
Modul pro obnovení
Modul pro obnovení: Pokud dojde k chybě při přetrvávajícím narušení bezpečnosti nebo pokud je nutné zabalit robota pro přepravu, může uživatel použít režim bezpečnostního zotavení pro konfiguraci polohy a úhlu robota.

Chcete-li získat přístup k modulu obnovení, klepněte na tlačítko obnovení umístěné dole.
Obnovení softwaru: Ve stavu vypnutí serva, pokud dojde k chybě při narušení bezpečnosti způsobenému bezpečnostními porušeními souvisejícími s polohou, jako je například robot vystupující z provozní oblasti nebo porušující zakázané oblasti, nebo pokud je při zastavení robota v důsledku kolize s pevným objektem nepřetržitě použita síla, servo zapnuto nebo Jog nelze nastavit ani při pokusu o obnovení normálního stavu robota pomocí Jog nebo programu. V takových případech se režim obnovení softwaru používá k resetování robota na normální.
Režim balení: Pro balení a přepravu robota lze pro přepravu nastavit předdefinované hodnoty (které přesahují běžný limit provozního úhlu).
Pokud je servo aktivováno při spuštění modulu pro obnovení, zobrazí se následující překryvné okno a servo se automaticky vypne.
Použití režimu obnovení softwaru
Režim obnovení softwaru
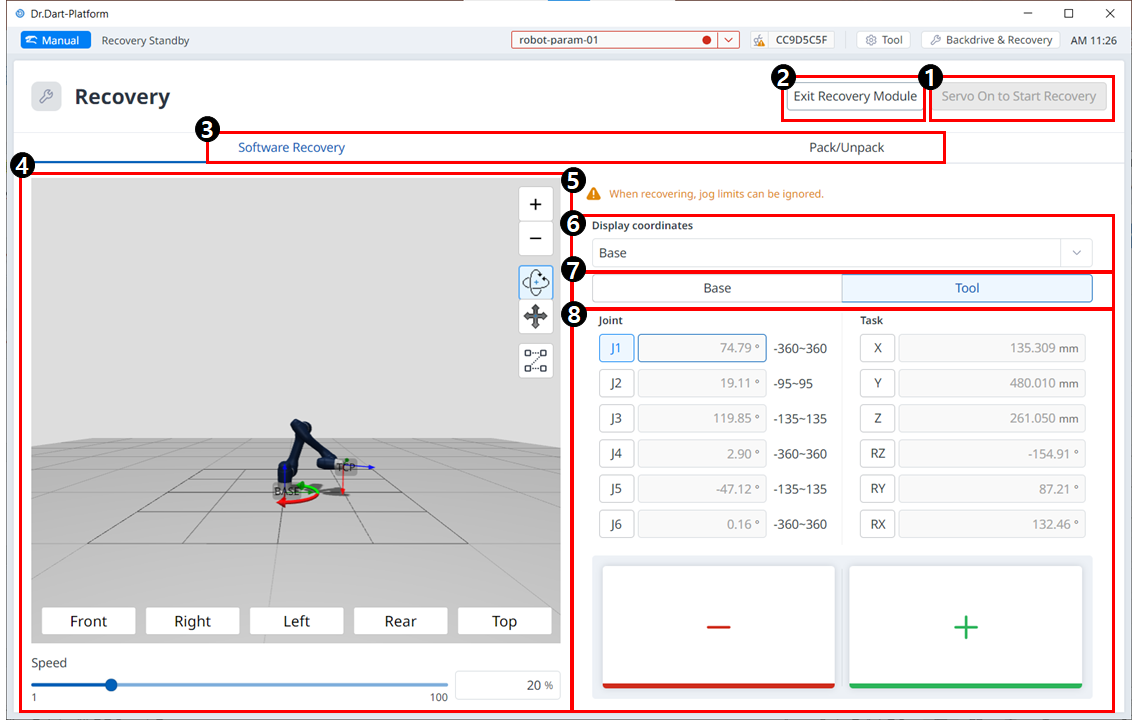
Nabídka
Položky | Popis | |
|---|---|---|
| 1 | Servo zapnuto pro zahájení obnovy | Toto je tlačítko, které aktivuje servo před vstupem do režimu obnovení. |
| 2 | Ukončete obnovení | Toto tlačítko umožňuje ukončit modul obnovení. |
| 3 | Žací lišta | Tato část umožňuje vybrat buď režim obnovení softwaru, nebo režim Pack/unpack. |
| 4 | 3D simulace | Tato oblast umožňuje zobrazit náhled 3D simulace nastavených hodnot. |
| 5 | Varovná zpráva | To vysvětluje opatření. |
| 6 | Zobrazení souřadnic | Zde můžete nastavit souřadnice na základě základny nebo světa. |
| 7 | Tlačítko Base/Tool | Zde můžete nastavit hodnotu na základě základny nebo nástroje. |
| 8 | Společný/úkol | Tato část umožňuje zadat požadované hodnoty pro pohyb robota. |
Chcete-li použít režim obnovení softwaru, postupujte takto:
Klepněte na nabídku obnovení v podokně záhlaví. V okně obnovení se automaticky zobrazí obrazovka obnovení softwaru.
Klepněte na každé společné tlačítko na pravé straně obrazovky obnovení softwaru a pomocí
 tlačítek , nastavte polohu. Nebo stiskněte tlačítka kokpitu pro nastavení úhlu kloubu přímým vyučováním.
tlačítek , nastavte polohu. Nebo stiskněte tlačítka kokpitu pro nastavení úhlu kloubu přímým vyučováním.Definice tlačítek v kokpitu naleznete v části kokpit (3.4.0-cs_CZ) Domácí pozice a kokpit
Změny provedené v nastavení se projeví v okně simulace vlevo v reálném čase.
Po dokončení nastavení zavřete okno klepnutím na tlačítko X v levém horním rohu.
Upozornění
Režim opravy softwaru není k dispozici, pokud je limit úhlu spoje překročen o 3 stupňů.
Použití balíčku/rozbalení
Nabídka
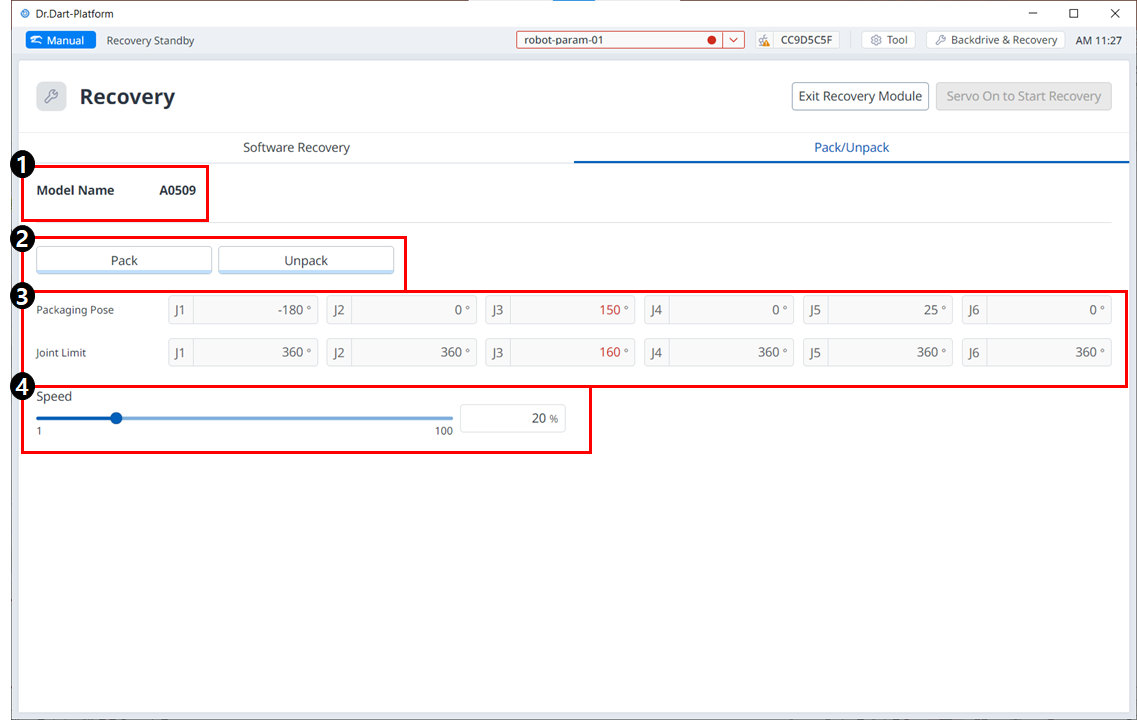
Položky | Popis | |
|---|---|---|
| 1 | Název modelu | Zobrazí se název připojeného modelu robota. |
| 2 | Sbalit/rozbalit | Lze vybrat buď balíček nebo rozbalovat. |
| 3 | Pozice balení/limit spoje | Zobrazí se hodnoty Pose a Joint limit. |
| 4 | Rychlostní poměr | Rychlost balení nebo režim vybalování lze nastavit pomocí posuvníku nebo vstupu. |
Chcete-li nakonfigurovat režim balení, postupujte takto:
Klepněte na nabídku obnovení v podokně záhlaví.

Vyberte kartu režim balení.

Klepnutím na tlačítko Servo Zapnuto spusťte obnovení, čímž povolíte režim balení.

Robot se automaticky přesune do nastavené pozice balení.
Tlačítko Pack umožňuje umístit robota do pozice Pack a tlačítko Unpack umožňuje umístit robota do výchozí výchozí výchozí polohy.