Konfigurace systému
| Č. | Položka | Popis |
|---|---|---|
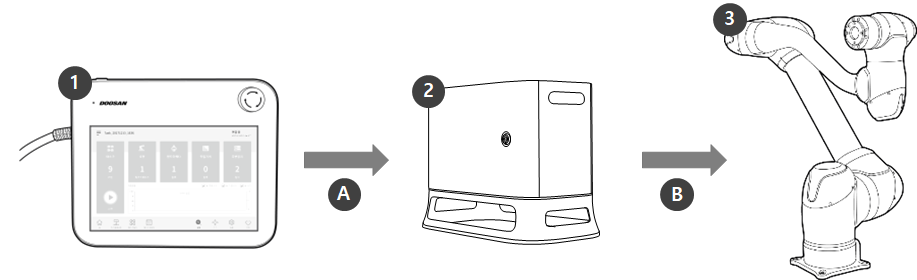
| 1 | Učící ovladač | Jedná se o zařízení, které řídí celý systém, a je schopné učit robota zaujímat specifické pozice a provádět příslušná nastavení manipulátoru a ovladač |
| 2 | Ovladač | Ovládá pohyby robota podle pozice nebo pohybu nastaveného učícím ovladačem. Má různé vstupní a výstupní porty, které umožňují připojení a použití různého vybavení a různých zařízení. |
| 3 | Manipulátor | Jedná se o průmyslového kolaborativního robota, který může provádět transport nebo montážní úkony s nejrůznějšími nástroji. |
| A | Command/ Monitoring | |
| B | Power Supply/ Network |
Poznámka
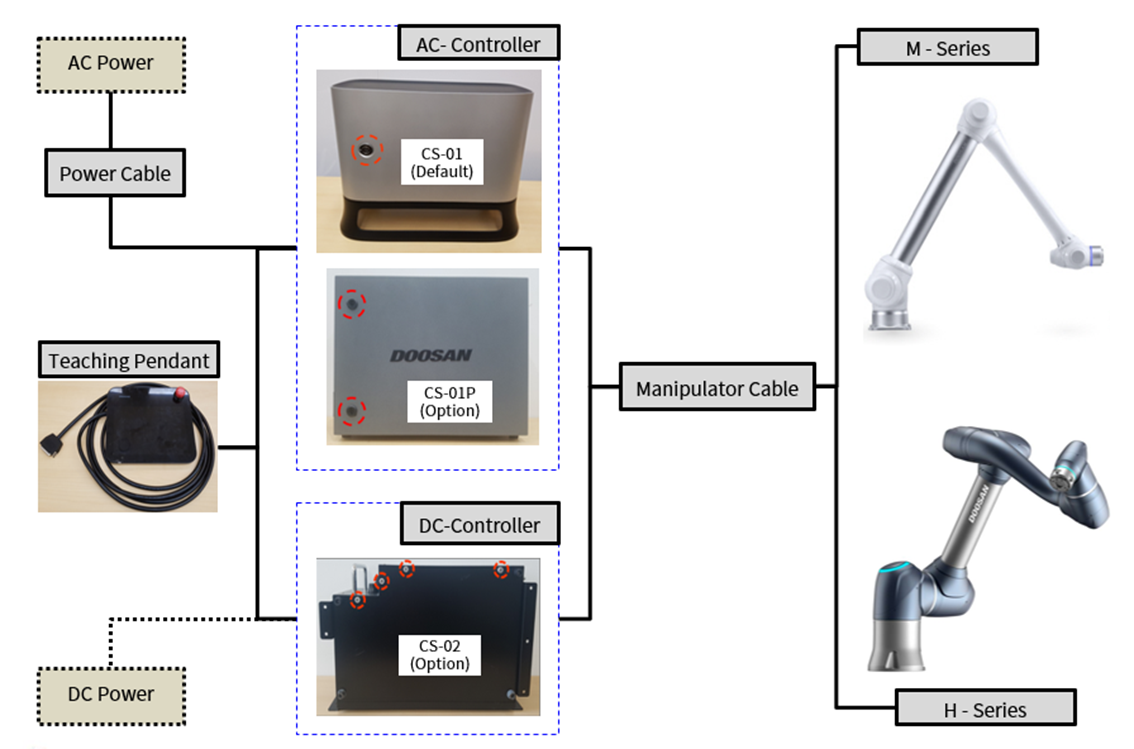
- Podívejte se na konfiguraci systému řady M a řady H uvedenou níže .