Tlačítko kokpit (pět tlačítek)
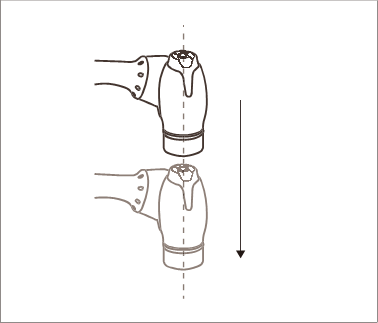
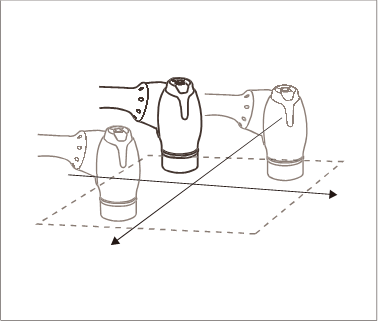
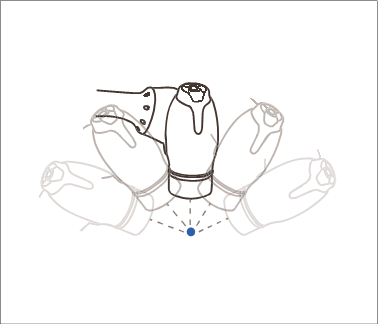
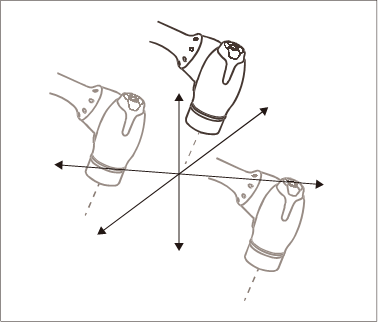
Uživatel může změnit pozici robota, zatímco drží stisknuté tlačítko Ručního navádění nebo nastavitelné tlačítko na kokpitu.
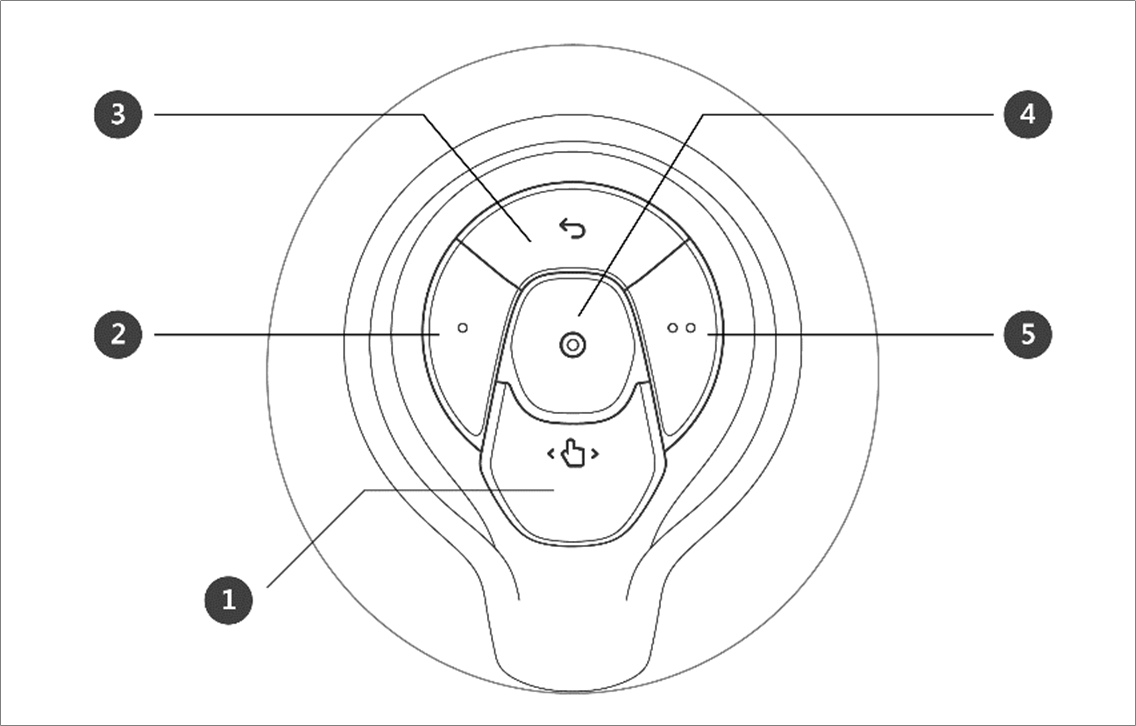
Č. | Položka | Popis |
|---|---|---|
1 | Hand-Guiding Button | Toto tlačítko se dá použít k nastavení nebo změně pozice robota. |
2,5 | User Setting Button | Tímto tlačítkem lze upravit pozici robota jejím zadáním podle stavu zámku odpovídajícího danému režimu.
Více informací o nastaveních najdete v části „Nastavení kokpitu “. |
3 | Cancel Button | Vymaže poslední uloženou pozici. |
4 | Save Pose Button | Uloží poslední pozici robota. Další informace najdete v části „Nastavení pracovního bodu dovednostního příkazu pomocí kokpitových tlačítek“. |