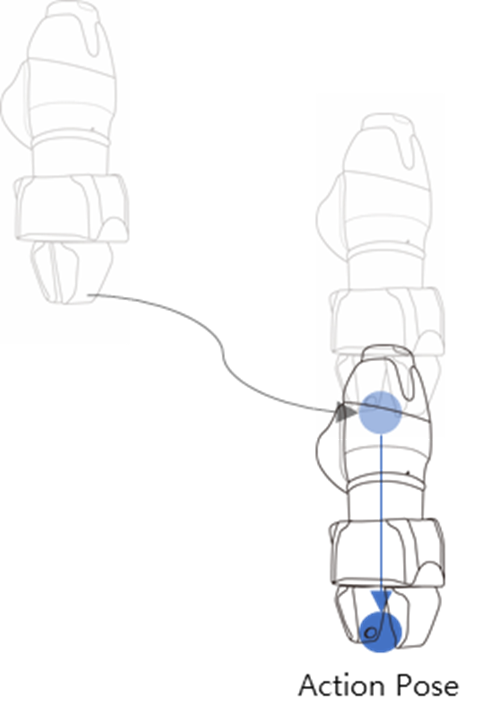
Přesun do referenční pozice: Jedná se o bod na obrobku, kde koncový efektor provede danou práci. Chcete-li nastavit podrobné souřadnice jiné než rychlost a zrychlení pro referenční polohu, stiskněte 
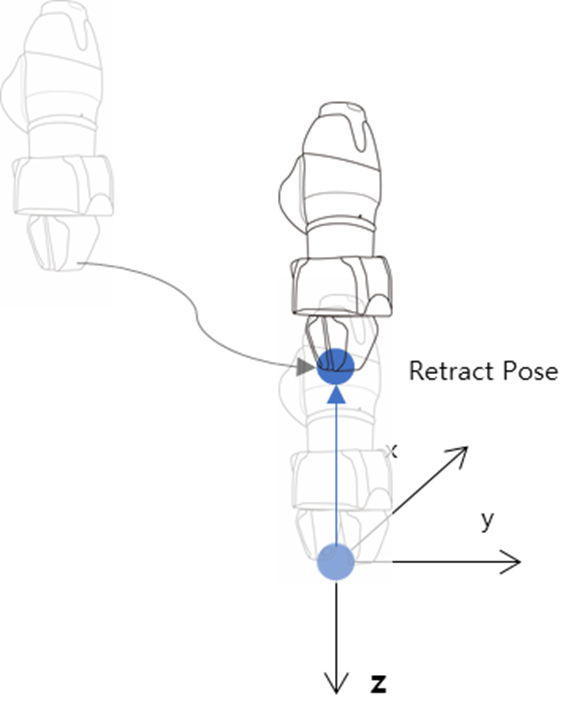
Přesun do retrakční pozice: Jedná se o bod pro odebrání obrobku a jeho bezpečné přenesení do jiného bodu. Je to z přístupové pozice ve směru osy Z, ale lze vybrat i jiný směr. Zadaná Retrakční vzdálenost se automaticky vypočítá pro Akční pozici a posune se do odpovídajícího bodu.
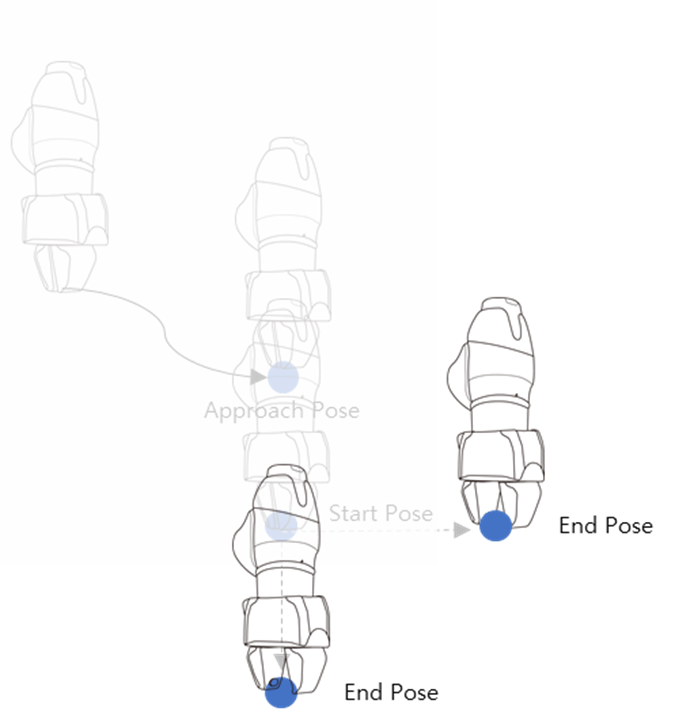
Posun do počáteční pozice: Pokud cíl provedení koncového efektoru není zakončen jedním pohybem, může být nadefinován mezilehlý bod a koncový bod, přičemž počáteční akční pozice je bod, kde úkon začíná. (tj. dovednost Door_OpenClose – počáteční pozice)
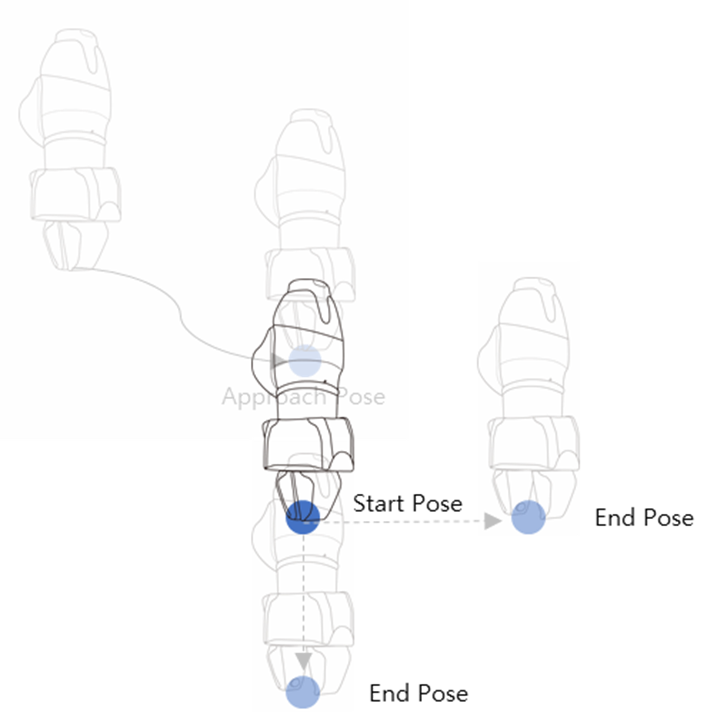
Přesun do koncové pozice: Pokud cíl provedení koncového efektoru není zakončen jedním pohybem, může být nadefinován mezilehlý bod a koncový bod, přičemž koncová akční pozice je bod, kde úkon končí. (tj. dovednost Door_OpenClose – koncová pozice)