Dovednost – vyzkoušejte vzorky pro odběr a umístění
VOLITELNÉ NORMÁLNÍ 20 MIN
Tento vzorek je vytvořen v nástroji Task Builder. Aplikace Task Writer nepodporuje funkci dovednost.
Pozor
- Před zkoušením vzorku si přečtěte a dodržujte Upozornění při použití. Další informace naleznete ČÁST 1. Bezpečnostní příručkav části .
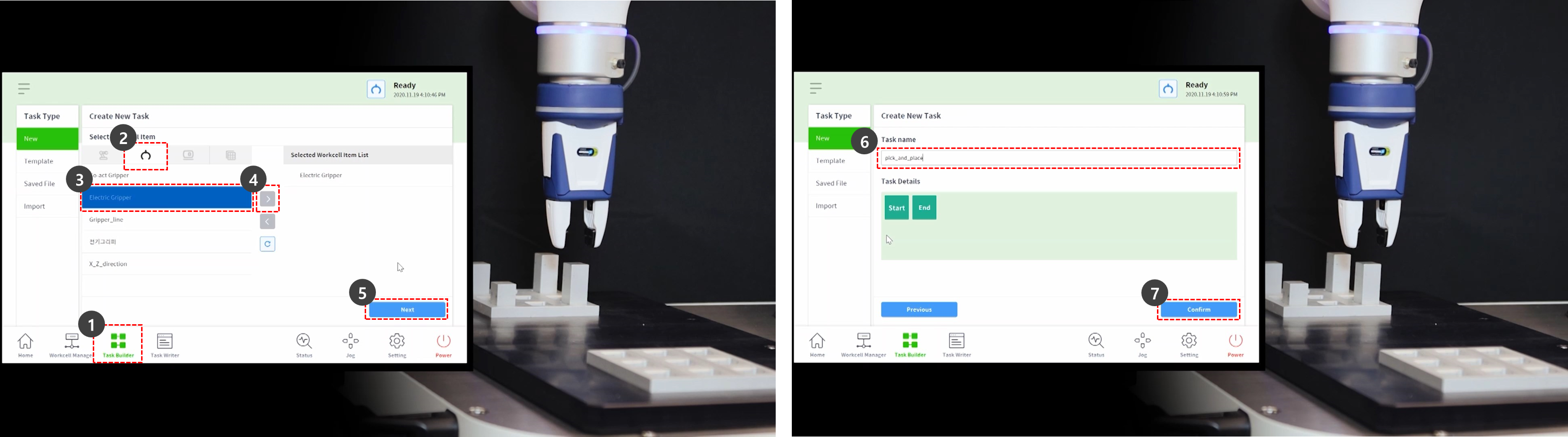
- V dolní nabídce vyberte nástroj Task Builder.
- Vyberte ikonu Vybrat položku pracovní buňky > zakladač.
- Vyberte zakladač zaregistrovaný jako položku pracovní buňky. Tento vzorek nelze vyzkoušet, pokud není zakladač zaregistrován jako položka pracovní buňky.
- Stisknutím tlačítka > zaregistrujte položku pracovní buňky jako vybranou položku pracovní buňky.
- Stiskněte tlačítko Další.
- Zadejte název úlohy.
- Stiskněte tlačítko Potvrdit.
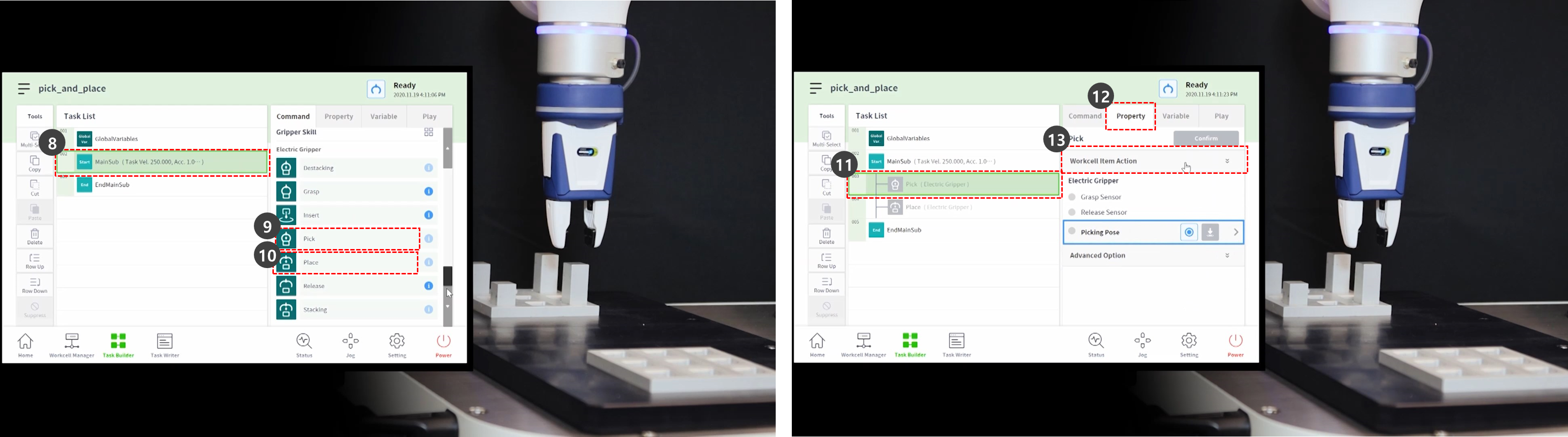
- Vyberte příkaz MainSub z druhého řádku seznamu úkolů. Na další řádek vybraného řádku se přidá nový příkaz.
- Přidejte příkaz Vybrat dovednost.
- Přidejte příkaz umístit dovednost.
- Vyberte příkaz Vybrat ze třetího řádku seznamu úkolů.
- Vyberte kartu vlastnost.
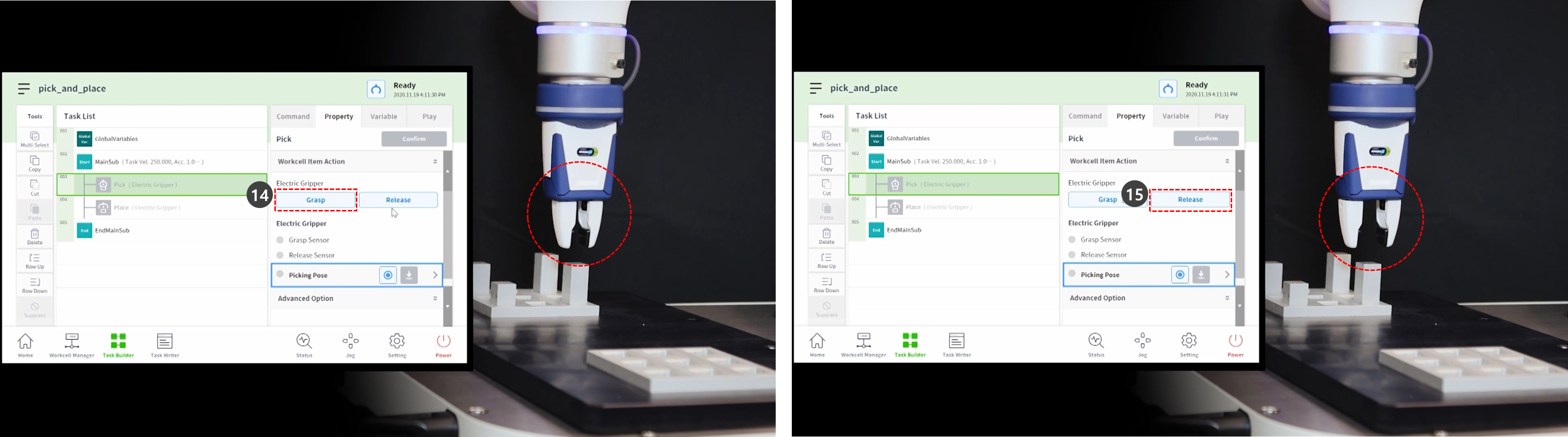
- Stisknutím tlačítka akce položky pracovní buňky rozbalte nabídku. Je-li vybrána položka pracovní buňky zakladače, lze akci zakladače testovat během akce pracovní buňka.
- Chcete-li zakladač otestovat, stiskněte tlačítko uchopit a proveďte uchopovací pohyb.
- Chcete-li zakladač otestovat, stiskněte tlačítko uvolnění a proveďte uvolňovací pohyb.
- V případě lehkých obrobků umístěte obráběný dílec do zakladače a stiskněte tlačítko pro uchopení, aby robot držel obráběný dílec. Provádění výuky v době, kdy uchopovač drží obrobek, může pomoci určit přesnou polohu.
- Mít robota během výuky držet obrobek však není povinné, ale je to příklad.
- V případě těžkých obrobků může dojít k nebezpečným situacím, protože zakladač může obráběný dílec ztratit.
- V případě těžkých obrobků musí hmotnost nástroje v Nastavení nástroje zahrnovat hmotnost nástroje a hmotnost obrobku.
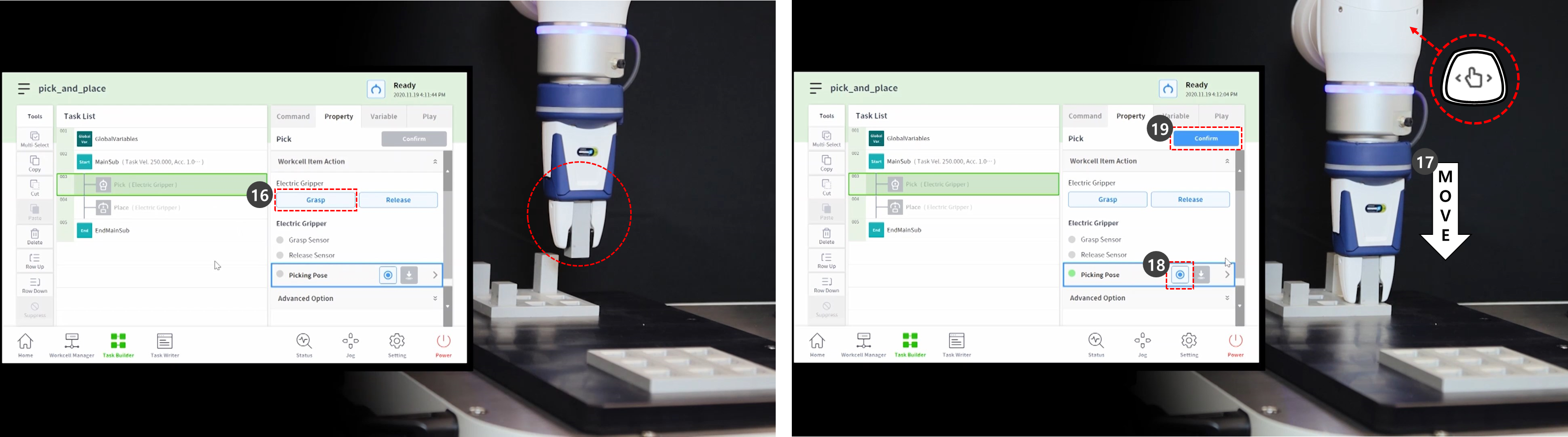
- Pomocí přímého učení přesuňte robota do místa, kde bude provedeno vyzvednutí.
- Stisknutím a přidržením tlačítka ručního navádění v kokpitu se robot pohybuje.
- Stiskněte tlačítko získat pozici na pozici výběru.
- Stiskněte tlačítko Potvrdit.
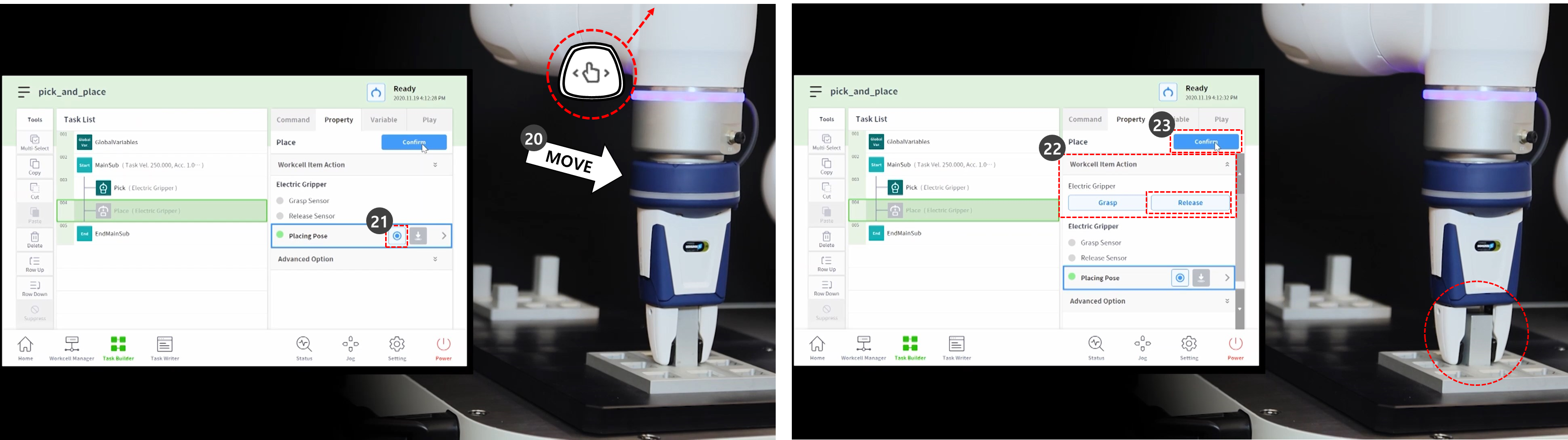
- Pomocí přímého učení přesuňte robota do místa, kde bude provedeno.
- Stiskněte tlačítko Get Pose (získat pozici) v pozici Placing Pose (umístění pozice).
- Chcete-li uvolnit obráběný dílec ze zakladače, stiskněte tlačítko uvolnění.
- Stiskněte tlačítko Potvrdit.
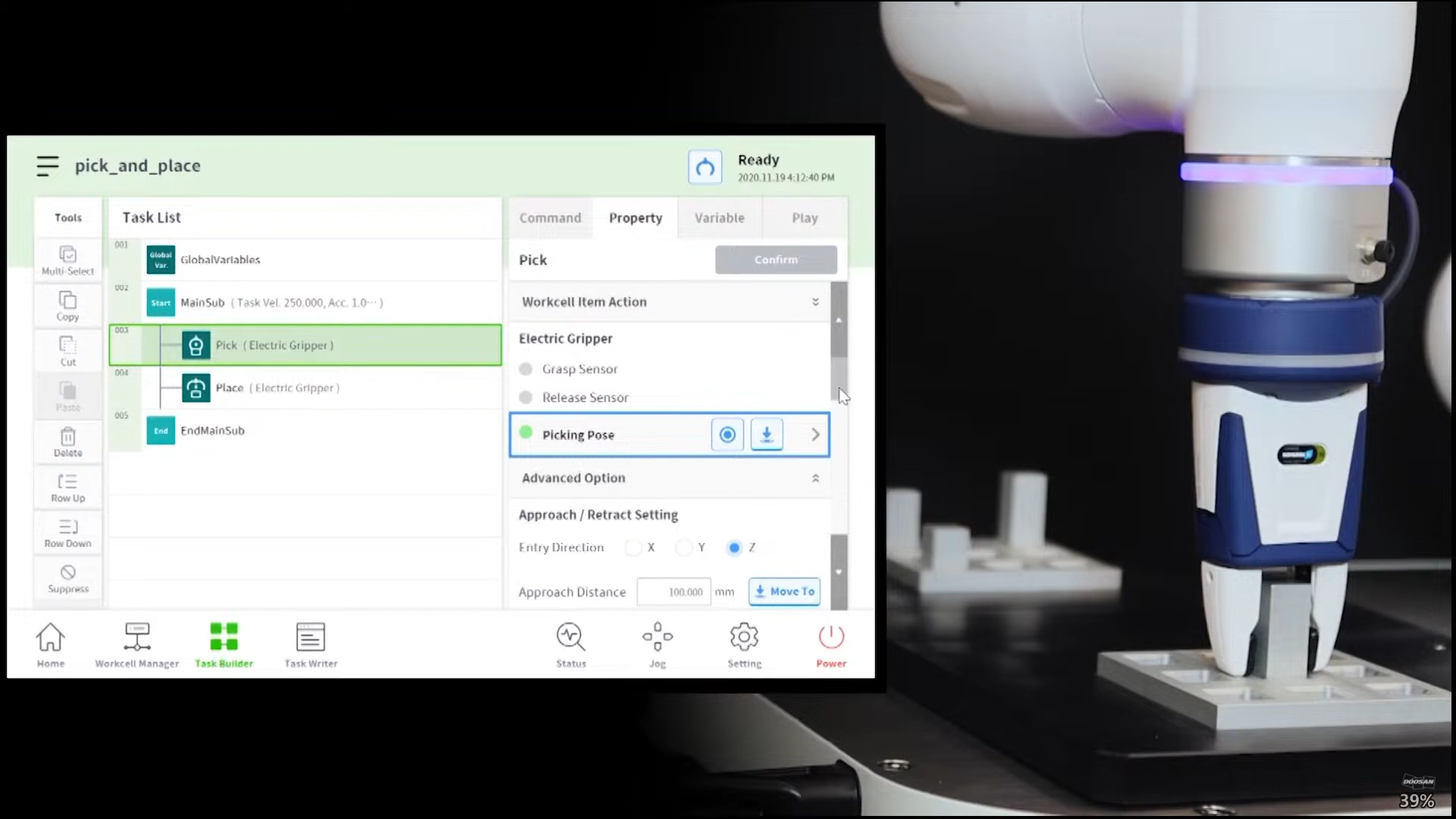
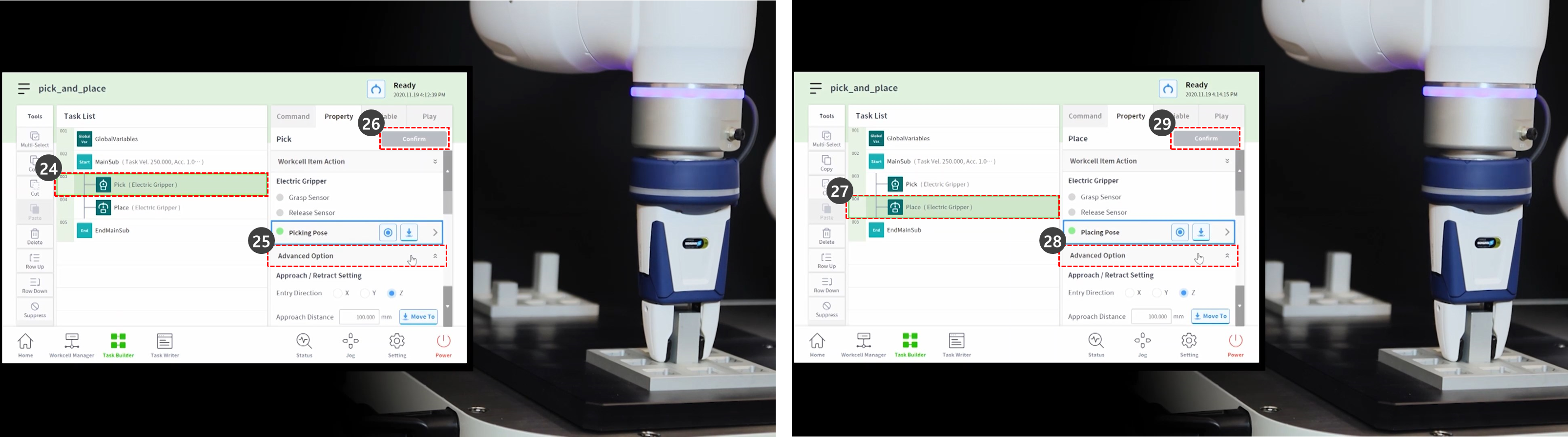
- Chcete-li nastavit podrobná nastavení příkazů k výběru a umístění dovedností, vyberte příkaz k výběru ve třetím řádku seznamu úkolů.
- Stisknutím možnosti Upřesnit rozbalte nabídku a nastavte následující položky: Pro položky, které nejsou popsány níže, použijte výchozí hodnoty.
- Směr vstupu: Osa Z.
- Nastavuje směr pro vstup do polohy pro výběr.
- Vzdálenost najíždění: 100 mm
- Nastavuje vzdálenost těsně před tím, než se robot přiblíží k poloze sběrače. Zajišťuje dostatečnou vzdálenost pro přiblížení.
- Vzdálenost zasunutí: 100 mm
- Nastavuje vzdálenost po zasunutí robota v nastaveném směru z polohy Pick. Zajišťuje dostatečnou vzdálenost zasouvání.
- Rychlost přiblížení: 100 mm/s.
- Nastaví rychlost přiblížení nižší než výchozí hodnota, když se robot přiblíží k objektu.
- Kontrola dodržování předpisů: Zapnuto (zelená)
- Snímací kontakt: Zapnuto (zelená)
- Umožňuje kontrolu konformity a detekci kontaktů.
- Přítlačná síla: 10N
- Tolerance kontaktu: 10 mm
- Síla: 15N
- Odsazení nuly: 2 mm
- Před vyzvedáním uvolněte zakladač: Zapnuto (zelená)
- Před přiblížením k místu pro výběr nastaví zakladač do stavu uvolnit.
- Hmotnost nástroje: Žádné
- Pokud obráběný dílec není lehký, je nutné sečíst hmotnost obráběného dílce a hmotnost nástroje, přidat jako položku pracovní cely hmotnost nástroje a vybrat ji.
- Směr vstupu: Osa Z.
- Stiskněte tlačítko Potvrdit.
- Vyberte příkaz umístit ze čtvrtého řádku seznamu úkolů.
- Stisknutím možnosti Upřesnit rozbalte nabídku a nastavte následující položky: Pro položky, které nejsou popsány níže, použijte výchozí hodnoty.
- Směr vstupu: Osa Z.
- Vzdálenost najíždění: 100 mm
- Vzdálenost zasunutí: 100 mm
- Rychlost přiblížení: 100 mm/s.
- Kontrola dodržování předpisů: Zapnuto (zelená)
- Snímací kontakt: Zapnuto (zelená)
- Umožňuje kontrolu konformity a detekci kontaktů.
- Přítlačná síla: 10N
- Tolerance kontaktu: 10 mm
- Síla: 15N
- Hmotnost nástroje: Žádné
- Stiskněte tlačítko Potvrdit.
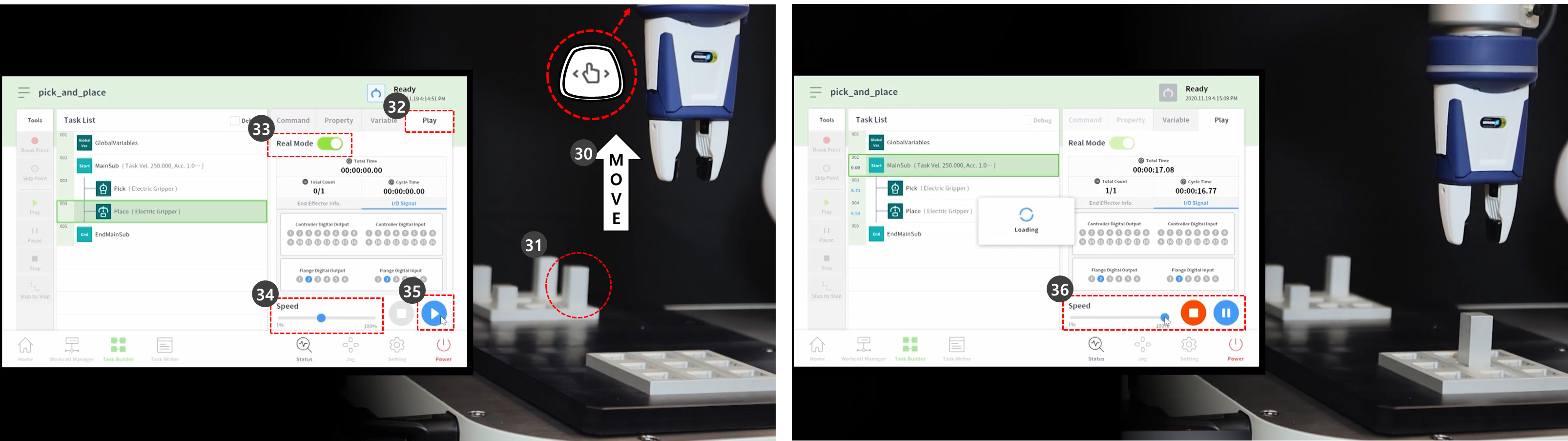
- Pomocí přímého učení přesuňte robota do bodu, kde se spustí Pick&Place.
- Přesuňte obráběný dílec na místo pro vyzvednutí.
- Vyberte kartu Přehrát.
- Aktivujte přepínací tlačítko reálného režimu.
- Nastavte posuvník rychlosti na 10–30 %.
- Tato posuvná lišta rychlosti nastavuje nastavenou rychlost všech příkazů na vybranou hodnotu %.
- Pokud je úkol proveden poprvé po jeho vytvoření, jeho spuštění nízkou rychlostí může zabránit neočekávaným rizikům.
- Stiskněte tlačítko Přehrát.
- Pokud je úloha dokončena bez problémů, upravte rychlost zpět na výchozí hodnotu, 100 % a znovu proveďte test.