
Přehled základních konceptů za příkazem Move Editor úloh
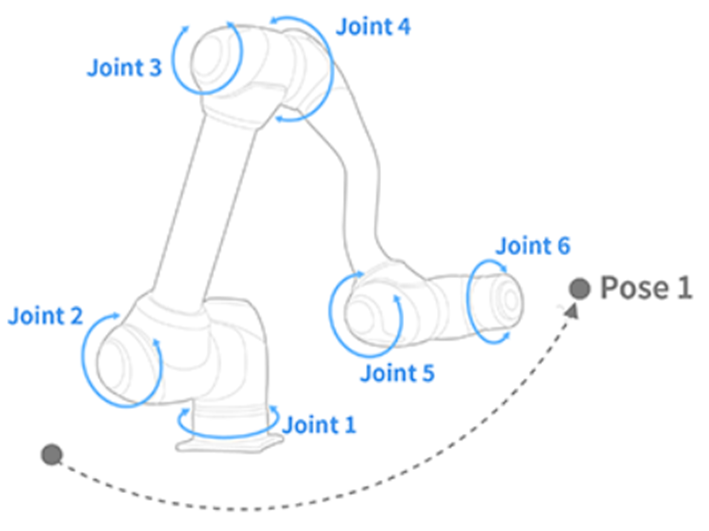
Roboty Doosan Robotics nabízejí 9 pohybů. Pohyb robota je řízen standardními pohyby, MoveJ a MoveL a 7 pohyby odvozenými z těchto dvou pohybů.
Typy pohybu robotů
Pohyb | Funkce | |
|---|---|---|
1 | MoveJ | Každý spoj robota se pohybuje od aktuálního úhlu k cílovému úhlu a současně se zastaví
 |
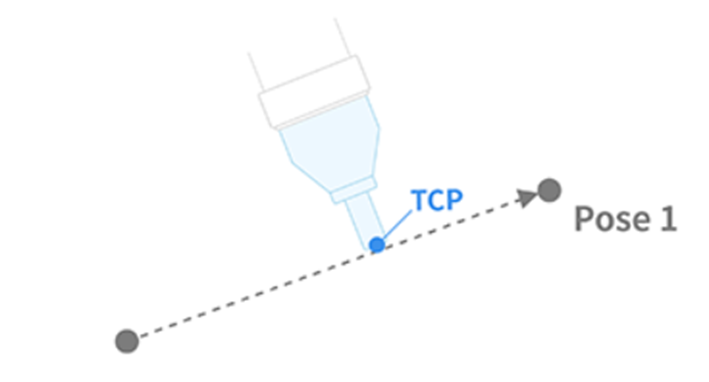
2 | MoveL | Robot se přesune do cílového bodu a současně udržuje robot TCP v přímém směru
 |
3 | MoveSJ | Robot se pohybuje ve všech úhlech nastavených robotem
|
4 | MoveSX | Robot TCP se pohybuje ve všech bodech
|
5 | MoveJX | Pozice robota je označena jako robot TCP se přesune do cílového bodu
|
6 | MoveC | Robot TCP se přesune do cílového bodu při zachování oblouku 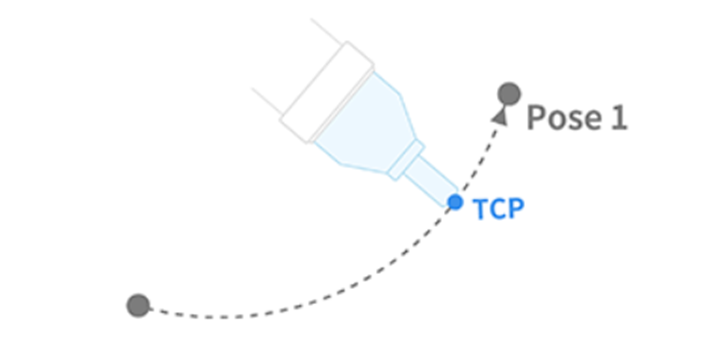 |
7 | MoveB | Robot se přesune do konečného cílového bodu přes úsek sestávající z průběžných přímých čar a oblouků 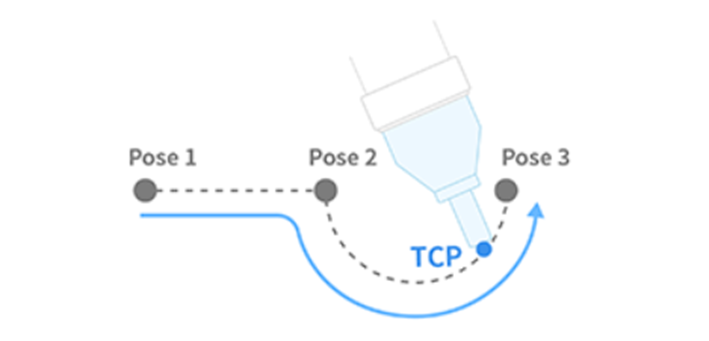 |
8 | MoveSpiral | Robot se pohybuje od středu spirály k maximálnímu poloměru 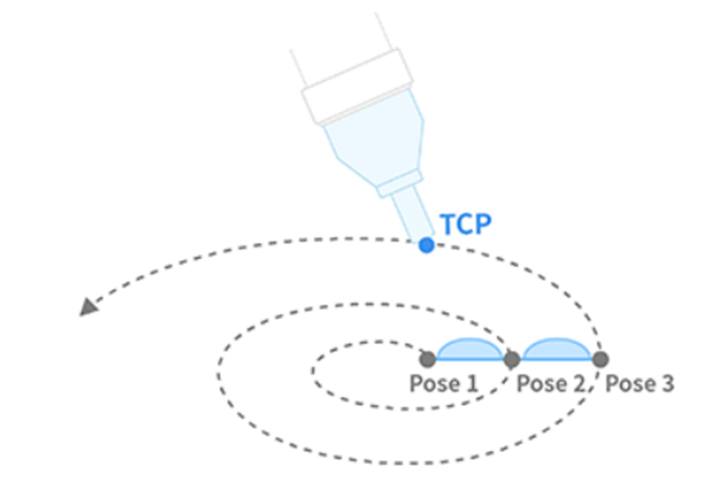 |
9 | MovePeriodic | Robot se pohybuje v cestě s konstantní amplitudou a cyklem 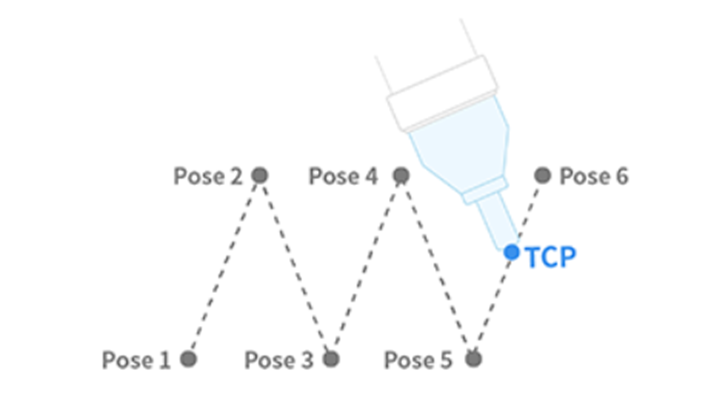 |
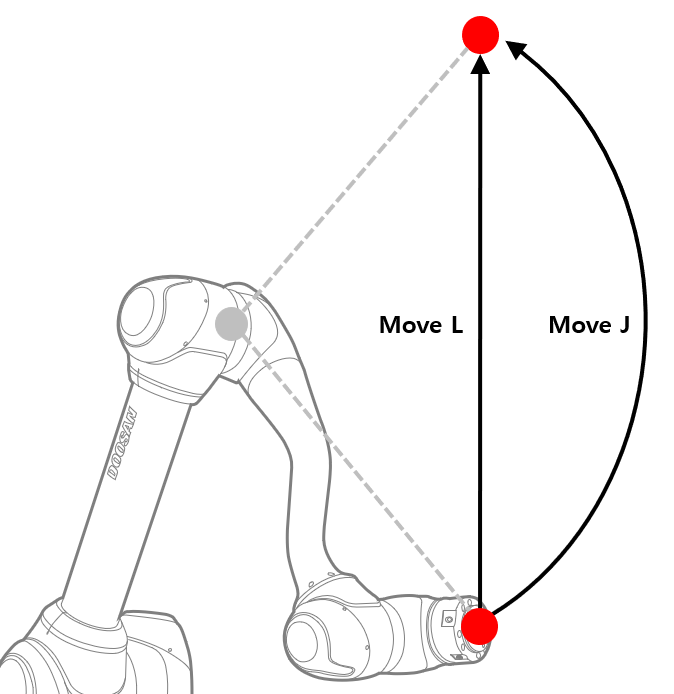
MoveJ&MoveL
Před použitím pohybu robota je důležité porozumět standardním pohybům MoveJ a MoveL.
J v MoveJ se týká kloubů. Při tomto pohybu se každý kloub pohybuje do cílového úhlu a současně se zastaví.
L v MoveL odkazuje na lineární. V tomto pohybu se TCP na konci robota pohybuje do cílové pozice (pozice a úhel) s lineárním pohybem.
Typ | MoveJ | MoveL | |
|---|---|---|---|
1 | Metoda přesunu |
|
|
2 | Výhoda |
|
|
3 | Nevýhoda |
|
|
4 | Využití |
|
|